
国際特許分類[G01S13/86]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 無線による方位測定;無線による航行;電波の使用による距離または速度の決定;電波の反射または再輻射を用いる位置測定または存在探知;その他の波を用いる類似の装置 (17,599) | 電波の反射または再放射を使用する方式,例.レーダ方式;波長または波の性質が無関係または不特定の波の反射または再放射を使用する類似の方式 (5,353) | レーダ方式と非レーダ方式,例.ソーナ,方位測定機,との結合 (221)
国際特許分類[G01S13/86]に分類される特許
101 - 110 / 221
物体検出装置、物体検出方法および物体検出システム
【課題】歩行者のような弱反射物体であっても最初のレーダ探索で検出すること。
【解決手段】物体種別判定部が、車両に搭載されたカメラによって撮像された画像に基づいて物体の種別を判定し、閾値選択部が、判定された種別に対応付けられた所定の閾値を選択し、画像に対応する範囲について照射した照射波に係る反射波の強度が選択された閾値以上であることを条件として物体を検知するように、物体検出装置あるいは物体検出システムを構成する。
(もっと読む)
レーダデータ処理動作ための方法および装置

【課題】レーダの正確に場所を決定するために衛星航法システム(GPS)およびデジタル標高地図(DEM)とレーダデータを同期することが可能なレーダ試験動作システムを提供する。
【解決手段】飛行試験のレーダデータを利用してレーダシステムを試験するための方法が述べられる。この方法は、測定されたレーダデータをGPSに基づく時間マーカと時間同期させるステップ、時間同期させられたレーダデータの少なくとも一部を記憶するステップ、GPSデータを記憶するステップ、記憶されたGPSデータを処理することでレーダデータを受信したアンテナの物理的位置と対応させるステップ、レーダモデルを供給するステップ、および処理されたレーダモデルデータを記憶されたレーダデータと比較するステップを含む。
(もっと読む)
物体、特に危険物を検出する装置
本発明は、物体を検出する装置に関する。この装置は、少なくとも1つのマイクロ波周波数送信器(2)と、少なくとも1つのマイクロ波周波数受信器(1)とを備える。受信器(1)は、送信器(1)を中心として相対的な回転移動を行い、信号は、相対的な回転の円上の受信器のいくつかの位置で個人に向けて送信され、物体の点で反射され、位置において受信器(2)により受信される信号は、処理手段に供給されて、レーダ画像が形成される。受信器(1)および送信器(2)は、非常に低い慣性モーメントを有する円盤(5)上に設置することができる。本発明は特に、人が携帯する武器または爆発物の検出に適用される。 (もっと読む)
物体検出装置
【課題】物体の端部を高精度に特定することができる物体検出装置を提供する。
【解決手段】自車両の前方を走行する他車両の位置情報を一定の周期で繰り返して検出するLIDAR2と、自車両の前方を撮像して自車両の前方を走行する他車両を撮像するカメラ3と、LIDAR2から送信されるLIDAR点列と、カメラ3から送信される撮像画像撮像画像とにより、自車両の前方を走行する他車両の端部を特定して、この他車両の中心位置及び向きを検出するECU4とを備えている。そして、このECU4は、LIDAR点列に近似された物体検出直線αと、撮像画像における矩形領域の左右端の方位直線β1,β2との交点x1,x2を、他車両21の左右端部として特定する。
(もっと読む)
物体検出装置
【課題】反射強度の入力が不安定な場合には、物体の位置情報を推定することができる。
【解決手段】電磁波センサ30及び画像センサ31と、反射強度が所定値より低いか否かを判定する強度判定部21と、車両進行方向における物体Hの速度成分が所定値より低いか否かを判定する速度判定部22と、強度判定部21によって反射強度が所定値より低いと判定され、速度判定部22によって速度成分が所定値より低いと判定された場合には、車両4の移動量Zに基づいて、物体Hと車両4との相対距離Z2を算出する相対距離算出部23と、画像情報から物体Hの方位情報Y2を取得し、方位情報Y2及び相対距離Z2に基づいて物体Hの位置を推定する位置推定部24とを備えることで、画像センサ31で入力した画像情報を用いて、物体Hの位置情報を推定することができる。
