
国際特許分類[G02B7/34]の内容
物理学 (1,541,580) | 光学 (228,178) | 光学要素,光学系,または光学装置 (130,785) | 光学要素用のマウント,調節手段,または光密結合 (19,876) | 焦点調節信号の自動発生用のシステム (8,132) | 瞳面の異なる部分を使用するもの (1,337)
国際特許分類[G02B7/34]に分類される特許
11 - 20 / 1,337
焦点調節装置及び焦点調節装置の制御方法
【課題】 顔や色といった特徴情報を用いた追尾の精度を保ちつつ、追尾した領域の位相差AF性能を向上させる。
【解決手段】 焦点調節装置は、被写体の特徴情報を検出する被写体検出手段と、電荷蓄積を行ってそれぞれ一対の像信号を生成し出力する複数の信号生成手段と、複数の信号生成手段の電荷蓄積を制御し、被写体検出手段により検出された被写体の特徴情報に対応する第1の信号生成手段から出力された一対の像信号の位相差に基づいて焦点検出を行う焦点検出手段とを有する。焦点検出手段は、被写体検出手段による検出の信頼性が第2のレベルより高い第1のレベルの場合、第2のレベルの場合と比較して、第1の信号生成手段の電荷蓄積時間を長くする。
(もっと読む)
焦点調節装置及びその制御方法

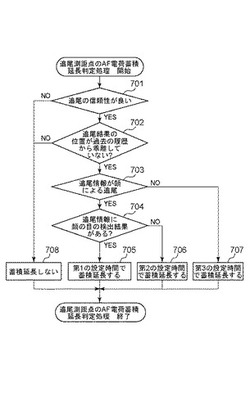
【課題】 被写体が大きく移動する場合や、手ぶれなどで被写体が焦点検出領域から外れる場合でも、追尾被写体の位置に基づいて最適な焦点検出位置を選択可能にすることで追尾性能を向上させた焦点調節装置を提供する。
【解決手段】 複数の焦点検出領域を備えた焦点調節装置は、指定した追尾被写体に対応する測光領域を抽出領域に設定し、該抽出領域の測光情報を保持する設定手段と、引き続き出力される測光情報から、前記設定手段が保持する前記抽出領域の測光情報に類似した測光情報を有する測光領域を追尾被写体位置として順次検出する被写体追尾手段とを有する。検出された追尾被写体位置が焦点検出領域内である場合、該追尾被写体位置に対応する焦点検出領域を用いて焦点検出を行い、検出された追尾被写体位置が焦点検出領域外である場合、該追尾被写体位置の近傍の焦点検出領域を用いて焦点検出を行う。
(もっと読む)
情報処理装置、情報処理方法およびプログラム
【課題】撮像素子から信号を読み出す際の間引き処理を適切に設定する。
【解決手段】情報処理装置は、検出部と決定部とを備える。検出部は、位相差検出による合焦判定を行うための信号を生成する複数の位相差検出画素と画像を生成するための信号を生成する複数の画像生成画素とを備える撮像素子により生成された画像に含まれる被写体の動きを検出する。決定部は、撮像素子から信号を読み出す際の間引き処理を検出部により検出された被写体の動きに応じて決定する。
(もっと読む)
距離測定装置、撮像装置、距離測定方法
【課題】撮像素子から得られた画像に基づいて、より信頼性の高い距離情報を取得することができる距離測定装置等を提供する。
【解決手段】撮像光学系9と、撮像光学系9の瞳領域を通過する3つ以上の帯域の光の光量の重心位置を異ならせる帯域制限フィルタ12と、カラーの撮像素子22と、撮像素子22から得られた複数帯域の色画像に基づき被写体までの距離を演算する位相差AF部42と、色画像が位相差演算に適しているか否かを判定する位相差適合判定部41と、位相差適合判定部41により位相差演算に適していると判定された適合色画像の数が3つ以上である場合に、位相差AF部42に、選択した2つの適合色画像の組み合わせの相関値、または2つの適合色画像の全ての組み合わせの相関値に基づき、被写体までの距離を演算させるAF制御部38と、を備えた距離測定装置。
(もっと読む)
撮像装置及び内視鏡装置
【課題】 画角の変更に伴い合焦被写体距離が変更される撮像光学系において、位相センサからの位相情報に基づいて合焦制御を行うことで、合焦動作時に取得される画像のちらつき等を抑止する撮像装置及び内視鏡装置等を提供すること
