
国際特許分類[G01S13/87]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 無線による方位測定;無線による航行;電波の使用による距離または速度の決定;電波の反射または再輻射を用いる位置測定または存在探知;その他の波を用いる類似の装置 (17,599) | 電波の反射または再放射を使用する方式,例.レーダ方式;波長または波の性質が無関係または不特定の波の反射または再放射を使用する類似の方式 (5,353) | レーダ方式,例.一次レーダと二次レーダ,の結合 (202)
国際特許分類[G01S13/87]に分類される特許
141 - 150 / 202
侵入者検知システム、および、侵入者検知方法
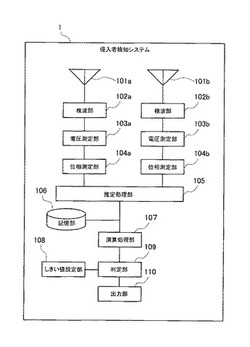
【課題】より広範囲の監視領域において、より高い精度で侵入者を検知する侵入者検知システムを提供する。
【解決手段】侵入者検知システム1であって、複数の受信アンテナ101a、101bと、 受信した電磁波を検波して電圧レベルに変換する検波手段102a、102bと、電磁波の電圧レベルを測定する電圧測定手段103a、103bと、電磁波の位相を測定する位相測定手段104a、104bと、受信アンテナ各々の電圧レベルおよび位相から電磁波の到来方向を推定して記憶手段106に記憶する推定処理手段105と、記憶手段から所定の時間帯の到来方向を読み出し、到来方向の時間変化の特徴量を演算する演算処理手段107と、到来方向の特徴量が閾値を超えるか否かを判別し、閾値を超える場合に侵入者を検知したと判定する判定手段109と、を有する。
(もっと読む)
航空管制用レーダシステム

【課題】離陸直後に出発機が急旋回する等の航路を取った場合にも機影を見失うことなく確認することができ、また滑走路周辺の離発着機情報を捉えることができる航空管制用レーダシステムを提供する。
【解決手段】航空管制用レーダシステムは、空港監視レーダ(ASR)と、二次監視レーダ(SSR)と、精測進入レーダ(PAR)と、所定の出発機についてSSRおよびASRによってそれぞれ得られる出発機情報とこの出発機についてPARによって得られる出発機情報とに基づいて出発機の追尾を行う。また、ASRで得ることができない滑走路周辺の離発着機情報をPARで補間し追尾を行う構成とすることができる。
(もっと読む)
パッシブコヒーレント探索アプリケーションのための、狭帯域事前検出信号を処理するシステムおよび方法
【課題】パッシブコヒーレント探索アプリケーション(PCL)において、狭帯域事前検出信号を処理するシステムおよび方法を提供する。
【解決手段】受信サブシステムは、基準信号およびターゲット信号を統制されていない送信機から受け取る。PCLシステムは、ゼロ−ドップラー消去、直交復調、基準ビーム再生、コヒーレント処理区間選択、パワースペクトル密度推定、クロスアンビギュイティ関数形成などを含み、基準信号はターゲット信号に関してフィルタリングされて、第1出力基準信号が形成される。第1出力基準信号は第1ターゲット信号と結合されて、第1出力ターゲット信号が形成される。次に、出力ターゲット信号は、後続のPCL探索処理オペレーションに用いられる。フィルタは、ターゲット信号と後続のターゲット信号の差に関して更新される。さらに、基準信号およびターゲット信号の相関処理のために2つの経路が用いられる。
(もっと読む)
精測進入レーダ装置
【課題】空中線の切替方式を簡略された系統にて実現可能な精測進入レーダ装置を提供する。
【解決手段】制御部16において、ビーム走査繰り返しごとに、方位空中線装置13の送信部131及び高低空中線装置14の送信部141それぞれの増幅動作を交互にオン/オフし、信号処理部15の信号処理器153に対しA/D変換器151,152それぞれの出力のうちいずれか1つを選択させるようにして、方位空中線装置13及び高低空中線装置14を交互に切り替えるようにしている。
(もっと読む)
測位システム、探知装置、測位装置、測位システムの測位方法、探知装置の探知方法、測位装置の測位方法、探知装置の探知プログラムおよび測位装置の測位プログラム
【課題】目標物を測位するために探知装置と測位装置との間で必要な通信帯域を少なくする。
