
国際特許分類[G08G1/16]の内容
物理学 (1,541,580) | 信号 (47,547) | 交通制御システム (25,881) | 道路上の車両に対する交通制御システム (25,491) | 衝突防止システム (7,349)
国際特許分類[G08G1/16]に分類される特許
2,171 - 2,180 / 7,349
警報装置
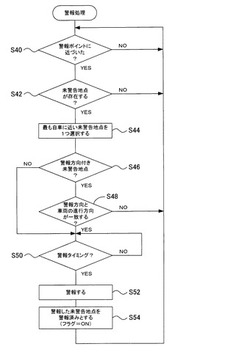
【課題】 運転者が望むタイミングに警報を行うことが可能な警報装置を提供する。
【解決手段】 ナビゲーション装置では、GPS装置を含む位置検出器が車両の現在位置を特定し、警報ポイントの警報位置情報を制御装置が備えるRAMが記憶し、車両の速度を速度センサ22が検出している。そして、現在位置、警報ポイントの警報位置、及び、車両の速度から、車両が警報位置に到達するまでの到達時間を算出し、この到達時間が、警報を行うタイミングとして設定された時間より小さくなったら車両が警報ポイントに近づいていることを警報している(S50)。そして、運転者の操作により、警報を行うタイミングを自由に設定できるようにしている。そのため、このナビゲーション装置を用いると、車両の速度に関係なく、運転者の好みに応じたタイミングで、車両が警報ポイントに近づいたことを警報することができる。
(もっと読む)
運転支援システム、運転支援方法、及び運転支援プログラム

【課題】自車両の周辺状況に応じて自車両への運転支援を行う運転支援システム、運転支援方法、及び運転支援プログラムにおいて、運転支援の精度を向上する運転支援システム、運転支援方法、及び運転支援プログラムを提供する。
【解決手段】現在の自車両と前方他車両との相対関係である車間時間Tsを取得して、当該車間時間Tsに自車両の走行情報である減速度Ggを対応付けて記憶する記憶部から、取得された車間時間Tsに対応する減速度Ggを抽出し、現在の自車両Cの減速度と抽出された減速度Ggとを比較して、現在の自車両の減速度と抽出された減速度Ggとが異なる場合に走行に関する案内を行う。
(もっと読む)
自動ブレーキ装置
【課題】カーブ進入前に、自動ブレーキを実行する車両を運転する運転者の意図を的確に反映する。
【解決手段】カーブ54cへの進入路である直進路54sにおいて、カーブへの進入口である地点Cに到達するまでの間に自動ブレーキが作動して車速が安全速度まで落ちた後の車両10の位置が、カーブの進入口より閾値距離(所定距離)以上離れた位置であった場合に、加速方向の前後Gの検出により運転者の加速意図を検出したとき、自動ブレーキ制御部の設定制動力を減圧させ、制動制御装置及びブレーキアクチュエータを通じて車輪に対する制動力を減圧するようにしたので、運転者の加速意図を的確に反映することができる。
(もっと読む)
車両周辺監視装置
【課題】対象物の時系列画像に基づいて対象物と車両との距離を算出する場合に、距離算出のタイミングの遅れが生じることを抑制した車両周辺監視装置を提供する。
【解決手段】所定のサンプリング期間内の異なる時点で赤外線カメラ2R,2Lにより撮像された複数の画像間における、同一対象物の画像部分の視差勾配を用いて、車両10と対象物間の距離を算出する第1の距離算出手段25と、車両10の車速を検出する車速センサ4と、車両10の車速が高いほど、サンプリング期間を短い時間に設定するサンプリング期間設定手段23とを備える。
(もっと読む)
車載表示装置
【課題】警報発生時に即座に警報の表示を行うことができる車載表示装置を提供する。
【解決手段】警報手段24により発せられる警報に応じて表示画像を表示する表示装置13と、該表示装置13に光を照射して前記表示画像を投影させる投光装置14とを有し、前記警報の発生に伴って前記表示装置14および前記投光装置13を駆動制御する制御手段26を備えた車載表示装置において、警報の発生を予測する予測手段28を備え、制御手段26は、予測手段28により警報の発生が予測された場合に、表示装置13および投光装置14のうち起動に要する時間が相対的に長い一方の装置の駆動制御を開始し、警報が発生した場合に、表示装置13および投光装置14のうち起動に要する時間が相対的に短い他方の装置の駆動制御を開始する。
