
国際特許分類[G01S13/87]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 無線による方位測定;無線による航行;電波の使用による距離または速度の決定;電波の反射または再輻射を用いる位置測定または存在探知;その他の波を用いる類似の装置 (17,599) | 電波の反射または再放射を使用する方式,例.レーダ方式;波長または波の性質が無関係または不特定の波の反射または再放射を使用する類似の方式 (5,353) | レーダ方式,例.一次レーダと二次レーダ,の結合 (202)
国際特許分類[G01S13/87]に分類される特許
131 - 140 / 202
防空システム
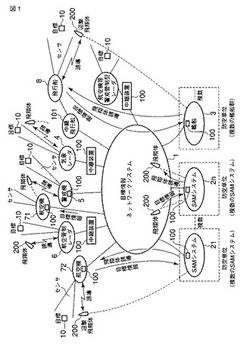
【課題】防衛上の弱点を簡易に克服することの可能な防空システムを提供すること。
【解決手段】センサを搭載する飛行船8を目標情報ネットワークシステム1を介して大規模防空システムに組み込む。またセンサを搭載する航空機(要撃機、警戒機5、民間航空機など)も目標情報ネットワークシステム1を介して大規模防空システムに組み込む。さらには気象レーダ4、航空管制レーダ6や民間使用レーダといった固有の防空システムのレーダを、目標情報ネットワークシステム1を介して大規模防空システムに組み込むようにする。その際、中継装置100を用いて各種レーダ固有のフォーマットのデータを目標情報ネットワークシステム1で使用されるプロトコルに変換し、インタフェースを統一することで目標情報を全ての防空単位間で共有できるようにする。
(もっと読む)
探知測距装置および探知測距プログラム

【課題】レーダー等の複数の探知機で求めた相対距離等に基づいて、単純な計算で正確な相対速度ベクトルを求めることができる探知測距装置および探知測距プログラムを提供すること。
【解決手段】送信した電磁波の被探知物体での反射波を受信することにより被探知物体までの相対距離を測定する第一の相対距離測定手段と、第一の相対距離測定手段と異なる位置に配置され、送信した電磁波の被探知物体での反射波を受信することにより被探知物体までの相対距離を測定する第二の相対距離測定手段と、第一の相対距離測定手段によって測定した相対距離と第二の相対距離測定手段によって測定した相対距離とに基づいて、第一の相対距離測定手段から被探知物体に対する方向又は第二の相対距離測定手段から被探知物体に対する方向に対して任意の角度を成して移動している被探知物体の実速度ベクトルを算出する実速度ベクトル算出手段とを備える。
(もっと読む)
単一のセンサによって位置検出するシステム及び方法
物体の位置を決定する、単一のセンサによる位置検出の強化に関する。いくつかの実施形態において、第1の信号が第1のエミッタから放射され、第2の信号が第2のエミッタから放射される。平面はセンサを用いて観測され、第1の信号および第2の信号のそれぞれが物体によって反射されたあと、第1および第2の信号はセンサによって受信される。応答信号が、第1および第2の信号に基づいて生成され、応答信号は平面における物体の位置を決定するために処理される。 (もっと読む)
センサ移動計画システム
【課題】全ターゲットについて総合的に誤差を小さくするのに適した移動方向を算出できるセンサ移動計画システムを得る。
【解決手段】センサ管理部2は、ターゲットからの信号を受信したセンサから受信波形を獲得する受信波形獲得機能25と、受信波形の観測時刻におけるセンサの位置を獲得する位置情報獲得機能24と、2つのセンサの受信波形を照合してセンサペアのターゲットまでの距離差及び相対速度差を求める受信波照合機能26と、前記距離差及び相対速度差を満たす、ターゲットの観測位置及び観測速度を算出する整合算出機能27とを有し、ターゲット管理部1は、ターゲットの観測位置及び観測速度から将来の時刻におけるターゲットの推定位置及び推定速度を算出する推定機能13を有し、センサ行動算出部3は、各センサについて、位置及び速度誤差改善ベクトルを総合した誤差改善ベクトルを算出し、次の時刻におけるセンサの位置を決定する改善方向決定機能31とを有する。
(もっと読む)
レーダ情報処理装置
【課題】個別レーダは極力小型軽量の装置規模を維持しながら、目標の航跡位置情報の信頼性向上を可能にする。
