
国際特許分類[G02B7/28]の内容
物理学 (1,541,580) | 光学 (228,178) | 光学要素,光学系,または光学装置 (130,785) | 光学要素用のマウント,調節手段,または光密結合 (19,876) | 焦点調節信号の自動発生用のシステム (8,132)
国際特許分類[G02B7/28]の下位に属する分類
基線長視差三角形を用いるもの (296)
瞳面の異なる部分を使用するもの (1,337)
像鮮鋭度技術を使用するもの (2,180)
反射波,例.超音波の,遅延時間を使用するもの (43)
国際特許分類[G02B7/28]に分類される特許
51 - 60 / 4,276
拡大観察装置
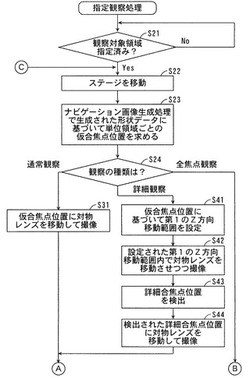
【課題】観察対象領域の対象物の観察面に撮像部の焦点を短時間で合わせることが可能な拡大観察装置を提供する。
【解決手段】対物レンズを光軸方向に移動させることにより複数のZ位置で観察対象物の単位領域を撮像し、当該単位領域に対応する複数の画像データを取得する。取得された複数の画像データに基づいて観察対象物の画像がナビゲーション画像として表示部に表示される。取得された複数の画像データに基づいて当該単位領域における観察対象物の表面の位置を示す形状データが生成される。ナビゲーション画像に基づいて観察対象物における観察対象領域が指定される。生成された形状データに基づいて、指定された観察対象領域における観察対象物の表面に対物レンズの焦点が合わせられる。
(もっと読む)
顕微鏡撮像光線路の球面収差を識別し補正する方法及び装置

【課題】顕微鏡撮像光線路の球面収差を識別し補正する方法及び装置を提供する。
【解決手段】対物レンズ(10)と、撮像光線路に配置された試料(9)を担持又は覆うカバースリップ(2)と、を備える顕微鏡(1)による試料(9)の顕微鏡撮像の状況で、顕微鏡撮像光線路(7)の球面誤差を識別する方法であって、測定ビーム(130)は、対物レンズ(10)を通って試料(9)上に、偏心して対物レンズ(10)の光軸(8)外に案内され、試料(9)とカバースリップの界面(116)で反射された測定ビーム(132)は、対物レンズ(10)を通して検出器(128)に案内され、検出器(128)は、反射測定ビーム(132)の強度プロファイルを取得し、球面誤差の存在は、前記強度プロファイルから定性的及び/又は定量的に特定される。
(もっと読む)
焦点調節装置
【課題】ピント合わせを行う場合に、被写体像の検出結果に加えて被写体像の揺れの検出結果に基づき被写体の距離変化の有無を判断し、被写体に追従するようにピント合わせを行える焦点調節装置及び方法を提供する。
【解決手段】焦点調節装置は、被写体からの光を光電変換して得られた電気信号のうち設定されたAF枠からAF評価値を生成する生成手段113、AF評価値に基づきレンズ105を駆動制御して焦点調節を行う制御手段114、所定の被写体像を検出する検出手段116、検出結果に基づき被写体の距離変化の有無を判別する判別手段114、被写体検出手段による検出結果に基づき被写体像の位置の揺れを検出する検出手段114を有する。判別手段は、被写体像の大きさの変化が発生しても被写体の揺れを検出しない場合には被写体の距離変化はないと判断し、制御手段は、被写体の光軸方向の距離変化に合わせたフォーカスレンズの追従駆動動作を制限する。
(もっと読む)
撮像装置
【課題】シャッタチャンスを逃さずに、また全体としての撮影時間も少なくしつつ、ユーザが所望の合焦状態の画像を得ることができる撮像装置を提供すること。
【解決手段】ユーザによるレリーズ指示を受けて、CPU101は、撮影時の被写体を判断し、判断した被写体に応じて撮像部102等の撮影パラメータ、並びにフォーカスレンズのスキャン範囲及びスキャン方向を設定する。その後、CPU101は、フォーカスレンズの駆動と同期するように撮像部102を連続動作させる。合焦評価部111は、撮像部102を介して得られた画像データの合焦状態を評価し、この評価結果に応じて画像データ及び合焦画像情報を記憶させる。撮影終了後に、CPU101は、合焦画像情報に従って、マルチフォーカス画像を表示部108に表示させる。ユーザは、表示部108に表示されたマルチフォーカス画像に対して種々の処理を行うことが可能である。
(もっと読む)
焦点調節装置
【課題】所定量より大きい被写体像の大きさ変化の有無を判断し、被写体の動きに追従してピント合わせを行える自動焦点調節装置及び方法を提供する。
