
国際特許分類[G05B19/409]の内容
物理学 (1,541,580) | 制御;調整 (21,505) | 制御系または調整系一般;このような系の機能要素;このような系または要素の監視または試験装置 (12,533) | プログラム制御系 (7,632) | 電気式 (7,631) | 数値制御 (2,851) | マニュアルデータインプット (143)
国際特許分類[G05B19/409]に分類される特許
101 - 110 / 143
ロボット制御装置

【課題】1台の撮像装置を複数のロボットの間で使いまわす場合の作業者の負担を軽減させる。
【解決手段】ロボット制御装置14は、固定的に設置され且つロボットアーム12に接続された制御装置本体20と、制御装置本体20に接続された持ち運び可能な教示操作盤22とを備え、教示操作盤22によってロボットアーム12を操作できるようになっている。教示操作盤22には、撮像装置としてCCDカメラ18を接続するためのカメラ接続用端子30が設けられており、CCDカメラ18によって撮像された画像がカメラ接続用端子30を通して教示操作盤22に直接入力できるようになっている。
(もっと読む)
コントローラ

【課題】コントローラとして、取出ロボットの手動操作に際して操作ミスを起こさせないよう表示画像を工夫して使い勝手をよくする。
【解決手段】コントローラ1は、表示画面10にロボット擬似画像7と共に十字キーを模した矢印画像8を表示する。画像処理部により、軸選択ボタン6で選択されたアーム軸に対応するロボット擬似画像7のアーム軸画像72〜74部分、及び選択されたアーム軸72〜74の移動可能な方向に対応する矢印画像8のボタン画像81〜84部分をアクティブ表示させる。手動操作制御部により、アクティブ表示されたボタン画像81〜84に対応する軸移動ボタン5をオン操作すると、アクティブ表示されたアーム軸画像72〜74部分に対してアクティブ表示のボタン画像81〜84で示す方向と一致して実機の取出ロボットのアーム軸を移動させるよう取出ロボットに指令する。
(もっと読む)
モーションコントロールシステム
【課題】電子部品実装動作などの複数の移動動作をシーケンシャルに行うような作業のタイミング調整を容易に行え、作業性の向上、およびタクトタイム短縮を可能とすることで、コストダウンと性能向上が図れるモーションコントロールシステムを提供する。
【解決手段】次命令への移行タイミングが調整可能なモーション命令を含むモーションプログラム111と、次に実行するモーション命令を読み出して次命令への移行タイミングが調整可能なモーション命令かどうかの判別を行い、次に実行する命令が調整可能なモーション命令の場合のみモーション命令に設定されている移行時間に基づき次命令への移行タイミングの調整を行うプログラム実行処理部12と、を備えた。
(もっと読む)
工作機械、具体的には、レーザ工作機械の分散化制御のための方法
本発明は、工作機械(24)、詳細には、レーザ工作機械の分散化制御のための方法であって、この工作機械が、保護用ハウジング(22)によって囲まれ、機械加工領域(31)にアクセスするための少なくとも1つの監視される領域(27、28)を有する機械加工領域(31)を備え、工作機械(24)を始動するために少なくとも1つの制御盤(21)によって操作される制御部を備え、1つ又は複数の多機能キー(16)を用いて制御され、少なくとも1つの多機能キー(16)が、少なくとも1つのアクセス領域(27、28)と関連付けられ、それぞれの多機能キー(16)が押されると、工作機械(24)に対する運転シーケンスの連続作業ステップの繰返しシーケンスで次にある運転シーケンスの作業ステップが作動する方法に関する。 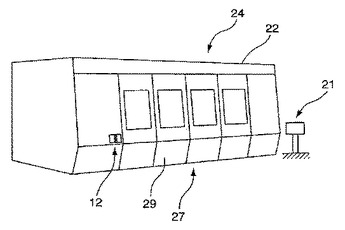 (もっと読む)
(もっと読む)
パイプベンダー、およびパイプベンダーの曲げ加工制御方法
【課題】生産効率が良く、高精度に曲げ加工を行うことができるパイプベンダの曲げ加工制御方法を提供する。
【解決手段】パイプ曲げ加工製品の設計データDaと、該設計データを加工することにより作成された制御用の加工データDbに基づいてパイプPの複数の曲げ予定部に曲げ加工を順次自動的に行うパイプベンダーの曲げ加工制御方法において、ベンダーBを任意に動作させることによりベンダーの各構成部材の各動作を目視により確認して設計データに基づいて加工データDbを制御手段8にティーチングしながら作成する加工データ作成手段209と、該加工データに各構成部材の動作の追加や変更をする等、編集する加工データ編集手段226と、を通じて自動的に制御、駆動されてパイプに曲げ加工を施す。
