
国際特許分類[G01S17/66]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 無線による方位測定;無線による航行;電波の使用による距離または速度の決定;電波の反射または再輻射を用いる位置測定または存在探知;その他の波を用いる類似の装置 (17,599) | 電波以外の電磁波の反射または再放射を使用する方式 (1,905) | 電波以外の電磁波を使用する追跡方式 (53)
国際特許分類[G01S17/66]に分類される特許
41 - 50 / 53
目標位置照準装置および目標位置照準方法
【課題】航空機の飛行中にタレット本体の表面に受ける外力や空力の影響を低減させることにより、目標位置照準装置として性能劣化を極力防止する目標位置照準装置および目標位置照準方法を提供すること。
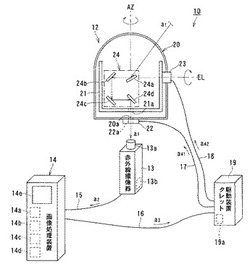
【解決手段】目標位置照準装置10は、内部に光学系機器が収納され、目標物側から照射される赤外光a1を受光するタレット12と、当該タレット12の光学系機器24を経由して導出された赤外光a1を入射して画像データ信号a2を生成するタレットと離間して設けられた赤外線撮像器13と、画像データ信号a2を入力して、画像データ信号a2に含まれる目標物Tの位置データを補正する補正データ信号a3を生成する画像処理装置14と、補正データ信号a3を入力し、タレット12の向きを補正する補正信号a41およびa42を生成し、タレット12側に出力して、タレット12の向きを補正するタレット駆動装置19とを備える。
(もっと読む)
レーザートラッカーを用いたトラッキング方法及び測定システム
本発明による測定システムは、レーザートラッカー(10)、反射体(12)によりマーキングされた目標点、監視機器(13)及び計算・制御ユニット(14)を有する。レーザートラッカーは、測定光線(M)を出射して、その光線を反射体が反射し、そのことを、レーザートラッカー(10)と反射体(10)間の距離を求めるために利用している。監視機器は、測定光線(M)に対して相対的な既知の位置及び向きを有し、有利には、監視カメラである。測定システムは、測定光線(M)によって反射体(12)を追跡するように構成されている。この場合、標準的なトラッキングモード(A)では、反射体(12)によって反射されて来た測定光線の検出から、測定光線(M)の向きを制御するための測定量を導き出す。測定光線が、反射体の方向を向いていない、即ち、反射体によって反射されず、そのためレーザートラッカーが、反射されて来る測定光線を検出することができない場合、システムは、測定光線(M)の向きを制御するための測定量を監視カメラ(13)の画像(20)から導き出す特殊なトラッキングモード(M)に切り換わる。 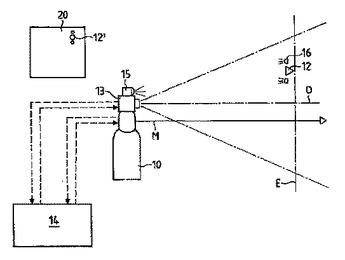 (もっと読む)
(もっと読む)
一体型レーザ/赤外線前方監視光学装置

【課題】FLIR/レーザーに基づく目標化および撮像システムにおいて、IRのLOSとレーザーのLOSとの固定された整合誤差およびダイナミック整合誤差を低減することにより、当該エリア内の目標を認識する能力を大幅に改善する。
【解決手段】IRのLOSとレーザーのLOSの間の固定された整合誤差は、改善された内部ボアサイトモジュール(図10)および対応するボアサイト方法により低減される。ダイナミック整合誤差はレーザーエネルギーおよびIRエネルギーの双方に対する単一ピッチ(405)ベアリングおよび共通ピッチ/ヨーアフォーカル(401)を使用する光電気サブシステムによって低減される。
(もっと読む)
一体型レーザ/赤外線前方監視光学装置
【課題】FLIR/レーザーに基づく目標化および撮像システムにおいて、IRのLOSとレーザーのLOSとの固定された整合誤差およびダイナミック整合誤差を低減することにより、当該エリア内の目標を認識する能力を大幅に改善する。
【解決手段】IRのLOSとレーザーのLOSの間の固定された整合誤差は、改善された内部ボアサイトモジュール(図10)および対応するボアサイト方法により低減される。ダイナミック整合誤差はレーザーエネルギーおよびIRエネルギーの双方に対する単一ピッチ(405)ベアリングおよび共通ピッチ/ヨーアフォーカル(401)を使用する光電気サブシステムによって低減される。
(もっと読む)
光波妨害装置の目標捕捉追尾装置