【解決手段】 撮像装置は、画角と合焦被写体距離を同時に調整する可動レンズ240を含む撮像光学系と、撮像素子260と、複数の位相センサと、複数の位相センサからの位相情報を取得する取得部(A/D変換部320)と、可動レンズ240の位置を制御するレンズ制御部360と、位相情報に基づく位相差に基づいて、撮像光学系を通った光線による撮像素子上の像の合焦状態を実現するために必要な可動レンズ240の移動量を算出する移動量算出部350を含み、レンズ制御部360は移動量算出部350で算出された移動量に基づいて、可動レンズ240の位置を制御する。
(もっと読む)
光学機器、レンズ鏡筒および自動焦点調節方法
【課題】2種類の焦点検出方法を使用して2つの駆動手段で2つのフォーカスレンズ群を有する場合にAFを高速かつ高精度に行うことが可能な光学機器を提供すること
【解決手段】位相差AFモードにおいて第2のステッピングモータ19の駆動量が第1の閾値よりも大きい場合には第1のステッピングモータ18によって第1レンズ群11を駆動し、第2のステッピングモータ19の駆動量が第1の閾値以下の場合には第2のステッピングモータ19によって第2レンズ群13を駆動し、コントラストAFモードにおいて、第2のステッピングモータ19の駆動量と駆動時間から算出される第2のステッピングモータ19の駆動速度が第2の閾値よりも大きい場合には第1のステッピングモータ18によって第1レンズ群11を駆動を駆動し、第2のステッピングモータ19の駆動速度が第2の閾値以下の場合には第2のステッピングモータ19によって第2レンズ群13を駆動する。
(もっと読む)
焦点検出装置および撮像装置
【課題】精度良く焦点検出を行うことが可能な焦点検出装置を提供する。
【解決手段】一次元状に配列した複数の画素からなる一対の受光センサ161d1,161d2を備え、一対の受光センサ161d1,161d2からの出力を、画素位置に対応する複数のデータが一次元状に配列した第1データ列および第2データ列として出力する受光部と、第1データ列に対してフィルタ処理を施し、画素間位置における複数のデータからなる第1画素間データ列を演算するフィルタ処理部163と、第1画素間データ列と第2データ列とを、画素間隔を単位とした変位量で相対的に変位させながら、第1画素間データ列と第2データ列との相関量を演算し、相関量の極値が得られる変位量を第1変位量として演算する第1変位量演算部163と、第1変位量に基づいて、光学系の焦点状態を検出する焦点検出部163,170と、を備えることを特徴とする焦点検出装置。
(もっと読む)
撮像装置及び画像処理方法
【課題】 焦点検出画素における画像信号を少ない記憶容量で生成すること。
【解決手段】 撮像装置は、撮像用画素群と焦点検出用画素群とを含む撮像素子10と、前記焦点検出用画素群の位置分布を示す分布情報を記憶するメモリ20と、前記位置分布を示す分布情報に基づいて前記焦点検出用画素群の各画素の位置における画像信号から前記撮像用画素群の画像信号から生成する補正回路13と、前記撮像用画素群の画像信号と、補正回路13により生成された前記焦点検出用画素群の画像信号と、に基づいて撮像画像を形成する信号処理回路15と、を備える。
(もっと読む)
撮像装置
【課題】 周囲が暗いときでも適切に故障なのか否か判定できるようにする。
【解決手段】 ハイブリットAFシステムにおいて、センサーの故障を検知する手段に一方のAFシステムの割り込み信号を利用し、ファーム起動後、前記一方の手段により、故障チェックを行い、撮影中には他方の手段から得られる情報も用いて故障チェックを行うことを特徴とする。
(もっと読む)
カメラ
【課題】動画撮影中またはライブビュー動作中にピントの合った静止画を撮影する。
【解決手段】焦点調節手段により測距、演算および駆動とを繰り返し実行させながら、画像生成手段により記録用動画を生成させる動画撮影モード、または画像生成手段により表示用画像を生成させるライブビューモードを実行する制御手段とを備え、制御手段は、動画撮影モードまたはライブビューモードの実行中であって、焦点調節手段による演算または駆動の実行中に静止画撮影操作がなされた場合には、焦点調節手段により測距、演算および駆動を実行させた後に画像生成手段により静止画を生成させる。
(もっと読む)
11 - 20 / 1,337
[ Back to top ]