(もっと読む)
設定状態表示機能付き工作機械
【課題】 制御や操作のための設定項目につき、設定状態の変更があった場合に、その変更状態の認知を作業者に促すことのできる設定状態表示機能付き工作機械を提供する。
【解決手段】 工作機械本体1と、この工作機械本体1を管理する管理手段2とを備える。管理手段2は、可変設定可能な設定手段11に設定された各種の設定項目の設定状態に従って工作機械本体1の制御および操作を行う制御・操作手段3、および作業者により操作されて前記設定手段11の設定状態を変更する変更操作手段14を有するものである。この管理手段2に、変更操作手段14による変更があれば、設定手段11の変更された設定状態を画面表示手段7の画面7aに表示させる表示出力手段6を設ける。表示出力手段6は、所定の基準設定状態を定めた基準設定状態記憶部16と、設定手段11の設定状態を基準設定状態記憶部16と比較して基準設定状態から逸脱する設定項目につき、変更された設定状態を表示させる比較部17とを有する。
(もっと読む)
手持操作器
【課題】オペレータが手持操作器による手動運転操作中に、緊急に非常停止としなければならなくなった場合でも簡単かつ確実に非常停止を行なえる手持操作器を提供する。
【解決手段】手持操作器に対する衝撃を検知するショックセンサ14を有し、ショックセンサ14による衝撃検知に基づいて可動部37の非常停止を行なう非常停止装置13を備える。
(もっと読む)
部品搭載プログラム作成システム
【課題】作業能率のよい部品搭載プログラム作成システムを提供する。
【解決手段】部品搭載プログラムを作成又は編集するときに、ライン管理装置のディスプレイで行うときも部品搭載装置の操作入力用表示装置で行うときも同一の画面が表示され同一の入力操作で処理が進行する。例えば部品マスターの編集作業では、先ず実装機・実装支援ソフトメイン画面が表示され(S201)、その8種類の処理作業メニューの中の「部品マスタ作成」のメニューを選択すると部品マスターコード一覧画面が表示される(S202)。ここで画面左側に形状や型番によりツリー構造で表示される部品コードの中から所望の部品コードを選択し、画面の右側に表示させて選択が正しいことを確認し、その部品コードをクリックすると、部品マスター編集画面が表示される(S203)。これで所望の部品に関するデータ入力又は修正を行うことができるようになる。
(もっと読む)
ロボット言語処理装置
【課題】ロボット言語の表示・編集を行う際に教示装置やプログラミングペンダントに表示されるのは、従来、ロボット言語の中間コードをキャラクタ表現に変換したものだけであり、ロボットの動作を直感的に把握することができず、言語の習得に時間を要し、教示後にロボットを実際に動かして作成したプログラムの正当性を確認する必要があった。
【解決手段】グラフィカル表示が可能でありポインティングデバイスによってその表示画面中の位置を指定できる表示装置と、ロボットプログラムを格納するメモリと、ロボットプログラムを参照して、作業区間及びエアーカット区間を連続した線として表示装置に表示し、ポインティングデバイスにより表示画面に表示中のいずれかの線が指定されたときには、その線における作業内容の種類を表示画面に表示するグラフィカル言語処理部とを設け、グラフィカル・ユーザ・インタフェースに基づく教示を可能にする。
(もっと読む)
柔軟なディスプレイを備えた操作盤
【課題】従来相当の操作キー及びディスプレイ機能を維持しつつ、さらなる小型化を図ることができる操作盤を提供する。
【解決手段】操作盤10は、フレキシブルディスプレイ12、複数の操作キー14及びフレキシブルディスプレイ12をロール状に巻いた状態で格納可能な格納部16を有する。フレキシブルディスプレイ12は、第3操作キー14cを使用しない第2の操作モードにおいて、画像表示領域をより広くするために、第3操作キー14cを覆う第2の位置まで格納部16から引出されることができる。
(もっと読む)
101 - 110 / 143
[ Back to top ]