【課題】 背景画像を誤って捕捉し追尾しないように、より適切に目標とする光波シーカ搭載誘導飛翔体を捕捉し追尾する。
【解決手段】 初期目標捕捉後、赤外線画像から撮像視野内の熱量ヒストグラムを計測して(S1)視野内の熱源を観測し(S2)、目標のロケットプルームによるパッシブ画像を背景画像と区別して検出して、初期目標として捕捉する(S3)。続いて、各画像のヒストグラム計測結果から、各画像のパッシブ捕捉目標の同一性を判断し(S4)、同一目標のパッシブ画像の領域中心を追尾するように撮像方向を制御する(S5)。続いて、上記熱量ヒストグラムから光波シーカのレーザ反射光によるアクティブ画像を背景画像と区別して新目標として捕捉し(S7)、各アクティブ画像の捕捉目標の同一性を判断し、背景画像が変化する状況下で同一目標として追尾する(S8)。
(もっと読む)
追尾式レーザ干渉計
【課題】回転機構のランアウトに対してロバストで、且つ、基準球表面の疵や埃の影響を受け難くい追尾式レーザ干渉計。
【解決手段】追尾式レーザ干渉計において、固定配設された基準球212、基準球の中心を中心として回動するようにされたキャリッジ214、キャリッジ上に設けられたレトロリフレクタの変位に応じた変位信号を出力するレーザ干渉計216、基準球と変位計との相対的な変位に応じた変位信号を出力する変位計218、219、変位計が出力する変位信号、レーザ干渉計が出力する変位信号とから基準球のレトロリフレクタの変位を算出するデータ処理装置250、レトロリフレクタからレーザ干渉計に戻ってくるレーザビームが、その光軸と直交する方向にずれたとき、そのずれ量に応じた位置信号を出力する位置検出手段238と位置検出手段からの位置信号に基づいて、ずれ量がゼロになるようにキャリッジの回動を制御する制御手段252とを備える。
(もっと読む)
追尾照準装置
【課題】本発明は、3軸ジンバル構造を採用して天頂ロックを確実に回避することを前提として、装置の大型化を抑制するとともに、光軸調整の簡素化を図って調整誤差の減少化を得られ、追尾照準精度の向上化を図れる追尾照準装置を提供する。
【解決手段】被取付け体に取付け固定される装置ベース1と、この装置ベースに回転自在に支持されるジンバル部2との組み合せからなり、内部に、レーザ発生器7と、照明光学系8と、画像センサ14および、3軸ジンバル構造のクーデ光学系10を収容し、移動する目標物を追尾して画像を取り込み、かつレーザ光の照準を合わせて目標物を照射する追尾照準装置において、装置ベースに、レーザ発生器と、画像センサを配置するとともに、画像センサの光軸と、レーザ発生器から発振されるレーザ光の光軸とを、クーデ光学系における1軸の調整で一致させる光軸調整機構20を具備する。
(もっと読む)
光伝送システムおよび光伝送方法
【課題】ターゲットに対して照射するレーザ光の照射精度を向上させると共に、光伝送システム全体の小型軽量化を図る。
【解決手段】光伝送システム10は、航空機等の飛翔体に設置される基台11と、この基台11上にアジマス方向に回動自在に支持されるシステム本体12とから構成される。 基台11は、アジマス方向回動軸受13と、光発生・送出装置14と、光軸補正データ生成手段15とを備える。 アジマス方向回動軸受13には、メインレーザ光mおよびガイドレーザ光gを導光する軸孔13aが設けられる。 光発生・送出装置14は、メインレーザmを生成する。 光軸補正データ生成手段15は、光検出器20と画像処理装置21と、光軸補正処理装置22とを備えている。
(もっと読む)
移動再帰反射器を測定する絶対距離計
増分干渉計を使用することなく、移動外部再帰反射器またはそのほかの移動目標表面の1またはそれを超える次元の絶対距離測定および/または表面走査および/または座標測定が可能なレーザ・デバイスおよび方法。  (もっと読む)
(もっと読む)
位置判定及びモーショントラッキング
プロセッサベースのシステム(301)において使用される位置判定及びモーショントラッキングのためのシステム及び方法。実施形態は、固定点(132)を中心として少なくとも1つの方向に動く方向転換器(130)と、サーチビーム(131)を位置ビーム(141)として反射する対象物(101)と、方向転換器の向きから少なくとも1つの角度位置を判定する論理回路(160)と、固定点(132)からの対象物の距離(104)を判定する論理回路(161)とを含む場合がある。  (もっと読む)
(もっと読む)
41 - 50 / 53
[ Back to top ]