
国際特許分類[G01S17/66]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 無線による方位測定;無線による航行;電波の使用による距離または速度の決定;電波の反射または再輻射を用いる位置測定または存在探知;その他の波を用いる類似の装置 (17,599) | 電波以外の電磁波の反射または再放射を使用する方式 (1,905) | 電波以外の電磁波を使用する追跡方式 (53)
国際特許分類[G01S17/66]に分類される特許
21 - 30 / 53
目標捕捉追尾装置
【課題】2次元画像の視野内に存在する目標の3次元形状を取得する際の視軸設定及び対象視野の自由度を向上させ、効率よく目標を追尾する目標捕捉追尾装置を得る。
【解決手段】2次元画像情報を取得するセンサを有する赤外線撮像部と、3次元形状情報を取得するセンサを有するレーザレーダ部とを分離した構成とし、2次元画像情報の視軸及び視野と、3次元形状情報を取得する方向及びその走査範囲とをそれぞれ独立に設定可能にする。そして、赤外線撮像部の視軸は自身の移動方向に一致させつつ、レーザレーダ部の視軸は、目標を捕捉する際には、赤外線撮像部の視軸の方向に一致させるとともに、赤外線撮像部の視野の方位角範囲に一軸走査してその3次元形状情報を取得する。また、目標を追尾する際には、目標の方向に視軸を設定し、これを基準とする限定された範囲を一軸走査して目標の3次元形状を取得する。
(もっと読む)
追跡方法、および、レーザートラッカを有する測定システム
反射器(17)が設けられた標的(9)が、レーザートラッカ(10)を含む測定システムにおいて追跡される。反射器(17)は、通常追跡モードにおいて追跡ユニット(11)により追跡され、特別追跡モードにおいて概観装置(13)により追跡される。追跡ユニット(11)の検出領域と概観装置(13)の検出領域との間にある検出領域を有する捕捉ユニット(12)も存在する。標的(9)を追跡ユニット(11)によっては検出できないが、捕捉ユニット(12)により検出可能である場合、追跡ユニット(11)の方向は、捕捉ユニット(12)による測定に従って制御される。そして、標的(9)を追跡ユニット(11)によっては検出可能である場合、通常追跡モードへの遷移が開始される。標的(9)を概観装置(13)のみにより検出可能である場合、追跡ユニット(11)の方向は、概観装置(13)の測定に従って制御される。  (もっと読む)
(もっと読む)
誘導装置及び目標判定装置

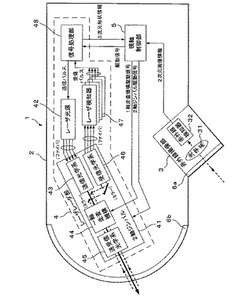
【課題】飛しょう体に搭載され、レーザ光を利用し目標の3次元画像と強度画像を生成してデータベースの格納データと比較することで、目標と背景を高精度で分離可能な誘導装置を提供する。
【解決手段】飛しょう体1に搭載する誘導装置10において、レーザ光を発振する装置とレーザ光を検出する装置を備え、目標2を含む範囲を誘導装置10から照射するレーザ光で走査することによって走査範囲から反射したレーザ光を受光及び検出し、検出した信号から走査範囲のレーザ光の反射強度分布及び3次元形状を算出して強度画像及び3次元画像を生成し、生成した強度画像と3次元画像を利用した信号処理により、目標を検出する。
(もっと読む)
追尾式レーザ干渉測長計
【課題】入射面のゴミの影響を受け難く、基準球の表面の傷に対してロバストであり、基準球の局所的な真球誤差の影響を受け難くする。
【解決手段】固定位置に配設された透明な基準球614と、移動体に配設された再帰逆反射体(620)と、基準球の中心を中心として回動するように設計されたキャリッジ630と、キャリッジに固定配設され、再帰逆反射体と基準球の間でレーザビーム(642)を往復させる光学系を含み、再帰逆反射体と基準球の間の距離を干渉測長する測長手段(640)と、キャリッジに固定配設され、再帰逆反射体の入射光と反射光の光軸のずれ量に応じた信号を出力する追尾用位置検出手段660と、光軸のずれ量がゼロとなるようにキャリッジの回動を制御する制御部670とを備えた追尾式レーザ干渉測長計において、基準球に入射されるレーザビームが、基準球の中心Oに焦点を結び、入射側と反対の内側球面で反射されるようにする。
(もっと読む)
周波数量子もつれ光子の生成及び検出
