
国際特許分類[G01S7/298]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 無線による方位測定;無線による航行;電波の使用による距離または速度の決定;電波の反射または再輻射を用いる位置測定または存在探知;その他の波を用いる類似の装置 (17,599) | グループ13/00,15/00,17/00による方式の細部 (3,965) | グループ13/00による方式のもの (2,705) | パルス方式の細部 (874) | 受信機 (643) | 座標を変換するためのあるいは情報を評価するための手段,例.計算機を使用するもの (72) | 走査変換器 (12)
国際特許分類[G01S7/298]に分類される特許
1 - 10 / 12
画素データ生成装置、画像表示装置、レーダ装置、画素データ生成方法及び画素データ生成プログラム
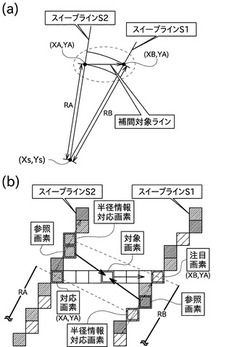
【課題】レーダ装置等の画像表示装置が備える画素データ生成装置において、周方向を考慮した補間データを画素抜け部分に漏れなく描画できる構成を提供する。
【解決手段】レーダ装置の画像表示装置が備える画素データ生成装置は、エコー強度計算部と、補間内容生成部と、を備える。エコー強度計算部は、スイープラインS1上のサンプルデータと、スイープラインS2上のサンプルデータと、をXY直交座標系の画素データにそれぞれ変換する。補間内容生成部は、XY直交座標系のX軸又はY軸に平行な補間対象ライン上にある注目画素と、同一の補間対称ライン上にある対応画素と、の間に位置する対象画素の画素データを生成する。この対象画素の画素データは、スイープラインS1上の画素データとスイープラインS2上の画素データとに基づいて生成される。
(もっと読む)
レーダ装置

【課題】
レーダ主画面上の指定目標物に対する高分解能レーダ画像を随時確認することを可能にする。
【解決手段】
送信波を放射する送信部と、送信波を放射する送信部と、複数個のアンテナおよび受信機から構成され、前述送信波が目標物から反射した到来波を受信する受信部と、それぞれの受信機に対応してA/Dサンプリングを行うAD部と、画像処理によって自動的に追尾機能を実行し、到来方向推定の実施領域を決定する特定領域決定部と、到来方向推定を行うための評価関数(例えば、MUSICスペクトラム)を計算する到来方向推定部と、全方位のレーダ画像を表示する主画面表示部と、自動的に決定された特定領域の高分解能処理結果を表示する副画面表示部を具備する。
(もっと読む)
信号処理装置、レーダ装置、信号処理方法、および信号処理プログラム
【課題】コヒーレント積分を行う場合において、干渉成分による影響を軽減した信号処理装置を提供する。
【解決手段】ソート処理部153は、振幅値に応じてデータ列を並び替える処理を行う。閾値検出部154は、ソート処理部153によって並び替えられたデータ列の中から、振幅値の小さい順に複数点のデータを選択する。そして、閾値検出部154は、選択したデータの平均値を算出し、この平均値に所定の係数αを掛けた値を閾値として算出する。ゼロ置換処理部151は、閾値検出部154から入力された閾値と、各データの振幅値とを比較する。閾値以上の振幅値を示すデータが存在した場合、そのデータ(スイープメモリ13から入力した複素信号)を0に置換し、コヒーレント積分処理部161に出力する。閾値未満の振幅値を示すデータは、スイープメモリ13から入力した複素信号をそのままコヒーレント積分処理部161に出力する。
(もっと読む)
表示装置及び表示方法
【課題】表示された画素の情報に基づいて、画素抜けが発生した領域における画素を補完する表示装置及び表示方法を提供する。
【解決手段】互いに隣接する2つのスイープライン及び表示領域によって形成される補完領域において、スイープライン上に位置しない画素である未描画画素を検出する検出手段11と、補完領域から、少なくとも1つの未描画画素を含む複数の領域に分割した部分補完領域を、極座標形式から直交座標系式に変換して仮想的に算出する算出手段12と、未描画画素を、部分補完領域毎にスイープの中心から半径方向外側へ描画することで未描画画素へ描画の補完を実施する描画手段13とを備える。
(もっと読む)
レーダビデオ表示装置
【課題】本発明の課題は、レーダビデオの特性上必要なビデオデータの減光処理、高輝度の点を優先的に描画する為の処理をGPU処理で行うことにより、CPU処理の負荷を大幅に軽減したレーダビデオ表示装置を提供することにある。
【解決手段】本発明は、CPUにより受信したアジマス分のデータをメインメモリからテクスチャメモリに送る処理をし、GPUにおいて、テクスチャメモリから座標、輝度、更新時間の描画頂点情報が入力され、更新時間と現在時間の差で輝度に対して減光計算を行い、減光計算を行った1レンジ分解能分のデータの輝度の階調情報を座標軸のZとして3次元化すると共に、描画頂点情報の3次元の座標値と輝度からレンダリング処理を行って2次元の画像データに変換する処理をする。
