
国際特許分類[G06T1/00]の内容
物理学 (1,541,580) | 計算;計数 (381,677) | イメージデータ処理または発生一般 (58,387) | 汎用イメージデータ処理 (27,485)
国際特許分類[G06T1/00]の下位に属する分類
プロセッサアーキテクチャ;プロセッサ構成,例.パイプライン (990)
メモリ管理 (517)
国際特許分類[G06T1/00]に分類される特許
281 - 290 / 25,978
シミ分類方法、シミ分類装置およびシミ分類プログラム
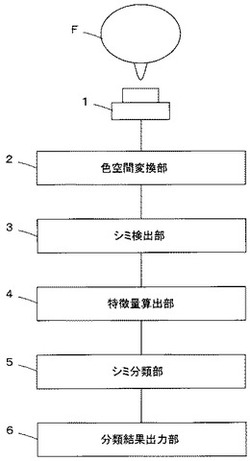
【課題】シミを高精度に分類することができるシミ分類方法を提供する。
【解決手段】被験者の皮膚を撮影して得られた画像の色空間を変換した色空間変換画像を生成し、色空間変換画像に含まれるシミを検出し、検出されたシミについて、形態特徴量および色特徴量を算出し、算出された形態特徴量および色特徴量に基づいて、機械学習法によりシミを分類する。
(もっと読む)
X線診断装置

【課題】手技効率の向上。
【解決手段】画像生成部81は、開口が第1の開口である期間において第1のX線画像を繰り返し生成し、開口が第1の開口よりも狭い第2の開口である期間において第2のX線画像を繰り返し生成する。画像合成部85は、第2のX線画像が発生される毎に、最新の第2のX線画像と特定の第1のX線画像との合成画像を繰り返し生成する。表示部9は、合成画像を即時的に動画として表示する。判定部13は、合成画像内の第1のX線画像を更新するか否かを、第1のX線画像と第2のX線画像との解剖学的な位置ずれに関する指標に基づいて判定する。駆動制御部6は、絞り駆動部4を制御して第1のX線画像を更新すると判定された場合、開口を前記第1の開口に拡大し、第1のX線画像を更新しないと判定された場合、絞り駆動部4を制御して開口を前記第2の開口に維持する。
(もっと読む)
独立成分選択を介したソース・ビデオ・データのフィルタリング
【課題】選択された信号成分が強調されるようにビデオ信号を再構築するためのシステムと方法を提供する。
【解決手段】選択のためにソース・ビデオ・データをその独立信号成分に減少させるための方法と、選択された成分が、ビデオ再生の間に、強調されるように、再構築される方法と、技術者が、例えば、患者の生体信号の優勢領域を視覚的に検査するために、再構築されたビデオを使用することが出来るように、元々のビデオをフィルタリングする方法を含む。
(もっと読む)
画像処理装置
【課題】表示操作や画像処理を撮影時の撮影情報および表示パラメータに基いて複数の画像を同期させて表示でき、画像の比較を容易にし、経時変化や治療効果の確認も容易であって、また、診察や診断の援助となる医療情報の提供が可能な画像処理装置を提供することである。
【解決手段】複数のレンダリング画像の画像処理が可能な画像処理装置において、所定操作にて複数のレンダリング画像の三次元的な観察角度を互いに同期させて表示するための表示同期手段と、この表示同期手段によるレンダリング画像の同期した表示は前記所定操作が解除されるまで持続させるための同期状態持続手段とを備えた。
(もっと読む)
運転支援装置
【課題】車輪の縁石への接触もしくは側溝への脱輪の発生するおそれがある場合の警告にステアリングの操舵力制御を用いることで、車輪の縁石への接触や側溝への脱輪を効果的に抑制する。