(もっと読む)
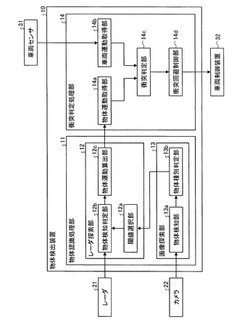
移動物体検出装置および自律移動物体
【課題】混雑環境下での移動物体の精度よいトラッキングが行える移動物体検出装置および移動ロボットを提供すること。
【解決手段】空間の混雑度を測定してトラッキングに利用するもので、方向成分では、混雑度が低ければレーザレンジセンサの計測値を重視し、混雑度が高くなると画像処理結果を重視したセンサフュージョンを行い、得られた移動物体推定方向に対してレーザレンジセンサの計測結果から距離を求める。
(もっと読む)
協調型飛翔体システム
【課題】同時に複数で飛来する目標の中から対象目標を特定した上で、これら対象目標に対して効果的に対処することのできる協調型飛翔体システムを得る。
【解決手段】電波により目標を検知する電波飛翔体と、光波により目標を検知する光波飛翔体とが互いに通信可能な範囲を飛翔しながら、電波飛翔体は、探知した目標の中から対処の対象となる目標候補を抽出して光波飛翔体に通知し、光波飛翔体は、この通知に基づき目標候補を詳細に観測して対処の優先度を評価した上で自身の対処すべき目標を特定し、この目標に向けて誘導飛翔する。一方、電波飛翔体も、光波飛翔体による目標候補に対する評価結果の通知を受けて自身の対処すべき目標を特定し、この目標に向けて誘導飛翔する。
(もっと読む)
情報端末
【課題】位置精度を維持することが困難な環境条件下であっても、精度の高い位置精度を算出し、維持する情報端末を提供する。
【解決手段】位置情報及び信頼度情報を取得する取得手段を備える情報端末であって、前記位置情報及び信頼度情報を取得する取得手段を備えた他の情報端末と交信し、該情報端末の位置情報および信頼度情報を取得又は交換する他端末情報取得手段と、前記他端末情報取得手段より取得した前記位置情報と前記信頼度情報と、前記取得手段により取得した前記位置情報と前記信頼度情報とを用いて、新たな位置情報と信頼度情報を算出する算出手段と、を備え、前記他の情報端末と交信する毎に、前記算出された位置情報と信頼度情報を更新する。
(もっと読む)
周辺監視センサ
【課題】物体の相対位置、相対速度、物体形状などを確実にセンシングする周辺監視センサを得る。
【解決手段】周辺監視センサ1は、ミリ波レーダ2、画像センサ3、信号処理部4を具備し、各センサが検出したデータについてエリア分けを行い、所定のエリア内に存在する物体(ターゲット)については、両センサが取得した情報に基づいて、物体に関する情報を作成する。ミリ波レーダは、遠距離の物体の距離、速度の測定が得意で、画像センサは、物体の幅、角度の測定が得意であるので、それぞれの得意のデータを組み合わせることにより、正確な情報を得ることができる。信号処理部4は、ミリ波レーダが検知した物体の存在場所に画像センサが検知した物体情報を組み合わせて物体面であることを判断する。
(もっと読む)
動態監視システム
【課題】 狭いスペースにおける移動体の位置把握を細かく分けて認識することが難しく、セキュリティ面での不安もあり、狭い空間範囲においても人などの移動体が、いつ、どの方向に移動したかといった位置把握を可能とする。
【解決手段】 移動体が通過するゲート11の通過方向に第1赤外線センサ12並びに第2赤外線センサ13を設置し、第1並びに第2センサは、移動体がゲートを通過するに伴って第1センサのみが作動し、その後第1並びに第2センサの両方が作動し、その後第2センサのみが作動するようにゲートの位置に設置され、移動体が携行するRFIDタグ15からのID信号並びに第1・第2センサからの出力信号に基づいて移動体の動態を監視する。
(もっと読む)
101 - 110 / 221
[ Back to top ]