
国際特許分類[G01S5/14]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 無線による方位測定;無線による航行;電波の使用による距離または速度の決定;電波の反射または再輻射を用いる位置測定または存在探知;その他の波を用いる類似の装置 (17,599) | 2またはそれ以上の方向線,位置線測定を座標づけすることによる位置決定;2またはそれ以上の距離測定を座標づけすることによる位置決定 (2,996) | 電波を使用するもの[1,2010.01] (2,630) | 互いに離れた複数個の既知位置の点からの絶対距離の測定によるもの (1,802)
国際特許分類[G01S5/14]に分類される特許
701 - 710 / 1,802
GPS受信装置
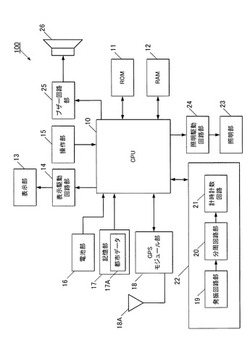
【課題】自装置の現在位置を複数の都市から検索する際の、CPUの負担を軽減することのできるGPS受信装置を実現すること。
【解決手段】自装置の現在位置情報を取得した後に、都市名データ、緯度データ・経度データ、時差データ、インデックスを互いに対応付けて複数組記憶している記憶部をアクセスし、取得した現在位置情報に対応するインデックスを作成し(S201)、この作成したインデックスが、記憶部に記憶されているインデックスに一致するか否かを判別し(S202)、この判別結果に基づいて、記憶部に記憶されている複数の都市の緯度データ・経度データの中から、取得されている現在位置情報と一致する都市の位置情報、またはそれに近い都市の位置情報の検索を行う(S215)。
(もっと読む)
無加入ワイヤレス・デバイス位置検出

ワイヤレス・デバイスの位置検出技法は、ワイヤレス・デバイスが、ワイヤレス・ネットワーク内部において地理的に分散する基地局が送信した信号の測定を行うことを伴う。これらの送信機について、送信機位置、送信信号電力、信号伝搬、および送信信号タイミングのような、何らかのキー・サイト情報が分かっていれば、位置検出対象デバイスによるこれら送信信号の測定値を用いて、デバイスの位置を判定することができる。この例では、デバイスと位置検出ノードとの間における情報交換の全ては、位置推定プロセスにおいて用いられる信号を供給するワイヤレス・ネットワークが提供しないデータ・リンクによって促進される。したがって、デバイスがワイヤレス・ネットワークの一部でない場合でも、ネットワークによってワイヤレス・サービスを提供されていない場合でも、更にはワイヤレス・ネットワークに信号を送信する能力を有していない場合でも、デバイスが行うダウンリンク信号測定に基づいて、デバイスの位置を検出することができ、位置検出を容易にするために、ワイヤレス・ネットワークの通信資源を消費することはない。 (もっと読む)
無線通信端末及び測位方法
【課題】無線端末装置が基地局のサービスエリア外に位置する場合であっても位置精度の向上を図ることが可能な無線通信端末及び測位方法を提供する。
【解決手段】本発明の無線通信端末は、まず通信の候補となる基地局を捕捉して自端末の概算位置P11を求め、捕捉に成功した捕捉成功基地局(基地局BS1)が1つの場合に、先に求めた概算位置P11を軌道情報管理装置に送信して、概算位置に応じたGPS衛星の軌道情報を取得し、この軌道情報に基づいてGPS衛星を捕捉する。ここで、GPS衛星の捕捉に失敗した場合に、本発明の無線通信端末は、基地局BS1のサービスエリアR1外に少なくとも1つの新たな概算位置P21〜P25,P31〜P37,P41〜P49を設定し、設定した新たな概算位置とGPS衛星の軌道情報とを用いてGPS衛星を捕捉する。
(もっと読む)
受信回路、ノイズキャンセル回路及び電子機器
【課題】ノイズキャンセルにおいて、高周波信号の引き回しによる信号の漏出を削減すること。
【解決手段】GPSアンテナ10から出力された信号S1が、乗算部70において、局部発振信号生成部50で生成された局部発振信号S21と乗算されることで、中間周波数の信号S2にダウンコンバートされる。また、携帯用電子回路からの発生信号S11が、サンプル回路部130において、発生信号S11の周波数より低い周波数のサンプルクロック信号S22でサンプリングされる。そして、サンプリングされた信号が、減衰部140において減衰されることでキャンセル信号S12が生成され、加算部80において、乗算部70から出力された信号S2に加算されることで、受信信号に重畳されたインバンドのノイズがキャンセルされる。
(もっと読む)
情報処理端末およびコンピュータプログラム
