
国際特許分類[G02B7/28]の内容
物理学 (1,541,580) | 光学 (228,178) | 光学要素,光学系,または光学装置 (130,785) | 光学要素用のマウント,調節手段,または光密結合 (19,876) | 焦点調節信号の自動発生用のシステム (8,132)
国際特許分類[G02B7/28]の下位に属する分類
基線長視差三角形を用いるもの (296)
瞳面の異なる部分を使用するもの (1,337)
像鮮鋭度技術を使用するもの (2,180)
反射波,例.超音波の,遅延時間を使用するもの (43)
国際特許分類[G02B7/28]に分類される特許
41 - 50 / 4,276
焦点調節装置及びその制御方法
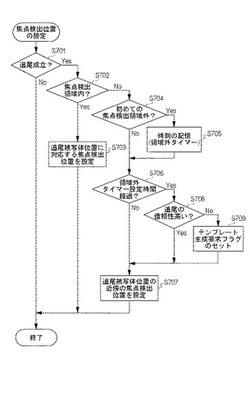
【課題】 被写体が大きく移動する場合や、手ぶれなどで被写体が焦点検出領域から外れる場合でも、追尾被写体の位置に基づいて最適な焦点検出位置を選択可能にすることで追尾性能を向上させた焦点調節装置を提供する。
【解決手段】 複数の焦点検出領域を備えた焦点調節装置は、指定した追尾被写体に対応する測光領域を抽出領域に設定し、該抽出領域の測光情報を保持する設定手段と、引き続き出力される測光情報から、前記設定手段が保持する前記抽出領域の測光情報に類似した測光情報を有する測光領域を追尾被写体位置として順次検出する被写体追尾手段とを有する。検出された追尾被写体位置が焦点検出領域内である場合、該追尾被写体位置に対応する焦点検出領域を用いて焦点検出を行い、検出された追尾被写体位置が焦点検出領域外である場合、該追尾被写体位置の近傍の焦点検出領域を用いて焦点検出を行う。
(もっと読む)
距離測定装置、撮像装置、距離測定方法

【課題】撮像素子から得られた画像に基づいて、より信頼性の高い距離情報を取得することができる距離測定装置等を提供する。
【解決手段】撮像光学系9と、撮像光学系9の瞳領域を通過する3つ以上の帯域の光の光量の重心位置を異ならせる帯域制限フィルタ12と、カラーの撮像素子22と、撮像素子22から得られた複数帯域の色画像に基づき被写体までの距離を演算する位相差AF部42と、色画像が位相差演算に適しているか否かを判定する位相差適合判定部41と、位相差適合判定部41により位相差演算に適していると判定された適合色画像の数が3つ以上である場合に、位相差AF部42に、選択した2つの適合色画像の組み合わせの相関値、または2つの適合色画像の全ての組み合わせの相関値に基づき、被写体までの距離を演算させるAF制御部38と、を備えた距離測定装置。
(もっと読む)
画像信号処理装置
【課題】一般的なデジタルカメラやビデオカメラに搭載されているAF機能は、点光源の存在するシーンにおいて正常に合焦しないことがある。
【解決手段】焦点評価値を算出する対象となる領域を設定する焦点評価値算出対象領域設定手段と、前記焦点評価値算出対象領域設定手段によって設定された焦点評価値算出対象領域内の点光源の有無を判定する点光源検出手段と、前記点光源検出手段から得た情報を用いて点光源の存在する領域を特定し、該領域を焦点評価値算出対象から除外して焦点評価値を算出する点光源対応焦点評価値算出手段とを備え、前記点光源検出手段によって一度点光源を検出した後は、所定の期間点光源検出手段を再び動作させないことを特徴とする画像信号処理装置。
(もっと読む)
電子機器およびプログラム
【課題】多様な表示制御を可能にしつつ、リアルタイム性の高い表示を行うこと。
【解決手段】電子機器は、表示部に対する表示制御機能を有するリアルタイムオペレーティングシステムである第1OS、および、表示部に対する表示制御機能を有する非リアルタイムオペレーティングシステムである第2OSを格納する格納部と、第1OSによる表示制御と第2OSによる表示制御とを切り替える制御部と、を備える。プログラムは、表示部に対する表示制御機能を有するリアルタイムオペレーティングシステムである第1OS、および、表示部に対する表示制御機能を有する非リアルタイムオペレーティングシステムである第2OSを動作させるステップと、第1OSによる表示制御と第2OSによる表示制御とを切り替える制御部と、コンピュータに実行させる。
(もっと読む)
カメラ付き携帯端末、撮影方法、及び撮影プログラム
【課題】正確且つ速やかに焦点を被写体に合わせることのできる、カメラ、撮影方法、及び撮影プログラムを提供する。
【解決手段】撮影レンズを介して被写体を撮像し、撮像データを生成するイメージセンサと、前記撮像データに基づいて、合焦の度合いを示す焦点評価値を算出する焦点評価値演算部と、前記焦点評価値に基づいて前記撮影レンズを移動させる合焦動作を繰り返し、撮影指示を受け付けたときに、直前の前記焦点評価値を予め設定された合焦閾値と比較し、比較結果に基づいて、前記撮影レンズの位置を動かさずに撮影を行うか、移動させてから撮影を行うかを決定する撮影制御部とを具備する。
