
国際特許分類[G05B13/02]の内容
物理学 (1,541,580) | 制御;調整 (21,505) | 制御系または調整系一般;このような系の機能要素;このような系または要素の監視または試験装置 (12,533) | 適応制御系,すなわちあらかじめ指定された規準に対して最適である行動を行なうようにそれ自体を自動的に調整する系 (1,027) | 電気式 (992)
国際特許分類[G05B13/02]の下位に属する分類
モデルまたはシミュレータの使用を伴うもの (319)
国際特許分類[G05B13/02]に分類される特許
1 - 10 / 673
ポンプ運転計画装置
Notice: Undefined index: from_cache in /mnt/www/gzt_ipc_list.php on line 285
駆動システム及び駆動方法、並びに露光装置及び露光方法
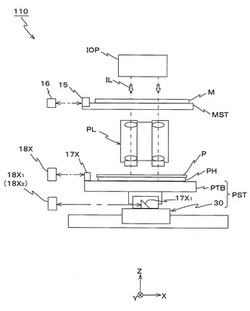
【課題】プレートステージを駆動する、高帯域でロバストな駆動システムを設計する。
【解決手段】 操作量に従って駆動されるプレートステージPSTの位置(第1制御量)X1を計測する干渉計18Xが設置されたプレートテーブルPTBが示す共振モードに対して逆相の共振モードを示すキャリッジ30に、プレートステージPSTの位置(第2制御量)X2を計測する干渉計18X1が設置される。干渉計18X及び干渉計18X1を用いることにより、プレートステージPSTの駆動する、高帯域でロバストな駆動システムを設計することが可能となる。
(もっと読む)
モデル予測制御のための差動計算機械

【課題】高等工業制御技術、つまり、モデル予測制御問題とそれに対する線型計画問題linear programming(いわゆる凸計画問題)を解く効率のよい方法と装置を提供すること。
【解決手段】モデル予測制御問題を構成するクラスのうちの一つに属する線型計画問題linear programmingに基づき、定常状態目標計算に関する線型プログラムを、制御対象となる工業モデル全体の入力量と出力量の「差動」によって駆動する線型プログラムとして構成する。このとき、モデルの不確定性記述を有する特性ゲインパラメータVを有するシステムに対して、本発明は定常状態目標を達成する目的関数Wを適用することによって、既知の不確定性記述内におけるパラメータVのすべての可能値に対し、システム制御変数が定常状態を達成可能にする臨界値を提供する。そのような臨界値に修正が迫られる場合には、随時、特殊臨界値の提供により上記臨界値の修正を実行する。
(もっと読む)
設計装置及び設計プログラム
【課題】出力信号に含まれているノイズに係わらず、簡単な計算により最適な制御器を設計する。
【解決手段】入力信号u0を少なくとも1回入力して、制御対象Pから出力された出力信号y0を少なくとも1回計測することにより、少なくとも1回分の入出力データ(入力信号u0及び出力信号y0)を計測する。さらに、出力信号y0に対してスプラインフィッティングを行い、データを平滑化して、出力信号y0から雑音vを除去した出力データysを得る。さらに雑音vを除去した出力データysを線形独立なベクトルの組とし、制御対象Pの線形性に基づいて、目標出力信号y~との線形結合係数列θを算出し、当該線形結合係数列θを用いて、入力信号u0から目標入力信号u~を算出する。算出された1組の目標入力信号u~及び目標出力信号y~と参照モデルMに入力される参照信号r~との偏差e~から制御器Cの伝達関数を決定することにより、制御器Cを設計する。
(もっと読む)
パラメータ設定装置、コンピュータプログラム及びパラメータ設定方法
【課題】無線通信網の状態に応じたユースケースの適用を学習するために強化学習を行う場合における学習効率が向上する。
【解決手段】移動体通信網3の状態変数に応じて移動体通信網3の制御パラメータを設定するパラメータ設定装置2は、状態変数stに応じた各最適化処理の行動価値Q(s,a)を定める共通の価値関数30に従い、無線通信網3内の異なる複数の範囲(6a、6b)の各々について、範囲内の状態変数に応じて制御パラメータを最適化する複数の最適化処理のうちいずれかを選択して実行する処理と、複数の範囲(6a、6b)の各々について、範囲内の状態変数stに応じた報酬rtを決定する処理と、この範囲毎に決定された報酬rt毎に、報酬rtに応じて共通の価値関数30を更新する強化学習を行う強化学習処理を実行するプロセッサ10を備える。
