
国際特許分類[G05B11/42]の内容
物理学 (1,541,580) | 制御;調整 (21,505) | 制御系または調整系一般;このような系の機能要素;このような系または要素の監視または試験装置 (12,533) | 自動制御装置 (494) | 電気式 (493) | 特別な特性,例.比例,微分,積分,を得るための装置をもつもの (345) | 比例と時間依存特性の両方,例.P.I.,P.I.D,を得るためのもの (26)
国際特許分類[G05B11/42]に分類される特許
1 - 10 / 26
多重系モータの制御装置及び移動体
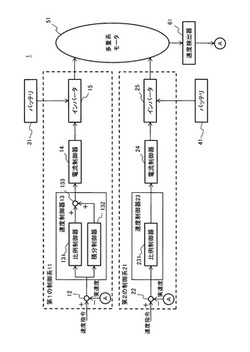
【課題】積分制御器の出力が発散しない多重系モータの制御装置及び移動体を提供する。
【解決手段】本発明の一形態に係る多重系モータの制御装置は、速度指令と実速度との偏差に基づいて、多重系モータ51の一つの系をそれぞれ制御する、第1の制御系11と第2の制御系21とを備え、第1の制御系11は、多重系モータ51の一つの系をPI制御し、第2の制御系21は、多重系モータ51の他の一つの系をP制御する。これにより、積分制御器の出力が発散しない多重系モータの制御装置及び移動体を提供することができる。
(もっと読む)
アクチュエータの制御装置

【課題】アクチュエータの動作限界付近での入力外乱抑圧性能を向上させる。
【解決手段】入力外乱抑圧性能を持つフィードバック制御器(スライディングモード制御器)と、そのフィードバック制御器で生成した制御入力と入力制限値との差にゲインを乗じた値を上記フィードバック制御器の入力側にフィードバックするアンチワインドアップ制御器とを備えたアクチュエータの制御装置において、上記入力制限値を、アクチュエータの動作限界値から決定される入力量に、入力外乱抑圧性能を持つフィードバック制御器で補償すべき入力外乱を加えた値に設定する。このような設定により、アクチュエータの動作限界値まで制御入力の演算が可能になり、その動作限界付近での入力外乱抑圧性能が向上する。
(もっと読む)
PID調整装置およびPID調整プログラム
【課題】PID調節器の調整方法等に関して、広く現場のエンジニアに普及させることが可能となり、且つ調整労力と時間とを著しく短縮できるPID調整装置30等を提供する。
【解決手段】伝達関数パラメータ取得部32は、制御対象10に入力する操作量MVの時系列データと操作量MVに応じて制御対象10から出力される制御量PVの時系列データとに基づき制御対象10を表現する複数の伝達関数のパラメータを求める。適合性取得部34は当該パラメータを有する各伝達関数が出力した推定制御量と実際の制御量との適合率を求める。最良伝達関数選択部36は当該適合率に基づき、最良の適合性を有する伝達関数を選択する。最適PIDパラメータ探索部38は、選択された伝達関数11等を対象として設定値SVに対する設定値応答及び外乱dに対する外乱応答の結果から予め決めておいた評価指標を満たすようにPID調節器20のPIDパラメータを探索する。
(もっと読む)
水車またはポンプ水車用調速制御装置
【課題】水車またはポンプ水車用調速制御装置において、発電機の負荷遮断後、ガイドベーン閉鎖特性の適正化と、軸系の回転速度および導入鉄管の水圧変動の安定性を確保する。
【解決手段】出力増減指令1による指令値と、軸回転速度19とガイドベーン9の開度の検出値との偏差を演算する制御入力演算器3の演算値を入力するPIDコントローラ4と、フィードフォワード制御要素22を設け、発電機18の負荷遮断信号を受信するフィードフォワード制御要素22によって、予め設定されたガイドベーン閉鎖特性の関数でトラッキング演算するようPIDコントローラのI(積分)演算要素6が制御され、その演算結果と、P(比例)5、D(微分)6演算要素の結果和でガイドベーン開度を制御する調速制御装置2。
(もっと読む)
モータ駆動制御装置
【課題】制御入力の飽和による制御性能劣化や制御系の不安定化を確実に防止できるモータ駆動制御装置を得ること。
【解決手段】参照位置偏差算出部4aは制御入力計算部7の出力と入力との関係に基づいて、制御入力hが参照制御入力bに一致するための参照位置偏差dを算出する。位置補正量算出部5aは参照位置偏差dの絶対値が位置偏差eの絶対値よりも小さい場合、位置補正量fを位置偏差eが前記参照位置偏差dと一致するように算出して出力し、参照位置偏差dの絶対値が位置偏差eの絶対値よりも大きい場合は、前記位置補正量fをゼロにして出力する。指令値整形部6aは位置偏差eから位置補正量fを引き算して生成した修正位置偏差gを制御入力計算部7の入力信号とする。
