
国際特許分類[G01S17/66]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 無線による方位測定;無線による航行;電波の使用による距離または速度の決定;電波の反射または再輻射を用いる位置測定または存在探知;その他の波を用いる類似の装置 (17,599) | 電波以外の電磁波の反射または再放射を使用する方式 (1,905) | 電波以外の電磁波を使用する追跡方式 (53)
国際特許分類[G01S17/66]に分類される特許
11 - 20 / 53
目標追跡装置及び目標判定方法
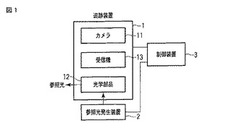
【課題】目標エコーを確実に追跡可能な目標追跡装置を提供すること。
【解決手段】本実施形態に係る目標追跡装置は、参照光を発生する参照光発生装置2と、参照光を目標に向け照射する光学部品12と、参照光による目標からの反射光を撮像面に結像させることにより目標エコーを撮像するカメラ11と、カメラ11により撮像された画像上で目標候補を抽出し、カメラ11の視軸と光学部品12の角度とに基づいて、画像上での目標エコーの出現予測範囲を算出し、出現予測範囲にある目標候補を目標エコーと判定する制御装置3とを備える。
(もっと読む)
追尾式レーザ干渉計および追尾式レーザ干渉計の制御方法

【課題】 測定される距離の測定誤差を容易に低減できる追尾式レーザ干渉計および追尾式レーザ干渉計の制御方法を提供する。
【解決手段】 追尾式レーザ干渉計1は、移動体に取り付けられたレトロリフレクタRで反射された測定光L21を受光する検出器222を備える追尾用光学部22を有する本体2と、追尾用光学部22からの受光信号に基づいて本体2の姿勢を制御し、本体2にレトロリフレクタRを追尾させる制御手段3とを備えるものであって、制御手段3は、レトロリフレクタRに入射する測定光L2とレトロリフレクタRで反射される測定光L2とを平行とするように検出器222で受光される測定光L21の目標位置Q2を設定する目標位置設定部32と、本体2の姿勢を制御し、レトロリフレクタRで反射された測定光L21を目標位置Q2に入射させる姿勢変更部33とを備える。
(もっと読む)
位置検出システム
【構成】位置検出システム100は、LRF12およびメモリ22を備え、検出領域(F)内に存在する人間をLRF12によってセンシングすることで位置を検出し、検出された位置データをメモリ22のバッファに蓄積する。また、人間Aおよび人間Bの位置履歴データに基づいて、すれ違い行動が行われていると判断された場合、すれ違いモデル毎にすれ違い軌跡CTと一致する確率Pが算出される。そして、プロセッサ20は、確率Pの値が最も大きいすれ違いモデルCMに従って人間Bの移動方向を決め、第1所定時間後の人間Bの移動距離を求めることで、人間Bの将来位置を算出する。
【効果】すれ違い行動が行われると、そのすれ違い行動と最も似ているすれ違いモデルを選択することで、人間の将来の位置を予測することができる。
(もっと読む)
自動目標検出を有する座標測定装置
Notice: Undefined index: from_cache in /mnt/www/gzt_ipc_list.php on line 285
距離測定装置及び飛翔体位置測定装置
【課題】 鳥類等の飛翔体までの距離及び位置を簡易に測定する。
【解決手段】 レーザー距離計10の接眼レンズ11にリレーレンズ20を介してビデオカメラ30を装着した構成であり、レーザー距離計10の接眼レンズ11に表示される飛翔体の画像をビデオカメラ30のモニタ画面31に表示させることができる。従って、観測者は、レーザー距離計10の接眼レンズ11をのぞき込み、アイポイント位置を保ちながらレーザーを照射する必要はなく、ビデオカメラ30のモニタ画面31を見ながら、レーザー距離計10を操作して飛翔体を追尾でき、飛翔体を追尾しながらのレーザー照射作業が容易となる。
(もっと読む)
物体検出装置
【課題】 本願は、物体を精度良く検出することができる物体検出装置を提供する。