【課題】 GPS衛星からの電波を受信して現在位置を判定し、判定した位置によって使用する機能を自動的に切り換えることが可能な、新規かつ改良された情報処理端末およびコンピュータプログラムを提供すること。
【解決手段】 機能要求を受信する要求受信部112と;GPS信号を受信するGPS信号受信部102と;GPS信号から情報処理端末の現在地の緯度および現在地の経度を測定する現在地測定部122と;情報処理端末で使用する機能に関する定義情報が記録されている定義情報記録部118と;定義情報並びに現在地測定部で測定した現在地の緯度および現在地の経度に基づいて機能の使用可否の判定を行う機能判定部116と;機能判定の結果に基づいて複数のデータ領域の内の一のデータ領域との間でデータの読み書きを行うデータ読み書き部120と;を含むことを特徴とする、情報処理端末100が提供される。
(もっと読む)
ICタグリーダーとGPSを併用したICタグ位置情報取得システム
【課題】 野外の広範囲に及ぶエリア内にあって、検索対象者の動向を把握する事が出来る安価な位置情報検索システムを得る。
【解決手段】 検索対象者20が携帯する非接触アクティブ型ICタグ21と、この非接触アクティブ型ICタグ21の情報を読み取る固定式ICタグリーダー1と、この固定式ICタグリーダー1が読みとる事が困難なエリアをカバーするためのICタグリーダー12と位置情報を測位するGPS受信機11を備えた位置情報取得装置10を有する移動体と、固定式ICタグリーダー1と位置情報取得装置10のデータを、蓄積するシステムサーバー30を備えたことを特徴とするICタグリーダーとGPSを併用したICタグ位置情報取得システムを備える。
(もっと読む)
ナビゲーションシステム、およびGPS測位解精度判定方法
【課題】マルチパスやCWノイズ等の影響によるGPS測位解の精度低下を検知する。
【解決手段】複数のGPS衛星を捕捉・追尾し測位を行ってGPS測位解を取得するGPS測位解取得手段と、自律航法のための自律航法情報を出力する情報出力手段と、該出力された自律航法情報と該GPS測位解との比較結果に基づいて所定の参照値を算出する参照値算出手段と、該算出された所定の参照値と、該測位の過程で得られるクロック・オフセット値との差分を算出する差分算出手段とを具備し、該算出される差分に基づいて該GPS測位解の精度を判断するナビゲーションシステムを提供する。
(もっと読む)
信号同期装置及び同期方法
【課題】GPS信号を用いた同期において、GPS信号を受信できなくなった場合でも同期を維持する。
【解決手段】GPS信号とクロック発生器10のフィードバック信号との差分に基づいてクロック発生器10を補正する信号同期装置であって、GPS信号の喪失状態を検出するGPS信号喪失検出部21と、クロック発生器10が設置された地点の環境情報を検出する環境情報検出部22と、前記環境情報と前記補正値とを関連付けて記憶する補正情報記憶部30と、GPS信号が喪失した場合に、検出した環境情報に対応する補正値をクロック発生器10の補正値として取得する補正値情報読出部24とを備える。
(もっと読む)
GPS受信装置およびGPS受信方法
【課題】 特定のタイミングを狙ってGPS信号を測定することにより、測位を完了するまでの平均時間を短縮する。
【解決手段】 現在時刻を計時する時計部7、GPS衛星から送信される航法メッセージを構成する第1番目のサブフレーム#1乃至第5番目のサブフレーム#5のうち任意の1個のサブフレームの送信開始時刻およびサブフレーム番号を取得する高周波処理部2および衛星信号処理部4、時計部7から得られる現在時刻と取得された送信開始時刻およびサブフレーム番号とに基づいて測定開始時刻を決定する測定開始時間管理部6、測定開始時間管理部6によって決定された測定開始時刻から取得されたサブフレーム#1乃至サブフレーム#3のデータに基づいて現在位置を検出する位置演算部5を備えている。
(もっと読む)
相関演算制御回路及び相関演算制御方法
【課題】 受信信号とレプリカコードとの相関値を算出する相関処理において、相関値の積算の飽和が検出されたときに積算を停止させるか否かを飽和の原因に応じて適切に制御すること。
【解決手段】 コヒーレント積算部41では、メモリ31に格納されたIF信号と、コード生成部32により生成されたレプリカC/Aコードとが、ミキサ42より合成されて相関値が算出され、相関値が積算部43に積算される。そして、積算回数モニタ部46は、積算部43の積算回数を計数するとともに、飽和時制御部45により相関値の積算の飽和が検出された場合、積算回数が基準回数以下ならば積算部43の積算を停止させ、積算回数が基準回数を超えているならば積算を停止させない。
(もっと読む)
701 - 710 / 1,802
[ Back to top ]