
国際特許分類[G01S13/60]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 無線による方位測定;無線による航行;電波の使用による距離または速度の決定;電波の反射または再輻射を用いる位置測定または存在探知;その他の波を用いる類似の装置 (17,599) | 電波の反射または再放射を使用する方式,例.レーダ方式;波長または波の性質が無関係または不特定の波の反射または再放射を使用する類似の方式 (5,353) | 電波の反射を使用する方式,例.一次レーダ方式;類似の方式 (1,818) | 物標の相対運動に基づく測定方式 (469) | 速度または軌道の決定方式;運動のセンスの決定方式 (74) | 送信機および受信機が移動物体上に装備されているもの,例.対地速度,ドリフト角,対地軌道を決定するためのもの (47)
国際特許分類[G01S13/60]に分類される特許
11 - 20 / 47
車両移動状況検出装置および車両移動状況検出方法
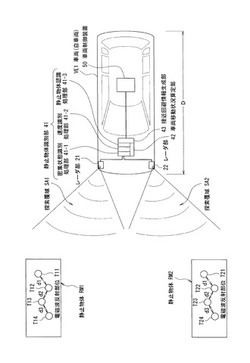
【課題】 自車両の進行に関する方位と対地車速を正確に検出し物体への接近を確実に回避する。
【解決手段】複数の側方監視用レーダ装置21,22を用いて、静止物体を識別する。静止物体RM1,RM2の方位および相対速度の検出値に基づいて空間的に密集して存在する物体を静止物体RM1,RM2と判定し、該判定された静止物体を成す物体(反射点)のうち自車両から最至近に位置する物体T11,T21に関する方位および相対速度の情報に基づいて物体との接近の蓋然性を判断し、車両制御装置50にこの蓋然性低減のための信号を供給する。
(もっと読む)
移動体の速度測定装置及び速度測定方法

【課題】本発明の目的は、ノイズ波の干渉を防止するとともに、車両の上下動や走行路面の凹凸により速度の計測に誤差が生じるのを防止することが可能な移動体の速度測定装置を提供することである。
【解決手段】移動体2の底面2aに設けられ、移動体2の走行方向Xに対して傾斜した送信波3を走行路面20に向けて放射するとともに走行路面20から反射した反射波5を受信するように構成された送受信器8と、送信波3と反射波5との間の周波数偏移量△fから移動体2の速度Vを計算する速度計算手段7とを備えている移動体2の速度測定装置1において、送受信器8は、円偏波を送受信するように構成され、送受信器8は、所定の旋回方向の円偏波を放射し、旋回方向と反対方向の円偏波のみを受信するように構成されている。
(もっと読む)
レーダ装置
【課題】従来の多周波ステップICW方式による車載用レーダは,目標の移動速度にかかわらず複数目標の検出が可能であるが,送信波の漏れ込みを同時に受信すると目標対雑音電力比が小さい遠方の目標を検出することが困難になる。
【解決手段】パルス状送信波を目標に照射し、目標からの反射波を受信機で受信した受信信号中の相対速度0の信号成分を抑圧するフィルタの処理を、受信信号のレンジ番号により目標までの距離が所定値以上の時実施し、所定値未満の時は非実施に切り替えるスイッチを備え、スイッチによる受信機での受信信号またはフィルタ処理後の受信信号を周波数分析手段で周波数分析し、周波数分析結果から目標信号を目標検出手段で抽出し、目標信号から目標までの距離を計測する目標距離算出手段を備える。
(もっと読む)
レーダー装置
【課題】車両に搭載されるレーダー装置に必要とされる性能を満たしながら、短時間で測定を完了することができるレーダー装置を提供する。
【解決手段】制御処理部は、第1の測定方式による測定を開始し、対象物が測定範囲内に存在するとき、対象物との相対位置及び相対速度を測定する。そして、制御処理部は、第1の測定方式によって測定した対象物の相対位置に基づいて再測定範囲を決定する。制御処理部は、再測定範囲を決定すると、再測定範囲のみを第1の測定方式よりも分解能の高い第2の測定方式で測定する。
(もっと読む)
レーダー装置
【課題】低い演算負荷で測定範囲の対象物との相対速度や相対距離などを測定することができるレーダー装置を提供する。
【解決手段】測定範囲内に存在する対象物で反射した反射波のレベルを予め定めた閾値と比較する。そして、予め定めた閾値以上となる反射波のみに基づいて対象物との相対距離として測定し、当該反射波をフーリエ変換処理することによってドップラー周波数を算出し、算出したドップラー周波数に基づいて対象物との相対速度を算出する。
(もっと読む)