【解決手段】撮像手段13、14と、障害物検出手段15と、距離算出手段16とを備えた運転支援装置12において、車輪速検出手段19と、操舵角検出手段20と、操舵制御手段21と、検出された車輪速と検出された操舵角とから車輪の進路を予測する進路予測手段22と、縁石または側溝が検出された場合、予測された車輪の進路と算出された縁石または側溝と車輪との距離とに基づいて車輪が縁石または側溝に予め設定された時間内に到達するかどうかを判定する判定手段23と、車輪が縁石または側溝に予め設定された時間内に到達すると判定された時には操舵反力を大きくする制御装置18とを備えることを特徴とする。
(もっと読む)
3次元座標取得装置、カメラ姿勢推定装置、プログラム
【課題】カメラ姿勢の推定精度を向上させるとともに、処理負荷を軽減させる。
【解決手段】3次元座標取得装置100は、カメラによって撮像された立体対象物の撮像画像から当該カメラのカメラ姿勢を推定する際に用いられる前記立体対象物の3次元座標を取得する3次元座標取得装置であって、前記撮像画像から、画像平面内の特徴点を検出する特徴点検出部111と、前記カメラの焦点及び前記画像平面内の特徴点を通過する直線の方程式と、前記立体対象物の方程式とから、前記直線と前記立体対象物との交点を算出し、前記特徴点の3次元座標として取得する3次元座標取得部113とを備える。
(もっと読む)
表面検査方法
【課題】車両用部品の表面検査において、検査時間の短縮と検査精度の向上を図る。
【解決手段】車両用部品20の表面に設定される第1領域を1つの画素で検出する第1画像取得手段によって取得する第1画像取得工程と、取得した第1画像の第1領域の欠陥強度が所定の閾値以上の場合に第1領域を各欠陥検出領域351と設定する欠陥領域設定工程と、第2領域41−49を1の画素で検出する第2画像検出手段によって欠陥検出領域351と欠陥検出領域351の周辺を含む欠陥判定領域40の複数の第2領域41−49の画像を取得する第2画像取得工程と、各第2領域の欠陥強度が所定の閾値以上と判定された各第2領域41−49の欠陥強度の平均値を計算し、平均値が欠陥強度の所定の閾値以上である場合、その車両用部品は欠陥品であると判断する欠陥品判断工程と、を有する。
(もっと読む)
光ファイバ走査装置
【課題】走査装置および方法を提供すること。
【解決手段】この装置は、光伝送器と、光伝送器の出口先端部から離れて配置された、光伝送器を支持するための取付台と、光伝送器を、第1の方向に共振的に振動するように、また第1の方向と直交する第2の方向に非共振的に振動するように駆動するための駆動部と、光伝送器の出口先端部が走査パターンを実施するように、光伝送器の第1の方向と第2の方向の振動を同期させるためのシンクロナイザとを備える。駆動部が、光伝送器に対して、取付台と出口先端部との間に駆動力を加える。
(もっと読む)
距離推定装置
【課題】自車から障害物までの距離推定の精度向上を図る。
【解決手段】ビデオカメラ11で捕えた画像より建物等の障害物の法線ベクトルを垂直成分抽出部13で抽出し、抽出された法線ベクトルに基づき、傾斜路判定部15で傾斜路かの判定と傾斜路の場合の傾斜角を算出する。予めカメラ11で捕えた画像から基準法線ベクトルを抽出するとともに、画像の画素毎と自車との距離データをメモリ10に保存しておく。自車と障害物まで平坦路と傾斜路があった場合に、平坦路と傾斜路の境界と障害物までの距離を傾斜角に基づき補正するようにして自車から障害物までの距離推定の精度を向上した。
(もっと読む)
画像処理装置およびプログラム
【課題】撮像画像中のプライバシー領域の保護および有効活用を同時に実現するための画像処理装置およびプログラムを提供する。
【解決手段】撮像画像からプライバシー領域を特定する領域特定部と、前記撮像画像の前記プライバシー領域内に、前記プライバシー領域内の画像と異なる情報を有する画像を挿入する画像処理部と、を備える画像処理装置。
(もっと読む)
281 - 290 / 25,978
[ Back to top ]