(もっと読む)
物標探知装置、物標探知方法、および物標探知プログラム
【課題】より正確なスキャン相関処理を行える物標探知装置を実現する。
【解決手段】物標探知装置100の相関処理部6は、スイープメモリ2に記憶された極座標系のエコーデータと、読出用メモリ70Bにて極座標系で記憶された前回スキャンのスキャン相関処理後記憶データとを、スキャン相関処理する。この際、アドレス決定部5は、アンテナ回転情報取得部3からのアンテナ回転情報と位置検出部4からの位置情報および船首方位とを用いて、スイープメモリ2からのエコーデータと、読出用メモリ70Bからのスキャン相関処理後記憶データとの座標系を一致させるように、読出アドレスを設定して、読出用メモリ70Bへ与える。書込用メモリ70Aは、アドレス決定部5により今回スキャンの基準タイミングの座標系で設定された書込アドレスに準じて、相関処理部6からのスキャン相関処理後データを記憶する。
(もっと読む)
信号処理装置、この信号処理装置を備えるレーダ装置及びその信号処理装置の画素抜け検出方法
【課題】方位を異ならせて探知信号を送信するとともに、画素がマトリクス状に配列されて構成される画像に、エコー信号に基づく情報を描画して表示器に表示する信号処理装置において、様々な位置及び大きさで発生する画素抜けを確実に検出できる構成を提供する。
【解決手段】レーダ装置が備える画素抜け検出部は、今回描画するスイープラインである今回スイープラインの画素の位置と、前回処理したスイープラインである前回スイープラインの画素の位置と、に基づいて画素抜け検出を行う。より具体的には、前記画素抜け検出部は、今回スイープライン上の画素である注目画素と、この注目画素にX軸方向又はY軸方向で対応する前回スイープライン上の画素である対応画素と、に挟まれる1以上の中間画素が存在するときに、当該中間画素を画素抜け部分と判定する。
(もっと読む)
スキャンコンバータ、レーダ装置及びスキャンコンバート方法
【課題】拡大表示を行う際にも、レーダエコー等のデータを欠落なく高速に再現する。
【解決手段】始点終点メモリ2に各方位それぞれに対応する探知距離に相当する線分の両端座標を予め記憶しておく。表示領域設定部7は、CPU3の指示により表示装置の画面表示領域を指定する情報をもとに座標計算部4に表示領域の設定を行う。レーダビデオとして各方位それぞれの測定結果(距離及び信号強度)が入力ビデオバッファ1に入力される毎に、座標計算部4は各方位に対応する線分の始点及び終点座標を始点終点メモリ2から読み出す。座標計算部4は、読み出された始点から終点に向かって表示領域設定部7により設定される表示領域を越えるまで測定結果が示す距離を計算された線分上の座標点に換算して、それぞれの距離に対応する信号強度を換算された座標点のフレームバッファ6に描画することでラスタビデオに変換する。
(もっと読む)
スキャンコンバータ、レーダ装置、及びスキャンコンバート方法
【課題】レーダエコー等のデータを欠落なく高速かつ忠実に再現する。
【解決手段】始点終点メモリ2に各方位それぞれに対応する線分の始点及び終点座標を予め記憶しておく。レーダビデオとして各方位それぞれの測定結果(距離及び信号強度)が入力バッファ1に入力される毎に、座標計算部4は各方位に対応する線分の始点及び終点座標を始点終点メモリ2から読み出し、読み出された始点及び終点座標を結ぶ線分を表す座標配列を計算する。そして、上記測定された距離を線分を表す座標配列の座標点に換算して信号強度をそれぞれの距離に対応する座標点のフレームバッファ6に描画することでラスタビデオに変換する。
(もっと読む)
レーダ装置および類似装置
【課題】物標とレーダ干渉やホワイトノイズ等の不要波とを識別して、異なる表示形態で表示するレーダ装置を実現する。
【解決手段】減算フラグ発生部6は、対象とするエコーデータの時間的継続性と平面的連続性とを判定する。時間的継続性は、同じ位置にどれだけ有意なエコーデータが存在し続けたかを示す量であり、過去所定スイープ回転回数分のエコーデータから得られる。平面的連続性は、対象とするエコーデータの周りにどれだけ有意なエコーデータが存在するかを示す量であり、対象エコーデータを中心に距離方向および方位方向に所定量ずつのエコーデータを平面的に取得することで得られる。減算フラグ発生部6は、時間的継続性と平面的連続性のいずれかがあると検出すると減算フラグ「1」を添付する。減算処理部9は、減算フラグが「1」ならばデータレベルの減衰量を低くし、「0」ならば速くする。
(もっと読む)
1 - 10 / 12
[ Back to top ]