【解決手段】 本願の物体検出装置10は、2次元走査型の距離計測センサ12と、距離計測センサの出力に基づいて物体を検出する演算装置と、を備えている。距離計測センサ12は、計測対象となる物体36に応じて設定された測定高さH0より低い位置HLに設置されている。また、距離計測センサ12は、距離計測センサ12がセンサ正面を計測するときの距離計測方向θが水平面Pに対して斜め上方を向くように設置されている。
(もっと読む)
追尾式レーザ干渉測長計
【課題】回転機構の回転角度を適切に取得することができる追尾式レーザ干渉測長計の提供。
【解決手段】追尾式レーザ干渉測長計1は、第1の再帰反射体としての測定基準器2と、被測定物Wに取り付けられる第2の再帰反射体としてのターゲット3と、測定基準器2にレーザ光源から出射される光を導くとともに、測定基準器2にて反射された光を出射する本体部4と、測定基準器2を中心として本体部4を回転させる回転機構5と、回転機構5を制御する制御装置6とを備える。本体部4は、測定基準器2にて反射された光を受光し、受光した光の位置を検出する二次元PSDを備える。制御装置6は、回転機構5の回転角度を取得する角度取得部63と、二次元PSDにて検出される光の位置に基づいて、角度取得部63にて取得される回転機構5の回転角度を補正する角度補正部64とを備える。
(もっと読む)
干渉計
【課題】移動体までの距離を安全に測定することができる干渉計を提供すること。
【解決手段】干渉計1Aは、干渉計1Aから射出される光の光量を調整可能に構成された調光手段3Aと、受光手段47,49の受光量が所定の第1閾値以下か否かを判定する第1判定手段と、第1判定手段が、受光量が第1閾値以下と判定した場合、調光手段3Aに、干渉計1Aから射出される光の光量の低減を命じる低減信号を出力する低減信号出力手段とを備える。調光手段3Aは、低減信号が入力された場合、光源から射出される光の光量を低減させる。従って、干渉計1Aが反射体101を見失ってしまった場合、調光手段3Aが干渉計1Aから射出される光の光量を低減させることとなるので、干渉計1Aの周囲で作業する人に干渉計1Aから測定光が照射されてしまうことを防止でき、移動体2までの距離を安全に測定できる。
(もっと読む)
レーザ照準機構
レーザトラッカまたはレーザスキャナとともに使用するための照準デバイスは、トラッカまたはスキャナ制御システムとトラッカまたはスキャナ装置とを含むとよい。トラッカ装置は、レーザを操作する機構へトルクを印加するように構成された複数のモータと、機構の角度位置についてのフィードバック情報をトラッカ制御システムへ送るように構成された複数の角度エンコーダとを含むとよい。トラッカまたはスキャナ制御システムは、照準デバイスが手動調節モードで作動している時にトラッカまたはスキャナ制御システムが複数のモータを制御してユーザにより引き起こされた移動の方向と反対に機構へトルクを付与するように構成されるとよい。 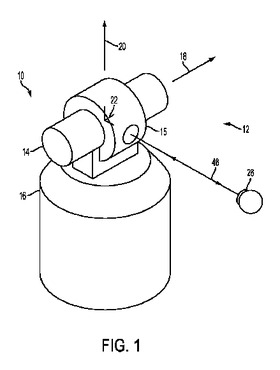 (もっと読む)
(もっと読む)
光スイッチを備える絶対距離計
【課題】ドリフトをほとんど発生させることなく、動いているターゲットを正確に測定するADMを提供する。
【解決手段】絶対距離計(ADM)は、放出光を放出する光源を含み、スイッチ制御信号に応答して少なくとも2つの位置間で切り換わる少なくとも1つの光スイッチを有するファイバ交換網200を含み、これらの位置の第1の位置は放出光がファイバ交換網からターゲットの方へ放出され、測定光としてファイバ交換網内へ後方反射される測定モードにし、これらの位置の第2の位置は光ビームがファイバ交換網内の基準光を含む基準モードにする。ADMは、時間的に間隔を空けて多重化した形で測定および基準光を検出し、測定ビームおよび反射された光ビームの電気信号を提供する単一チャネル検出器、それに応答した電気信号を提供する単一チャネル信号処理装置、その電気信号を処理してターゲットまでの距離を決定するデータ処理装置400とを含む。
(もっと読む)
11 - 20 / 53
[ Back to top ]