(もっと読む)
機器相互間の省エネ装置
【課題】異なる工業単位のエネルギーを扱う複数機器を共通評価基準にて省エネ評価でき、設備全体としての省エネを図ることのできる機器相互間の省エネ装置を提供する。
【解決手段】それぞれ異なる工業次元のエネルギーを設備に供給する複数の機器を備える。前記複数の機器それぞれに関し、運転量とその運転量に応じて設備に供給するエネルギー量との関係を定めた運転特性について定格を1として正規化し、正規化された運転特性を重畳し、機器相互間の関係を表す重畳正規化データを求める。前記重畳正規化データに基づいて、前記複数の機器のうち1の機器について省エネ制御を実施した場合に他の機器に与える相互干渉度を、最適化手法により計測・分析する。前記相互干渉度に基づいて、前記設備全体としての大局的な最適解を算出する。
(もっと読む)
プラント制御装置、プラント制御方法およびプログラム
【課題】複数の操作端毎の位置指令信号値の間に差が生じた場合でも、速度型PID演算部からの自動制御を継続しつつ、複数の操作端毎の位置指令信号値間の偏差を自動的に解消する。
【解決手段】速度型PID演算手段と複数の積分演算手段と複数の上書き手段と自動バランス手段とを持つ。前記速度型PID演算手段は、偏差信号からPID演算を行い、偏差に応じた速度型の操作量指令信号を生成する。前記積分演算手段は、前記操作量指令信号に基づいて各操作端用の規定された操作端位置指令信号を生成する。前記複数の上書き手段は、各操作端用の追加の位置指令信号を生成し、対応する積分演算手段に上書き処理を行って操作端位置指令信号を新たに規定する。前記自動バランス手段は、前記規定された操作端位置指令信号間の偏差を算出し、その算出結果に基づいて前記操作量指令信号を補正し、補正された操作量指令信号を前記積分演算手段に与える。
(もっと読む)
モータ制御装置、及びモータ制御方法
【課題】コアを有するモータを制御する際の位置決め精度を向上させるモータ制御装置、及びモータ制御方法を提供する。
【解決手段】コイルが巻回されたコアを有するモータを制御するモータ制御装置は、前記モータの可動子の位置から電気角を算出する電気角算出部と、前記電気角算出部が算出した電気角に応じた制御ゲインを用いて、前記モータの駆動を制御する制御部とを具備する。
(もっと読む)
カルマン・フィルタの処理方法、プログラム及びシステム
【課題】 Unscentedカルマン・フィルタにおいて、プラント特性を考慮した非一様更新タイミングに基づき、推定精度を改善する技法を提供すること。
【解決手段】 カルマン・フィルタへの入力を、分子と分母の多項式の関係が鏡像多項式の関係によって記述される、オールパスフィルタを通すことで非一様更新を実現し、ポリフェーズフィルタによるリサンプリングとは異なった演算量を抑える構成とする。次に、カルマン・フィルタによって得られた推定状態量はそのままでは位相が非一様間隔のものであるため、上記非一様化の逆変換となるフィルタリングを行う。
(もっと読む)
制御方法および制御装置
【課題】従来よりも実用性と一般性に優れたB2B制御システムを提供する。
【解決手段】制御装置は、バッチ反応プロセスを制御するPIDコントローラを実現するカスケード制御実行部6と、反応プロセスモデルを記憶するモデル記憶部1と、モデル調整部7と、反応プロセスモデルを線形近似した伝達関数モデルを用いてPIDコントローラのPIDパラメータを調整する制御パラメータ調整部5とを備える。モデル調整部7は、冷媒入口温度Tciの実績データを平滑化して反応プロセスモデルの入力として与え、反応プロセスモデルの出力である反応温度Travの時系列データと反応温度Trの実績データとの2乗誤差を算出し、2乗誤差が最小になる、反応プロセスモデルの適応パラメータを非線形最適化により求め、適応パラメータを用いて反応プロセスモデルのモデルパラメータを調整する。
(もっと読む)
1 - 10 / 673
[ Back to top ]