
国際特許分類[H02P29/00]の内容
電気 (1,674,590) | 電力の発電,変換,配電 (135,566) | 電動機,発電機,回転変換機の制御または調整;変圧器,リアクトルまたはチョークコイルの制御 (18,002) | 交流電動機および直流電動機双方に適した調整装置または制御装置 (2,020)
国際特許分類[H02P29/00]の下位に属する分類
電源を自動遮断することなく,過負荷に対する保護をするもの,例.監視 (218)
別個の制動機によるもの (1)
国際特許分類[H02P29/00]に分類される特許
51 - 60 / 1,801
回転機の制御装置
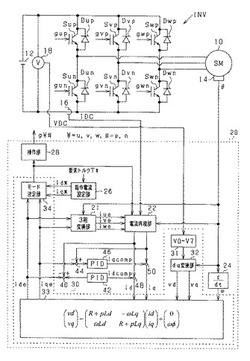
【課題】電流センサの出力値に実際の電流の振幅に対して所定の比率(≠1)だけ相違する誤差であるいわゆるゲイン誤差が含まれる場合、これに起因してモデル予測制御の制御性が低下するおそれがあること。
【解決手段】偏差算出部40,44では、予測電流ide,iqeのそれぞれと同位相の実電流id,iqとの差が算出される。フィードバック制御部42,46のそれぞれでは、偏差算出部40,44の出力値をゼロにフィードバック制御するための操作量(補償量idcomp,iqcomp)が算出される。これら補償量idcomp,iqcompによって、予測部33によって予測される予測電流ide,iqeが補正される。
(もっと読む)
負荷駆動装置および洗濯機

【課題】制御回路を確実にリセット状態にし、電源の再投入を確実に行なう。
【解決手段】本実施形態は、電源入りスイッチが閉成により交流電源が供給されて駆動直流電源を生成する直流電源回路と、駆動直流電源から制御直流電源を生成する制御電源回路と、前記駆動直流電源を基に負荷を駆動する駆動回路と、前記制御直流電源が供給され、動作状態になると前記駆動回路を介して負荷の駆動を制御する制御回路と、前記電源入りスイッチに並列に接続され、該制御回路が動作状態になると閉成動作され、電源切りスイッチが操作されると開放復帰される常開形のスイッチ手段と、前記電源入りスイッチに直列に接続され、前記スイッチ手段の閉成動作と同時に若しくはこれより遅れて開放動作し、前記制御回路が制御直流電源の喪失によりリセット状態になった後に閉成復帰する常閉形のスイッチ手段とを具備する。
(もっと読む)
誤差周波数成分取得装置、回転角度取得装置、モータ制御装置および回転角度取得方法
【課題】レゾルバを用いてロータ回転角度を検出する装置において、調整者の負担を軽減しつつ、誤差の小さいロータ回転角度を得られるようにする。
【解決手段】角度測定値取得部210が、モータ軸の回転角度測定値を取得し、誤差算出部220が、複数の回転角度測定値の各々に含まれる誤差を算出する。そして、周波数成分取得部230が、複数の誤差から、誤差の周波数成分の位相および振幅を求める。これによって、誤差周波数成分取得装置121は、回転角度測定値に含まれる誤差の周波数成分の位相および振幅を自動的に算出することができ、当該位相および振幅を用いて回転角度測定値に対する補正を行うことができる。従って、調整者の負担を軽減しつつ、誤差の小さいロータ回転角度を得ることができる。
(もっと読む)
モータ制御装置
【課題】単相のエンコーダ信号によって三相スイッチング制御を実行する。
【解決手段】エンコーダ8は、二相のエンコーダ信号PA、PBを出力する。二相制御手段17は、両方のエンコーダ信号PA、PBに同期して励磁相を切換える。ひとつのエンコーダ信号だけが失われると、単相制御手段18によってモータ7が制御される。単相制御手段18は、失われたエンコーダ信号に代わって切換時期を推定する推定手段23を備える。単相制御手段18は、初期にオープン制御手段25によるオープン制御を実行する。オープン制御によってモータ7の回転が安定すると、単相フィードバック制御手段24による制御へ移行する。単相フィードバック制御手段24は、正常なエンコーダ信号と、推定された切換時期との両方に応答して励磁相を切換える。この結果、単相だけでもモータ7の制御が実行される。
(もっと読む)
電動機制御装置
【課題】駆動機構における慣性モーメント又は慣性質量、及び多慣性モデルのいずれも未知もしくは変動し得る場合でも、各種パラメータを調整することなくロバスト性の高い電動機の駆動制御を可能にする。