(もっと読む)
運転支援装置
【課題】自車両の無駄な加減速を防止することができる運転支援装置を提供する。
【解決手段】 運転支援装置は、自車両が加速した場合でも信号機を青信号で通過できないかどうかを判定し、自車両が加速した場合でも信号機を青信号で通過できないと判定されたときは、加速誘導支援を実施しない。一方、自車両が加速した場合に信号機を青信号で通過できると判定されたときは、信号機交差点周辺の道路環境から判断して自車両を減速させる必要があるために自車両を加速誘導できない状況であるかどうかを判定する。信号機交差点周辺の道路環境から判断して自車両を加速誘導できない状況であると判定されたときは、加速誘導支援を実施しない。一方、信号機交差点周辺の道路環境から判断して自車両を加速誘導できる状況であると判定されたときは、加速誘導支援を実施する。
(もっと読む)
車両用情報提示装置
【課題】運転者が運転に集中したままでも、周囲の危険を適切に把握できているか否かを直感的に認識可能とする。
【解決手段】認識システムからの出力に基づいて、ドライバが把握しているリスクレベルとシステムが認識しているリスクレベルとのリスク差ΔRDを調べ、このリスク差ΔRDに応じて、表示装置に表示する図形の縦・横の大きさを、図形の重心を中心にして上下左右に広がるように変化させる。同時に、図形表示のRGBの各成分も変化させる。これにおり、ドライバが視線を移動させなくても周辺視での確認が容易となり、ドライバへの負担を軽減して、ドライバが運転に集中したまま、自身のリスク認識状態とシステムのリスク認識状態とのズレを直感的に把握することが可能となる。
(もっと読む)
車両用物体検知装置および車両用走行制御装置
【課題】 霧、雪、雨等の悪環境下でも先行車等の目標物を的確に検知できるようにする。
【解決手段】 統合手段M6は、物体検知手段M3が検知した物体のうち、送信から受信までの時間が悪環境判定時間以上の受信波により検知された物体を各物体間の距離に基づいて目標物として統合し、不検知度判定手段M7は統合手段M6により統合された目標物の不検知度を判定し、システムフェイル判定手段M5は悪環境判定手段M4により霧、雪、雨等の悪環境と判定された場合でも、不検知度判定手段M7で判定した目標物の不検知度が判定閾値以下の場合には物体検知手段M3の出力を継続するので、悪環境下でも物体検知手段M3の出力を一律に中止することなく、ACCシステムM9の作動を継続してその機能を最大限に活かすことができる。
(もっと読む)
端末装置
【課題】無線装置の数が増加しても、衝突事故の増加を抑制する技術を提供する。
【解決手段】取得部62は、位置情報を取得する。生成部64は、取得した位置情報が含まれたパケット信号を生成する。ここで、生成部64は、車両に搭載されていることを示した第1識別子あるいは非車両に携帯されていることを示した第2識別子を切りかえながらパケット信号に含ませる。変復調部54、RF部52は、生成したパケット信号を第1の期間において報知する。受付部72は、アクセス制御装置から、第1の期間とは別の第2の期間において、アクセス制御装置において集約された位置情報が含まれたパケット信号を受信する。通知部70は、受信したパケット信号を処理する。
(もっと読む)
車両用走行制御装置
【課題】 物体検知手段の上下方向の検知領域を拡大することなく、車高の低い先行車を制御対象とする車間距離制御を的確に行えるようにする。
【解決手段】 横方向相対速度算出手段M4が自車に対する先行車の横方向の相対速度を算出し、制御対象決定手段M2がレーダー装置15により検知された車間距離が所定距離未満になった先行車を制御対象から解除したときに、前記横方向の相対速度が所定速度以上の場合には、制御対象から解除された先行車の更に前方の先先行車を新たな制御対象として決定するので、制御対象から解除された先行車が自車の直前に存在しないことを確認した上で先先行車を新たな先行車として車間距離制御を継続することが可能となる。これにより、自車が先行車に異常接近して運転者に違和感を与えるのを防止できるだけでなく、車間距離制御が不必要に中止されてしまうのを防止することができる。
(もっと読む)
2,171 - 2,180 / 7,349
[ Back to top ]