
国際特許分類[H02P29/00]の内容
電気 (1,674,590) | 電力の発電,変換,配電 (135,566) | 電動機,発電機,回転変換機の制御または調整;変圧器,リアクトルまたはチョークコイルの制御 (18,002) | 交流電動機および直流電動機双方に適した調整装置または制御装置 (2,020)
国際特許分類[H02P29/00]の下位に属する分類
電源を自動遮断することなく,過負荷に対する保護をするもの,例.監視 (218)
別個の制動機によるもの (1)
国際特許分類[H02P29/00]に分類される特許
31 - 40 / 1,801
モーター制御装置、ロボットハンド、ロボット及びモーター制御方法
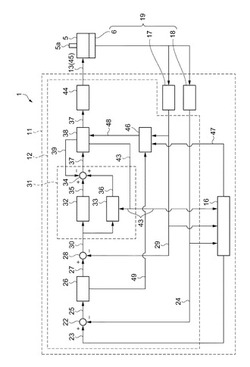
【課題】回転軸の速度制御をしながらトルク限定値を超えないトルクで回転させるモーターの制御装置を提供する。
【解決手段】モーター5の回転軸5aの回転状況を検出する回転検出器19が出力する角度データ信号24及び回転速度信号29を用いてモーター5を制御する。回転軸5aの速度指令27と回転速度信号29とを用いて回転軸5aの回転速度と速度指令27との差に対応するトルク指令信号37を出力する速度制御部31と、回転軸5aに加えるトルクの最大値を示すトルク限定値を設定する限定値設定部46と、トルク指令信号37により駆動される回転軸5aのトルクをトルク限定値以下に制限するトルク限定制御部38と、を備える。
(もっと読む)
球面モータの制御装置および球面モータの制御方法

【課題】3自由度以上の回転が可能な球面モータの動作制御を直感的に把握し易い状態で行う。
【解決手段】任意の方向に回転が可能な概球回転体の運動に係る信号出力に基づき、球面モータ300のロータを動作させるために、球面モータ300の界磁コイル309への通電パターンを生成する界磁コイル通電パターン生成部201と、前記通電パターンに基づく駆動信号を出力する駆動信号出力部202とを備える。
(もっと読む)
モータ制御装置およびトルク値取得方法
【課題】モータ制御装置において、必要メモリ容量の増大を抑制しつつ、より精度よくモータのトルク値を求められるようにする。
【解決手段】記憶部131は、トルク指令値を電流指令値に変換するための電流指令テーブルを記憶する。そして、トルク値取得部160は、当該電流指令テーブルを参照して、モータ電流値をトルク値に変換することで、モータのトルク値を取得する。トルク値取得部160は、モータ制御のために用意される電流指令テーブルを参照するので、トルク値取得のためのテーブルを別途設ける必要がない。従って、記憶部131のメモリ容量を増やす必要がない。また、トルク値取得部160は、モータMの特性を詳細に示す電流指令テーブルを参照してトルク値を求めるので、数式に基づいてトルク値を求める場合との比較において、より短い時間で、より高精度なトルク値を取得できる。
(もっと読む)
異常検出装置
【課題】 サーボモータによって駆動される被駆動部の異常部位を特定可能な異常検出装置を提供する。
【解決手段】 本発明の異常検出装置は、サーボモータの位置情報が位置検出器から入力される入力部と、位置情報を周波数変換する周波数変換部と、周波数変換された所定周波数における振幅と被駆動部の異常を判定する閾値とを比較する比較判定部と、を有し、比較判定部は、所定周波数における振幅が被駆動部の異常を判定する閾値以上となる周波数から被駆動部の異常部位を特定する。
(もっと読む)
駆動回路のための供給電圧スイッチの性能を検査する方法、および装置
【課題】駆動回路の供給電圧スイッチの性能を検査する方法及び装置を提供する。