【解決手段】電流制御系ループにおいて、慣性変動抑制部3が第1外乱オブザーバ31を用いて推定した電動機200の外乱トルクを、第1トルク指令に加算して第2トルク指令を出力する。また、慣性変動抑制部3において外乱トルクを推定する第1外乱オブザーバ31が、電動機200の電動機速度に対応して駆動機構500の機械共振の影響を抑制した理想電動機の加減速トルク信号を出力する共振抑制モデル43を備えている。第1外乱オブザーバ31が、この理想電動機の加減速トルク信号を利用して外乱トルクを推定することで、慣性変動抑制部3は駆動機構500の機械共振に起因する振動を生じることなく駆動機構の慣性モーメントの変動を抑制する。
(もっと読む)
画像形成装置
【課題】モータ負荷異常検出時であっても、負荷トルクを低減させるモータ駆動制御を行うことにより、一定の利便性・生産性を確保する画像形成装置を提供する。
【解決手段】本発明に係る画像形成装置は、入力された回転速度制御信号に応じて回転速度を切替えるモータと、モータに対し回転速度制御信号を出力する出力手段と、モータの回転速度に応じて線速を調整する調整手段と、モータから該モータが前記回転速度制御信号の回転速度で回転していないことを示す信号を検知する検知手段とを備え、出力手段は、モータに対し、第1の回転速度制御信号よりも低い回転速度で前記モータを駆動させる第2の回転速度制御信号を出力し、調整手段は、出力手段により第2の回転速度制御信号が出力されたとき、該回転速度に応じて画像形成に関する線速を調整する。
(もっと読む)
キャパシタプリチャージ回路、モータ駆動システム、電動パワーステアリングシステム、エアバッグシステム
【課題】キャパシタプリチャージ回路における損失(発熱)を低減させ、回路を小型化する。
【解決手段】本発明に係るキャパシタプリチャージ回路は、スイッチドキャパシタ分圧回路を用いて電源電圧を分圧することにより、チャージ対象であるキャパシタの両端電圧を抑制しながら充電する。
(もっと読む)
サーボモータ制御装置
【課題】サーボモータへ流れる大電流を検出する場合においても高精度な電流検出を行うことができるサーボモータ制御装置を得ること。
【解決手段】サーボモータ制御装置は、サーボモータに流れる電流を検出する電流検出部6を備えており、この電流検出部6が検出する電流値を用いてサーボモータの制御を行う。電流検出部6は、基板90とは別に設けられて電力供給部からの電力をサーボモータに供給するとともに電流検出の際の電流検出抵抗の役割をする抵抗兼用導体51と、この抵抗兼用導体の所定の2箇所に接続された電流検出端子58,59に出力される電圧からサーボモータに流れる電流を検出する電流検出器とを有する。
(もっと読む)
モータシステムおよびモータ制御装置
【課題】複数機種のモータが接続可能なモータ制御装置を有するモータシステムにおいて、モータ側の記憶容量を低減させるとともに、電源投入時等の初期動作の時間を短くすることが可能なモータシステムを提供する。
【解決手段】モータシステム1において、複数機種のモータ2が接続可能なモータ制御装置3は、モータ2の機種ごとに設定される複数の制御パラメータ群14a〜14eが記憶される記憶部11と、モータ2を駆動制御するモータ制御部10を備え、モータ2は、モータ2の機種コードが記憶されるモータ側記憶部7を備えている。モータ制御装置3は、モータ側記憶部7に記憶されている機種コードを読み出して、読み出された機種コードに対応する制御パラメータ群14a〜14eを記憶部11の中から選択するとともに、選択された制御パラメータ群14a〜14eの各制御パラメータをモータ制御部10に設定してモータ2を制御する。
(もっと読む)
モータ駆動装置及びこれを備えたポンプ
【課題】高速で細かな回転数制御ができる上にスイッチングロスを低減することができるものとする。
【解決手段】モータ出力レベルについての指示が入力される指示入力部2と、前記指示入力部に入力された指示入力に応じて出力される信号レベルに応じてモータ電圧を制御するモータ電圧制御部40と、前記指示入力部から出力される信号レベルに応じて前記モータの動作をPWM制御するモータ制御部6とを有する。上記モータ電圧制御部40はPWM制御のデューティ比が所定の値以下となるときにモータ電圧を下げる。
(もっと読む)
51 - 60 / 1,801
[ Back to top ]