
国際特許分類[G06T7/00]の内容
物理学 (1,541,580) | 計算;計数 (381,677) | イメージデータ処理または発生一般 (58,387) | イメージ分析,例.ビットマップから非ビットマップへ (10,245)
国際特許分類[G06T7/00]の下位に属する分類
動きの分析 (2,724)
テクスチャの分析 (315)
イメージからの幾何学的属性の分析,例.面積,重心,周囲長の分析 (1,881)
国際特許分類[G06T7/00]に分類される特許
41 - 50 / 5,325
特徴マッチング方法及び商品認識システム
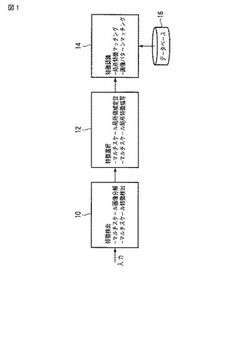
【課題】簡素なシステムで高速化が可能な特徴マッチング方法を提供すること。
【解決手段】2次元又は3次元画像データ内の対象を認識する特徴マッチング方法においては、画像内で所定の属性が極値となる特徴を検出し(10)、上記検出した特徴からエッジ及び線の輪郭に沿って存在する特徴を除外する(12)。そして、上記残りの特徴を平面に割り当て、上記割り当てた特徴から局所情報を用いて一部の特徴を選択し、上記選択した特徴を対象に特徴マッチングを行う(14)。上記特徴の検出、上記特徴の除外、上記残りの特徴の割当て、上記一部の特徴の選択、及び上記特徴マッチングの実施のうち少なくとも一つを、上記一つの2次元又は3次元画像データから作成したスケールが異なる複数の画像データに対して行う。
(もっと読む)
車外環境認識装置および車外環境認識方法

【課題】人の下部領域(下半身)を通じて人を直接特定することで、人の特定効率および特定精度の向上を図る。
【解決手段】車外環境認識装置130は、検出領域内の画像を取得し、取得した画像において道路表面に相当する平面から予め定められた高さまでの領域にある複数のブロックを、ブロック同士の第1の相対関係に基づいてグループ化し、ブロック群を生成し、ブロック群を画像の水平方向に対して2分割し、2分割したブロック群同士の第2の相対関係に基づいて、ブロック群が人の候補である第1人候補であるか否か判定する。
(もっと読む)
相関演算装置
【課題】一律な照明変動や空間的に低周波な照明ムラに対するロバスト性が高く、かつSSDAの手法の適用により演算の高速化が可能な、新たな差分総和演算を行うことができる相関演算装置を提供する。
【解決手段】相関演算装置は、位置変数に依存した関数である第1関数データおよび第2関数データに対してローパスフィルタ処理を施し、第3関数データおよび第4関数データを生成するローパスフィルタ手段と、位置変数の1つの変数値における第1関数データと第4関数とを乗じた第1積データと、該変数値における第2関数データと第3関数データとを乗じた第2積データとの差分に基づき、該変数値における第1積データと第2積データとの相関値を算出し、変数値が変化する毎の相関値を積算して得られる積算値に基づき、第1関数データと第2関数データとの相関度を算出する相関演算手段とを備える。
(もっと読む)
画像処理装置、画像処理方法及びプログラム
【課題】一部の同一被写体の位置が異なる場合でも、画像の類似判定の精度向上を図ることができる。
【解決手段】ペア画像取得部41は、判定を行う複数の画像であるペア画像を取得する。対応点探索部82は、ペア画像取得部41により取得された複数の画像のデータについて、類似する複数の画素領域を夫々特定する。ベクトル算出部83は、対応点探索部82により特定された画像領域同士の距離を夫々算出する。閾値設定部84は、ベクトル算出部83により夫々算出された距離に基づいて、閾値を設定する。類似画像判定部44は、ベクトル算出部83により夫々算出された距離のうち、閾値設定部84設定された閾値以下の距離に対応する画素領域同士に基づいて、ペア画像取得部41により取得された複数の画像のデータが類似するか否かを判定する。
(もっと読む)
3次元データ映像の階段認識方法
【課題】3次元データ映像から階段の蹴上げ面及び踏み面を検出して、階段を認識する3次元データ映像の階段認識方法を提供する。
【解決手段】3次元データ映像の階段認識方法は、映像獲得部が、階段が位置する空間の3次元データ映像を獲得する段階と、映像処理部が、前記3次元データ映像から前記階段の連続する両踏み面の間の高さを計算し、前記計算された高さによって、前記連続する両踏み面の間に位置する各ポイントを判断し、前記連続する両踏み面の間に位置する各ポイントを通じて、前記連続する両踏み面の間に位置する蹴上げ面を検出する段階と、前記3次元データ映像から前記階段の連続する両蹴上げ面の間の幅を計算し、前記計算された幅によって、前記連続する両蹴上げ面の間に位置する各ポイントを判断し、前記連続する両蹴上げ面の間に位置する各ポイントを通じて、前記連続する両蹴上げ面の間に位置する踏み面を検出する段階とを含む。