(もっと読む)
固体撮像装置及びカメラモジュール
【課題】カメラモジュールの小型化と高速なフォーカス調整を可能とし、高感度かつ高解像度で、色再現性の優れた画像の撮影を可能とする固体撮像装置及びカメラモジュールを提供すること。
【解決手段】実施形態によれば、固体撮像装置は、撮像処理回路20及びフォーカス駆動制御部を有する。撮像処理回路20は、輝度情報生成部42、視差量算出部43及び画像合成部48を有する。輝度情報生成部42は、特定の色成分についての第1輝度情報55を生成する。視差量算出部43は、第1輝度情報55と、第2輝度情報であるモノクロ画像データ51とを基に、視差量を算出する。画像合成部48は、色情報54と、第2輝度情報とを含む合成画像データ57を生成する。フォーカス駆動制御部は、視差量を用いて求められた被写体距離に応じてフォーカス駆動を制御する。
(もっと読む)
焦点調節装置及び方法
【課題】 被写体検出機能を用いた焦点検出において、主被写体が検出できている状態から検出できない状態になった場合に、ピント合わせを安定的に行いつつ、画面全体がボケた見苦しい動画像が記録されることを防止すること。
【解決手段】 被写体を撮影して得られる画像信号に基づいて撮影画面内の特定の被写体を検出し(S12)、検出された場合に被写体の領域を焦点検出領域として設定し(S14)、検出されなかった場合に予め設定された所定領域を焦点検出領域として設定し(S33)、焦点検出領域の画像信号から焦点信号を生成し(S20)、焦点信号に基づいて焦点調節部材を移動して焦点調節制御を行う(S21)。被写体が検出された状態から、検出されない状態に遷移した場合に、所定領域の合焦度が予め設定された閾値以上のとき、被写体が検出されなくなってから予め設定された時間、閾値よりも小さい場合に比べて、前記焦点調節部材の駆動量及び駆動速度の少なくとも一方を小さくする(S502)。
【選択図】 図8 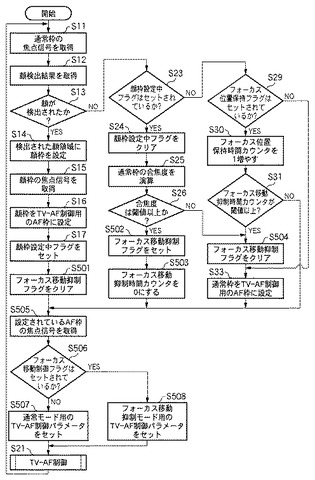 (もっと読む)
(もっと読む)
距離測定装置、および距離測定プログラム
【課題】物体までの距離を測定する距離測定装置において、物体までの距離を精度よく検出できるようにする。
【解決手段】レーダ装置は、区分された領域毎に、演算距離および演算輝度を検出し、演算輝度と、反射光の検出が困難になる程度の輝度に設定された輝度閾値とを比較し、演算輝度が輝度閾値以上となる高輝度領域を抽出する。そして、照射領域において水平方向に並ぶ一対の高輝度領域を検出し、一対の高輝度領域の間隔に基づいて一対の高輝度領域を形成する物体を表す高輝度物体までの距離を演算する(S510〜S550)。この構成では、輝度が高く、レーザ光の反射光が検出できない可能性がある高輝度領域においても、物体までの距離を検出することができる。
(もっと読む)
撮像装置及び内視鏡装置
【課題】 画角の変更に伴い合焦被写体距離が変更される撮像光学系において、位相センサからの位相情報に基づいて合焦制御を行うことで、合焦動作時に取得される画像のちらつき等を抑止する撮像装置及び内視鏡装置等を提供すること
【解決手段】 撮像装置は、画角と合焦被写体距離を同時に調整する可動レンズ240を含む撮像光学系と、撮像素子260と、複数の位相センサと、複数の位相センサからの位相情報を取得する取得部(A/D変換部320)と、可動レンズ240の位置を制御するレンズ制御部360と、位相情報に基づく位相差に基づいて、撮像光学系を通った光線による撮像素子上の像の合焦状態を実現するために必要な可動レンズ240の移動量を算出する移動量算出部350を含み、レンズ制御部360は移動量算出部350で算出された移動量に基づいて、可動レンズ240の位置を制御する。
(もっと読む)
顕微鏡装置
【課題】より迅速に、よりサンプルにピントが合った画像を取得することができる。
【解決手段】撮像素子110は第1の面に結像された像に基づいて画像信号を出力する。AF素子111は第2の面に入射された光に基づいてコントラスト信号を出力する。光学系109は、第1の領域の一部である第2の領域の像を第1の面に結像させ、第2の領域の中にあり第2の領域の中心から少なくとも第1の方向にずれた位置に設定された第3の領域からの光を第2の面に入射する。合焦点検出部112は第2の領域の合焦点を算出する。制御部114は、合焦点に基づいて第2の領域を合焦位置に合わせ、第2の領域が第1の領域上を第1の方向に走査するように光学系109とステージ102との相対位置を変化させながら、撮像素子110が複数の画像信号を出力するよう制御する。画像信号生成部115は、複数の画像信号に基づいて画像を作成する。
(もっと読む)
41 - 50 / 4,276
[ Back to top ]