コンピュータを援用してセンサデータから物体の運動を計算する方法
本発明は物体に取り付けられたセンサのセンサデータからコンピュータを援用して物体の運動を計算する方法に関する。前記センサデータは様々な時点に検出された、前記物体の周囲にある測定点から成る測定点集合を含んでおり、第1の時点に検出された第1の測定点集合と第2の時点に検出された第2の測定点集合の間での前記物体の運動が求められる。本方法はまず、前記第1および第2の測定点集合から、例えば直線分、円などのような構造要素の形態で構造情報を抽出し、いずれの構造タイプにも割り当てられない測定点とともに記憶する。続いて、同じ構造タイプを有する構造要素間の対応付けを求め、構造要素を互いに写像する変換を実行する。最後に、次のステップにおいて、割り当て不能な測定点と構造要素との対応付けと対応付けられた測定点と構造要素の相互の変換が行われる。本発明の方法により複合スキャンが形成され、この複合スキャンに基づいて物体の固有運動を求めることができる。構造要素および測定点の対応付けは有利には、センサの測定雑音を考慮した統計的手法によって行われる。本方法は例えばロボット、車両、クレーンなどのような自律移動システムの固有運動を算出に使用することが特に適している。 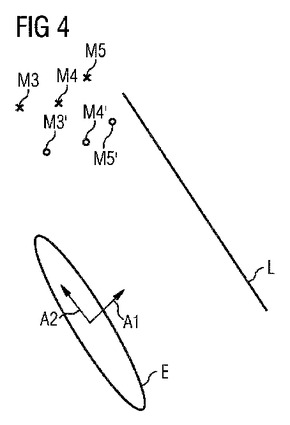 (もっと読む)
(もっと読む)
ミリ波センサによる車速計測装置
【課題】ミリ波センサによる車速計測装置において、取り付け精度がラフであっても、正確に車速を求める
【解決手段】ミリ波センサユニット110は3本のミリ波センサ121,122,123を有しており、それぞれの照射方向の相互間の角度を、予め決めた角度としている。このため、ミリ波センサ121,122,123から出力された検出速度を、演算処理すると、誤差や変動成分を有する計算要素をキャンセルでき、演算処理により正確に車速を求めることができる。
(もっと読む)
レーダデータ処理動作ための方法および装置
【課題】レーダの正確に場所を決定するために衛星航法システム(GPS)およびデジタル標高地図(DEM)とレーダデータを同期することが可能なレーダ試験動作システムを提供する。
【解決手段】飛行試験のレーダデータを利用してレーダシステムを試験するための方法が述べられる。この方法は、測定されたレーダデータをGPSに基づく時間マーカと時間同期させるステップ、時間同期させられたレーダデータの少なくとも一部を記憶するステップ、GPSデータを記憶するステップ、記憶されたGPSデータを処理することでレーダデータを受信したアンテナの物理的位置と対応させるステップ、レーダモデルを供給するステップ、および処理されたレーダモデルデータを記憶されたレーダデータと比較するステップを含む。
(もっと読む)
干渉評価方法、装置、およびプログラム
【課題】現実として起こりうる状況下においても安全性の確保を図ることができる干渉評価方法、装置、およびプログラムを提供する。
【解決手段】複数の物体の位置と各物体の速度を含む内部状態とを少なくとも記憶する記憶手段を備えたコンピュータが、前記複数の物体の位置および内部状態を前記記憶手段から読み出し、この読み出した前記物体の位置および内部状態に基づいて、前記複数の物体の各々が時間の経過とともに取りうる位置の変化を時間および空間から構成される時空間上での軌跡としてそれぞれ生成し、この生成した軌跡を用いることによって前記複数の物体の進路の確率的な予測をそれぞれ行い、この予測した結果に基づいて、前記時空間上で前記特定の物体が取りうる軌跡と前記その他の物体が取りうる軌跡との干渉の程度を定量的に示す干渉度を算出する。
(もっと読む)
移動目標検出装置
【課題】DPCA条件を満足しない場合でも移動目標の検出確率を最大化できる移動目標検出装置を提供する。
【解決手段】移動目標検出装置は、パルス繰り返し間隔で連続して送受信される第1のパルスと第2のパルスを増幅し同期検波して得られる所定数の第1の複素信号と第2の複素信号それぞれからレーダ画像を再生し、一方のレーダ画像を構成する第1の複素信号から複素共役な複素信号を生成し、この複素共役な複素信号と他方のレーダ画像を構成する第2の複素信号とを乗算して検出対象の積の複素信号を生成し、一方、レーダプラットフォームの対地速度から求まる位相偏差を用いて送受信アンテナのDPCA条件からのずれを考慮して積の複素信号の確率密度を算出する。
(もっと読む)
11 - 20 / 47
[ Back to top ]