(もっと読む)
物体認識システム及び物体認識装置
【課題】ラインセンサ等の撮像装置を用いて取得した物体の撮像データを用いてその物体を認識する物体認識システムにおいて、物体の通過速度によって撮像データに含まれる物体の画像が歪むため対象物のテンプレートデータとのマッチングの精度が低下し物体の認識精度が低下するという課題があった。
【解決手段】物体認識部34は、速度検出部32で検出された物体の速度に応じて、撮像装置1、2で取得された撮像データに含まれる物体の画像をサイズ変更し、その変更後の撮像データとテンプレートデータとをマッチングして物体を認識するので、精度高く物体認識ができる。
(もっと読む)
映像付加情報関係性学習装置、方法、及びプログラム
【課題】映像に含まれる画像情報と音響情報との双方を利用し、かつその相互の共起関係を考慮して、それら情報と言語情報との関係性の学習をより高精度に行うことができるようにする。
【解決手段】蓄積画像特徴抽出部5によって、完全蓄積映像及び不完全蓄積映像の各々から、完全蓄積画像特徴及び不完全蓄積画像特徴を抽出する。蓄積音響特徴抽出部6によって、完全蓄積映像及び不完全蓄積映像の各々から、完全蓄積音響特徴及び不完全蓄積音響特徴を抽出する。蓄積付加情報特徴抽出部4によって、蓄積付加情報の各々から蓄積付加情報特徴を抽出する。蓄積潜在変数抽出部8によって、映像と付加情報の関係性を記述するための変数の集合である蓄積潜在変数集合を抽出する。映像・付加情報間関係性学習部9によって、映像と付加情報との関係性を記述するモデルである映像・付加情報関係モデルを学習する。
(もっと読む)
データ取得装置、方法及びプログラム
【課題】目的とするオブジェクトの認識に適したデータを画像集合から得ること。
【解決手段】目的のオブジェクトに係るものとして与えられた画像集合から最初に選択した画像を基準としその局所特徴量ごとにクラスタを生成し、以降に選択された画像の局所特徴量を、近似した特徴値のクラスタに分類してクラスタを更新してゆき、要素数の多いクラスタを基に抽出元の画像や特徴値をオブジェクト認識用のデータとして得る。これにより、多くの画像に共通の一般的特徴が重視され少数派の特徴は無視されるので、目的とするオブジェクトの認識に適したデータを画像集合から得ることが可能となる。特に、適切な画像を最初に選択すれば、クラスタへの分類を正しく方向づけ、オブジェクト認識の精度が改善できる。
(もっと読む)
情報処理装置、および情報処理方法、並びにプログラム
【課題】不確実で非同期な入力情報に基づく情報解析により、ユーザ位置や識別情報、発話者情報などを生成する構成を実現する。
【解決手段】画像情報や音声情報に基づいてユーザの推定位置および推定識別データを含むイベント情報を入力し、入力イベント情報に基づいて、各ユーザの位置およびユーザ識別情報を含むターゲット情報と、イベント発生源の確率値を示すシグナル情報を生成する情報統合処理部を有し、情報統合処理部は、発話源確率算出部を有し、発話源確率算出部は、各ターゲットの発話源確率を示す指標値としての発話源スコアを、イベント検出部から入力する複数の異なる情報に対して発話状況に応じた重みを乗算して算出する処理を行う。
(もっと読む)
マーカの検出および追跡装置
【課題】カメラからマーカまでの距離が近傍から遠方までの広範囲に変化した場合においても、画像処理によりマーカを検出し、そのマーカを追跡する装置を提供する。
【解決手段】マーカとしては、赤外光を反射する反射シート1を下地として、マーカ模様2a,2bを印刷した透明シート2を下地に貼り付けて構成するか、又は、マーカ模様の切り抜きを反射シート1に直接貼り付けて構成し、撮影部としては、マーカを撮影するカメラの前に赤外線透過フィルタを設置すると共にカメラの近傍に赤外線照明手段を設置してなり、演算処理部としては、近距離のときにはカメラにより撮影された入力画像の画像特徴量によりマーカを検出する画像特徴量方法と、遠距離においてはカメラにより撮影された入力画像の赤外光を基にマーカを追跡する赤外光方法とを切り替えて適用する演算処理を行う。
(もっと読む)
41 - 50 / 5,325
[ Back to top ]