(もっと読む)
システムを制御するためのコントローラおよびコントローラを有するシステムを制御する方法
【課題】ハイブリッドコントローラの状態をリセットする方法及びシステムを提供する。
【解決手段】コントローラは、フィードフォワード成分azrを生成するフィードフォワードモジュールと、比例成分Kpvzを生成する比例モジュールと、積分又は遅れ成分を生成する、状態リセットを有する積分又は遅れモジュールとを含む。ここで、aは高周波利得であり、Kpvは比例利得である。フィードフォワード成分azr、比例成分Kpvz、及び積分成分Kivzcは、制御されるシステムに対する入力uとして結合される。
(もっと読む)
制御装置
【課題】オーバーシュートの発生を抑制することができる制御装置及び制御方法を提供する。
【解決手段】偏差<閾値11となるまでは(偏差≧閾値11の間は)、偏差がそのまま比例演算部2に供給されるので、比例演算部2では、一般的なP(比例)制御が行われる。そして、目標値近傍に達し、偏差<閾値11となると、スイッチ12がオンとなり、固定値(≦偏差)13が減算器14に供給される。比例演算部2では、偏差から固定値13が減算された値に基づいて、P(比例)制御が行われる。そして、偏差<閾値11になってから目標値に達して偏差が0になるまでの領域では、比例演算部2の出力が負となり、正である積分演算部3の出力と相互に打ち消しあうことになる。したがって、目標値近傍では、加算器5の出力が緩やかに変化するため、オーバーシュートの発生が抑制される。
(もっと読む)
ヒータ及びモータの制御
制御方法は、次式を使用する。すなわち、制御値(CV)=比例値(PV)+微分値(DV)+微分補正(DC)である。ここで、PVは、0からMAXまで達し、非常に狭いバンドにわたり−例えば、設定値からプラスマイナス1℃の温度制御で−作用し、CVを安定化するために使用され、設定値に追い込む。DVは、−MAXからMAXまで達し、最も直近の値を古い値に比してより多く重み付けをすることで、時定数にわたって指数関数的に値が下がる。これによって、大きなステップサイズにかかわらず、制御は真の微分を見込むことができ、そのステップサイズはその微分を完全に小さな時間窓内にマスクするかもしれないものである。DCは、−MAXからMAXまで達し、いかなる状況に対してもこの方式を働かせる。目的とする微分係数はグラフに基づいて規定される。その後、スロープが理想の規定に従っていない場合、この値は補正のために調整される。  (もっと読む)
(もっと読む)
プラント制御装置、プラント制御方法、プラント制御プログラム、および、そのプログラムを記録した記録媒体
【課題】運転状態が大きく変動する場合でも熟練を要さずに安定した良好な運転状態に制御できるプラント制御装置を提供する。
【解決手段】運転内容変更認識手段343により運転内容がナフサを処理する定常運転である場合、状態制御手段342にてセンサ400で検出した運転状態データを第一目標値にするPID制御をする。コーク除去の非定常運転の場合、付加制御手段344は、状態制御手段342にてセンサ400で検出した運転状態データを第二目標値にするPID制御か、状態制御手段342にて制御する制御量に制御量データの値を加算させてPID制御を実施させる。
(もっと読む)
システム制御装置及びシステム制御方法
【課題】出力と、出力率フィードバック信号と、参照コマンドとを使用して、適応PIDゲインを動的に調整するための、適応PIDコントローラ及び方法を提供する。
【解決手段】適応並列比例積分微分コントローラは、固定比例積分微分コントローラコマンド、及び固定フィードフォワードコントローラコマンドを含む、固定コントローラ出力と、適応並列PIDコマンド及び適応フィードフォワードコマンドを含む、適応コントローラ出力とを生成する。上記コマンドはすべて参照コマンドから得られる。固定コントローラ出力及び適応コントローラ出力は、加算されて、被制御システムのための制御コマンドを生成する。当該被制御システムは、コントローラに対するフィードバックとして、出力の測定値及び出力の変化率を提供する。
(もっと読む)
1 - 10 / 26
[ Back to top ]