【解決手段】ポジショナシステム1は、アクチュエータ2と、アクチュエータ2を駆動する駆動回路3と、駆動回路3に電気的エネルギーが供給されるように駆動回路3に直列に接続された供給電圧スイッチ4と、供給電圧スイッチ4が閉じるよう駆動される場合に、アクチュエータ2の駆動のために十分な電圧が駆動回路3内で検出されるかによって、供給電圧スイッチ4の性能を確認するための制御ユニット5を具備する。
(もっと読む)
電動過給機の異常検出装置と検出方法
【課題】電動機の経時劣化を迅速かつより正確に検出する電動過給機の異常検出装置と異常検出方法を提供することを目的とする。
【解決手段】電動機によりコンプレッサを駆動して内燃機関の過給を行う電動過給機の異常検出装置であって、直流電源から前記電動機に供給される電力または電流に対して、電動機の定格回転速度を定める電動機定格回転速度導出手段(61,62)と、前記定格回転速度と実回転速度との差分が閾値以上の場合に異常検出信号を発生する異常有無判定手段(63)と、を備える。
(もっと読む)
電動機の制御装置、制御システム及び制御方法
【課題】電動機のトルクを、安定して高い精度で制御できる、電動機の制御装置、制御システム及び制御方法を提供する。
【解決手段】永久磁石同期電動機の回転軸に、半導体歪みセンサの出力を無線送信する無線送信装置を取り付ける一方、電動機本体に無線送信装置からの送信を受信する無線受信装置を設ける。電動機を駆動制御する制御装置は、無線送受信装置を介して歪みセンサの出力を入力し、電動機のトルクを検出し、トルク検出値とトルク指令値との偏差に基づき、電動機のPWM制御信号を演算して出力する。これにより、電動機における電流とトルクとの相関が、永久磁石の温度変化や劣化によって変動しても、電動機のトルクを高精度に制御できる。
(もっと読む)
SRモータ用制御装置
【課題】SRモータに制御電流を供給する各ハーフブリッジ回路の使用特性を考慮した上で、各ハーフブリッジ回路をパワーモジュールに実装することを目的とする。
【解決手段】
SRモータ用制御装置1は、スター結線されたSRモータのU相、V相およびW相コイル(U,V,W)、ならびに各コイルの中性点Nにそれぞれ接続されるとともに、電源の正極および負極に接続されSRモータMの各コイル(U,V,W)に制御電流を供給するスイッチ回路30が実装されたスイッチ装置40を備える。
スイッチ回路30は、第1から第4のハーフブリッジ回路(2〜5)より構成され、スイッチ装置40は、第1から第4のハーフブリッジ回路(2〜5)のうち第1のハーフブリッジ回路2が独立して実装された第1のパワーモジュール110を備えていることを特徴とする。
(もっと読む)
位置検出装置、回転式アクチュエータ、および、それを用いたシフトバイワイヤシステム
【課題】パルス信号の出力に関する異常が生じても可動部材の位置の検出を継続可能な位置検出装置を提供する。
【解決手段】エンコーダ40は、モータ軸21が回転するのに応じ、所定の位相差を有する3相のパルス信号を出力する。ECU3は、カウント値を保持し、エンコーダ40が出力する3相のパルス信号のすべてが正常のとき出現する各パルス信号の組み合わせパターンである正常時パターン、および、3相のパルス信号のうち1相のパルス信号が異常のときのみ出現する各パルス信号の組み合わせパターンである異常時パターンに基づき、前記カウント値に対し第1所定値「1」、または、第2所定値「2」を加算または減算する。ECU3は、前記カウント値に基づき、モータ軸21の回転位置を検出する。
(もっと読む)
モータ制御装置、及びモータ制御方法
【課題】コアを有するモータを制御する際の位置決め精度を向上させるモータ制御装置、及びモータ制御方法を提供する。
【解決手段】コイルが巻回されたコアを有するモータを制御するモータ制御装置は、前記モータの可動子の位置から電気角を算出する電気角算出部と、前記電気角算出部が算出した電気角に応じた制御ゲインを用いて、前記モータの駆動を制御する制御部とを具備する。
(もっと読む)
31 - 40 / 1,801
[ Back to top ]