【解決手段】自動焦点調節装置は、被写体光を光電変換して得た電気信号の焦点検出領域に対応する電気信号からAF評価値を生成する手段113と、電気信号から所定被写体像を検出する手段116と、被写体像の光軸方向の距離変化の有無を判別する手段114と、AF評価値に基づきフォーカスレンズを駆動制御して焦点を調節する制御手段114を含む。制御手段は、判別手段の判別結果に応じて被写体像の光軸方向の距離変化に合わせてフォーカスレンズを駆動制御する際に被写体像の大きさ変化量が所定量より大きい場合には距離変化に対応させた追従駆動動作を駆動制御として行い、所定量より小さい場合には距離変化に合わせた追従駆動動作を制限する。所定量は撮影パラメータと被写体状況に応じて変化させる。
(もっと読む)
表示制御装置、撮像装置および表示制御プログラム
【課題】ユーザがライブビュー画像の一部の領域を拡大すると、被写体像および補助線の相対的な位置関係は、拡大前後で異なってしまう。そのため、ユーザは、構図の水平、垂直を正しく判断することができない。
【解決手段】表示制御装置は、画像と、画像に重畳する補助線とを表示器に表示させる表示制御部と、表示された撮影画像の表示倍率を変更する変更指示を受け付ける受付部とを備え、表示制御部は、受付部が変更指示を受け付けた場合には、画像と補助線の相対的な位置関係を維持して、変更された表示倍率による画像と補助線とを表示器に表示させる。
(もっと読む)
撮像装置および撮像方法
【課題】夜景などのように点光源が支配的な被写体であっても、精度よく自動焦点処理を行うことができる撮像装置および撮像方法を得る。
【解決手段】撮像レンズを介して取得された被写体像に応じた画像信号を出力する撮像素子と、撮像レンズを移動させるレンズ移動手段と、画像信号から得た画像データに応じて焦点を決定する自動焦点検出手段と、を有し、画像データに含まれる輝度成分によって被写体像が点光源被写体であるか否かを判定する点光源検出手段と、被写体像が点光源被写体であるとき撮像素子の駆動条件を変更する撮像素子駆動設定手段と、有する撮像装置による。
(もっと読む)
焦点調節装置
【課題】被写体にピント合わせを行う際に、安定と判断された被写体の動きの有無を判断し、動きに追従するようにピント合わせを行える自動焦点調節装置及び方法を提供する。
【解決手段】自動焦点調節装置は、被写体からの光を光電変換して得られた電気信号のうち設定されたAF枠からAF評価値を生成する生成手段113と、評価値に基づきフォーカスレンズ105を駆動制御して焦点調節を行う制御手段114と、所定の被写体像を検出する検出手段116と、被写体の光軸方向の距離変化の有無を判別する判別手段114と、検出結果が被写体の安定状態での結果か否かを判定する被写体安定判定手段114を有する。制御手段は、被写体が安定していると判定されたときの判別結果に応じて、被写体の光軸方向の距離変化に対応させたフォーカスレンズの追従駆動動作の禁止と許可を切り替えて焦点調節を行う。
(もっと読む)
被写体追尾装置およびカメラ
【課題】被写体を正確に追尾できること。
【解決手段】被写体追尾装置は、入力画像内に設定した第1の探索範囲内の画像に対してテンプレートマッチング処理を行い、追尾被写体位置を特定する第1の追尾手段12と、入力画像内に設定した第2の探索範囲内の画像に対してラベリング処理を行い、追尾被写体位置を特定する第2の追尾手段14と、を備え、第1の追尾手段12が特定した追尾被写体位置と、第2の追尾手段14が特定した追尾被写体位置との距離が所定値未満である場合には、第1の追尾手段12または第2の追尾手段14が特定した追尾被写体位置を用いて次回の第1の探索範囲を設定し、第1の追尾手段12が特定した追尾被写体位置と、第2の追尾手段14が特定した追尾被写体位置との距離が所定値以上である場合には、第2の追尾手段14が特定した追尾被写体位置を用いて次回の第1の探索範囲を設定する。
(もっと読む)
撮像装置、撮像システム、及び焦点検出方法
【課題】 位相差方式の焦点検出において、製造誤差による焦点検出光束のケラレがあっても高精度に焦点検出を行うこと。
【解決手段】 撮影レンズ(TL)の異なる領域を通過する対の光束をそれぞれ光電変換して画像信号対を出力する複数の焦点検出用画素対を含む、撮像素子(107)と、前記撮影レンズの光軸に対する前記焦点検出用画素対の中心軸ずれ情報を記憶するフラッシュメモリ(133)と、前記中心軸ずれ情報と前記撮影レンズの射出瞳情報とに基づいて、前記焦点検出用画素対それぞれに入射する光量のアンバランスを補償するように、前記画像信号対の信号レベルを補正する補正部(170)と、前記補正部により補正された前記画像信号対を用いて、前記撮影レンズの焦点検出を行う焦点検出手段(171)と、を備える。
(もっと読む)
51 - 60 / 4,276
[ Back to top ]