【解決手段】基準信号送信装置120が目標10に向けて送信波30を発信し、各探知装置100は送信波30が目標10で反射した反射波32を受信する。各探知装置100は受信した反射波32に基づいて基準信号送信装置120が送信波30を送信してから探知装置100が反射波32を受信するまでの時間を算出し、算出した時間のみを特徴情報として測位装置140に送信する。測位装置140は各探知装置100から受信した各特徴情報に基づいて基準信号送信装置120から目標10を経由した各探知装置100までの距離を算出し、算出した距離と基準信号送信装置120の座標と各探知装置100の座標とに基づいて目標10の位置を測位する。
(もっと読む)
レーダ装置
【課題】電力の微弱な目標の探知性能を向上できるレーダ装置を得る。
【解決手段】目標からの反射パルスを受信してA/D変換する受信手段1と、パルスヒット毎の受信、送信信号の相関をとるパルス圧縮手段2と、目標からの直接波とリピータを介した目標からの間接波とが存在するレンジビンを推定し、間接波が存在するレンジビンから直接波が存在するレンジビンへの積分路を決定する積分路探索手段3と、前記積分路に従って、レンジ方向にノンコヒーレント積分を実施するレンジ方向ノンコヒーレント積分手段4と、パルスヒット毎に得たレンジ方向ノンコヒーレント積分手段4の出力をヒット方向にノンコヒーレント積分を実施するヒット方向ノンコヒーレント積分手段5と、ヒット方向ノンコヒーレント積分手段5の積分結果を閾値処理し、閾値を越えたレンジビンに対して目標の検出とみなす閾値手段6とを設けた。
(もっと読む)
車両の走行制御装置
【課題】車両の走行制御において、特に制動時により制動距離を短くし、かつそのときにスピンを防止するためには、車両運動を表す前後速度と左右速度,上下速度,ピッチ角,ロール角,横すべり角の6個の物理量を計測し、各車輪の制動力と各懸架のショックアブソーバの減衰係数を制御する必要がある。このとき、速度や角度を直接計測するセンサを装備する必要がある。
【解決手段】前後速度と左右速度を直接計測するために4つのレーダセンサを使用する。また、上下速度,ピッチ角,ロール角,横すべり角をレーダセンサの出力から間接的に計測。
【効果】3個または4個のレーダセンサを用いることにより、前後速度と左右速度,上下速度,ピッチ角,ロール角,横すべり角の6個の物理量を計測できる。また、2個のレーダセンサを用いることにより、前後速度と左右速度,横すべり角の3個の物理量を計測できる。
(もっと読む)
通信制御方法及びこれを用いたレーダシステム
【課題】 複数のセンサ装置から送信される大量の探知データを効率的に受信する。
【解決手段】 複数のセンサ装置から共通の情報処理装置に対して送信される目標物の探知データの通信量を制御する通信制御方法において、前記共通の情報処理装置は、複数のセンサ装置からそれぞれ送信された探知データを受信する工程と、それらの受信した探知データの通信量から前記複数のレーダ装置と情報処理装置との間の通信負荷を計算し、その通信負荷に応じた通信許可範囲を求める工程と、その求めた通信許可範囲を前記複数のレーダ装置に指示する工程とを備えた。
(もっと読む)
レーダ装置
【課題】2つの検知領域の重複した領域において、一方のセンサの受信信号解析を停止することにより、処理の効率化が可能なレーダ装置を提供する。
【解決手段】第一の検知範囲に電波を送信するための第一の送信部と、第一の検知範囲から電波の反射波を受信するための第一の受信部と、第一の検知範囲に存在する物体を検出するための第一の信号処理部23とを有する遠距離用レーダセンサ21と、第一の検知範囲よりも幅が広く距離が短い第二の検知範囲に電波を送信するための第二の送信部と、第二の検知範囲から電波の反射波を受信するための第二の受信部と、第二の検知範囲に存在する物体を検出するための第二の信号処理部24とを有する近距離用レーダセンサ22と、第一及び第二の信号処理部から供給される情報を統合する処理部25とを備えるレーダ装置であって、第二の送信部は、双方の検知範囲の重複範囲に対し、電波の送信を停止することを特徴とする。
(もっと読む)
超広帯域レーダセンサおよびネットワーク
超広帯域レーダ動きセンサが関心領域に戦略的に配置され、無線アドホックネットワークと通信して、遠隔領域の監視を提供する。動きセンサにインパルスレーダ、心拍及び呼吸監視を組み合わせることでさらに識別を向上させる。  (もっと読む)
(もっと読む)
141 - 150 / 202
[ Back to top ]