紫外線レーザはコヒーレント光を発生し、このコヒーレント光は下方変換されて周波数量子もつれ光子を生成する。量子もつれ光子の各対に関して、第1光子は第1光路に沿って、第2光子は第2光路に沿って、それぞれ伝送される。第1検出器は、第1光路に沿って伝送されるこれらの光子を検出し、第2検出器は、第2光路に沿って伝送されるこれらの光子を検出する。この検出は、シングルフォトン領域で行なわれる。同時計数を検出器の出力に対して行ない、この同時計数には、第1及び第2検出器の出力の立ち上がりエッジを時間窓内で比較することが含まれる。  (もっと読む)
(もっと読む)
レーザー照射装置
【課題】 従来、電波センサーでは低高度を接近する目標を捕捉することが難しく、光学センサーでは遠距離の脅威を捕捉することが難しいため、低高度及び超音速で接近してくる目標を遠距離で対処することができないという問題があった。
【解決手段】 高出力連続波レーザー光をパルス変換器によってパルス化し、レーザー放射器から遠方より接近する目標に対してパルス化されたレーザー光を照射して、反射レーザー光を光学センサーで受信する。この受信信号の解析情報を元にレーザー放射器を駆動して目標を追尾し、目標が所定距離に接近した際にパルス動作を停止して、追尾目標に対し高出力連続波レーザ光を照射することにより、低高度目標に対して遠距離で対処することができる。
(もっと読む)
レーザトラッカ
【課題】簡単な構成で要求される性能を維持しつつ、測定が中断しても高精度な測定を行うことができ、使い勝手の良いレーザトラッカを提供する。
【解決手段】本体からターゲット106迄の絶対距離を測定する光コム距離計201と、モータ113、115を用いてレーザ光3の方向を変えることのできる2軸の回転機構と、ターゲットと本体との相対的な角度を測定する2軸分の角度測定手段114、116と、光コム距離計が出力する絶対距離のデータと角度測定手段が出力する2軸分の角度データから、ターゲットの空間座標を算出するデータ処理装置110と、ターゲットに入射するレーザ光の光軸と直角方向にターゲットが移動すると、この移動量と移動する方向に応じた信号を出力する光位置検出手段109と、光位置検出手段から出力された信号を用いて、移動量がゼロになるように2軸の回転機構を制御する制御手段111、112とを備える。
(もっと読む)
追尾式レーザ干渉計
【課題】追尾式レーザ干渉計の追尾速度を高速化する。
【解決手段】固定配設された回転中心の回りを回動するように配置されたキャリッジ22上に設けられたレーザ干渉計24からレトロリフレクタ10に向けてレーザビームを照射し、戻り方向に反射されたレーザビームの干渉を利用してレトロリフレクタの変位を検出すると共に、レーザビームの光軸の位置の変化として検出される追尾偏差を用いてトラッキングを行なうようにキャリッジの回動を制御する追尾式レーザ干渉計において、キャリッジの相対角変位Θaに変換係数Kmのノミナル値Kmnを乗じた信号と追尾偏差ΔLfを加算してレトロリフレクタの変位の推定値Lc*を算出する手段と、レトロリフレクタの変位の推定値Lc*に0<K<1なる補償ゲインKfを乗じ、更にこれを微分してキャリッジの目標速度の補償信号Vfを生成する手段と、追尾偏差ΔLfに追尾制御系のゲインKpを乗じた信号に補償信号Vfを加算してキャリッジの目標速度Varを生成する手段とを持つサーボ機構を備える。
(もっと読む)
監視装置
【課題】測距装置を併設することなく、監視を続けながら測距を行うことの可能な監視装置を提供することを目的とする。
【解決手段】送光部11から射出されたレーザ光が物体に到達し、物体により反射された反射光が到達するタイミングに合わせてシャッタを開閉させる監視制御を行うとともに、該監視制御を行っている期間中に、物体の距離情報を取得するタイミングでシャッタを開閉させる測距制御を行う監視装置を提供する。
(もっと読む)
追尾式レーザ干渉計
【課題】簡単な構成で、基準球支持部に対する各種配線、光ファイバ等の接触による張力や摩擦力による影響を無くして、高精度な測定を可能とする。
【解決手段】測定の基準を成す基準球10と、該基準球を支持する基準球支持部12と、前記基準球の周囲を2軸回転運動する、第一軸回転機構21及び第二軸回転機構22でなる回転機構部20と、該回転機構部に搭載されたレーザ干渉測長機30を有し、ターゲットとなる再帰的反射体(40)からの戻り光の情報に基づきターゲットを追尾して、基準球の中心座標を基準とし、回転機構部に載ったレーザ干渉測長機からの出射光と戻り光の光軸が平行となる再帰的反射体との距離を測定する追尾式レーザ干渉計において、装置の基部(14)に設置される第一軸回転機構21の内周部を中空とし、該中空に、前記基準球支持部12との隙間を介して筒状カバー60を設け、その外部に第二軸回転機構22への配線を通過させる。
(もっと読む)
21 - 30 / 53
[ Back to top ]