【解決手段】各レーダと目標との相対距離に応じてS/Nウェイト係数を算出するS/Nウェイト計算部と、各レーダと目標との相対位置に応じて位置ウェイト係数を計算する位置ウェイト計算部と、当該装置の自己位置を標定する自己位置標定部と、スキャンごとに各レーダから受信した目標の位置情報のそれぞれに対して、算出されたS/Nウェイト係数および位置ウェイト係数を乗じ、ウェイト付けされた位置情報を合成し、合成された位置情報を当該装置の自己位置に基づいて絶対的な目標位置に変換する位置計算部を備え、位置計算部で算出された前後のスキャン時の絶対的な目標位置に基づいて追尾処理を行う。
(もっと読む)
車両用周辺監視装置
【課題】車両の衝突の回避又は軽減を図るために、車両の前側方の物体を監視する車両用周辺監視装置を提供することを課題とする。
【解決手段】
左前方監視レーダ110は、車両の左前方に検知範囲を有し、右前方監視レーダ120は、車両の右前方に検知範囲を有する。左前方監視レーダ110の検知範囲の中心軸と車両中心軸とのなす第1の角度は、右前方監視レーダ120の検知範囲の中心軸と車両中心軸とのなす第2の角度よりも大きく設定されている。これは左側通行の道路環境用の設定である。PSC・ECU130は、監視部131と設定部132を有する。監視部131は、左前方監視レーダ110と右前方監視レーダ120から受ける検知信号に基づき車両前側部の物体を監視する。設定部132は、車両の仕向国の交通環境に応じて、左前方監視レーダ110と右前方監視レーダ120の検知範囲と車両中心軸との関係を切り換える。
(もっと読む)
センサシステム
【課題】センサのリソースを管理し、複数のセンサを用いて、目標群を効率的に観測するセンサシステムを得る。
【解決手段】センサ1は、検出部4により目標を検出したとき、目標の観測値と関連するセンサ及びリソースの情報を中央情報処理装置2に通知し、中央情報処理装置2は、検出された目標に関する情報を処理し、目標の中央航跡を生成するとともに、生成された中央航跡に関連するセンサ及びリソースの情報をセンサリソース管理部10により管理し、指示器9により中央航跡に対する指示があったときは、センサリソース管理部10により、中央航跡に関連するセンサ及びリソースに対する指示として、該当センサ1のビーム制御部7に通知し、ビーム制御部7によって送受信部3に対してリソースの電波の照射方向を指示するようにした。
(もっと読む)
物体の表面の動きを検出する方法および装置
本発明は、物体の表面の動きを検出装置によって検出する方法に関し、該物体は、検出プロセス中に静止状態にあり、かつ検出装置に対して壁の反対側の空間内に位置し、かつ1.1よりも大きい比誘電率εrを有する。前記方法は、レーダ信号を送信する段階および物体によって反射されたレーダ信号を受信する段階、ならびに、動きが検出されたならば、加えて、その動きを三次元組み合わせレーダモデルおよびデータモデルにおいて視覚化する段階を含む。本発明はまた、前記方法を実施するための検出装置に関する。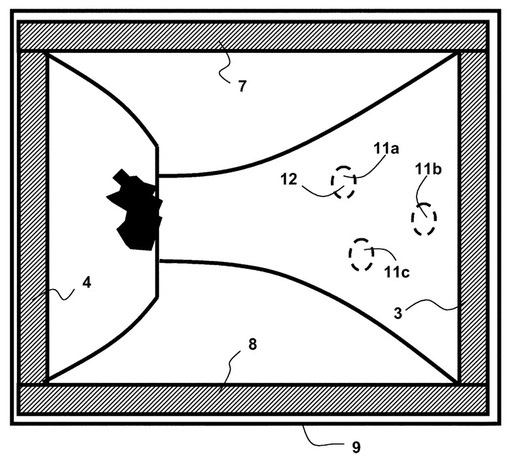
 (もっと読む)
(もっと読む)
侵入者検知システム
【課題】より広範囲の監視領域において、より高い精度で侵入者を検知する侵入者検知システムを提供する。
【解決手段】侵入者検知システムであって、既存の電磁波の受信電圧変動を検出する第1の電磁波センサ1と、電磁波を送信するとともに、当該電磁波が物体に反射した反射波の受信電圧変動を検出する第2の電磁波センサ2と、を有し、前記第1の電磁波センサ1は、前記既存の電磁波の受信電圧変動が第1の閾値を超えた場合に、前記第2の電磁波センサ2を起動し、前記第2の電磁波センサ2は、前記反射波の受信電圧変動が第2の閾値を超えた場合に、侵入者を検知したと判定する。
(もっと読む)
侵入者検知システム、および、侵入者検知方法
【課題】より広範囲の監視領域において、より高い精度で侵入者を検知する侵入者検知システムを提供する。
【解決手段】侵入者検知システム1であって、複数の受信アンテナ101a、101bと、 受信した電磁波を検波して電圧レベルに変換する検波手段102a、102bと、電磁波の電圧レベルを測定する電圧測定手段103a、103bと、電磁波の位相を測定する位相測定手段104a、104bと、受信アンテナ各々の電圧レベルおよび位相から電磁波の到来方向を推定して記憶手段106に記憶する推定処理手段105と、記憶手段から所定の時間帯の到来方向を読み出し、到来方向の時間変化の特徴量を演算する演算処理手段107と、到来方向の特徴量が閾値を超えるか否かを判別し、閾値を超える場合に侵入者を検知したと判定する判定手段109と、を有する。
(もっと読む)
131 - 140 / 202
[ Back to top ]