
国際特許分類[H02P29/00]の内容
電気 (1,674,590) | 電力の発電,変換,配電 (135,566) | 電動機,発電機,回転変換機の制御または調整;変圧器,リアクトルまたはチョークコイルの制御 (18,002) | 交流電動機および直流電動機双方に適した調整装置または制御装置 (2,020)
国際特許分類[H02P29/00]の下位に属する分類
電源を自動遮断することなく,過負荷に対する保護をするもの,例.監視 (218)
別個の制動機によるもの (1)
国際特許分類[H02P29/00]に分類される特許
41 - 50 / 1,801
電動機の巻線過熱防止装置および電動機の制御装置
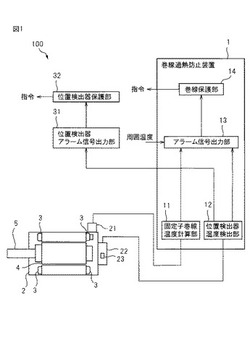
【課題】電動機の固定子巻線の過熱を防止し電動機を効率よく駆動させる低コストの巻線過熱防止装置および電動機の制御装置を実現する。
【解決手段】電動機2の制御装置100内に設けられる巻線過熱防止装置1は、電動機2の固定子巻線3に流れる電流から推定される固定子巻線3の温度変化量と電動機2の周囲温度とに基づき巻線温度を計算する固定子巻線温度計算部11と、電動機2の回転子4の位置情報を検出する位置検出器22内の温度検出素子23が示す温度を検出する位置検出器温度検出部12と、巻線温度がアラームレベルを超えたときアラーム信号を出力するアラーム信号出力部13であって、アラームレベルは、周囲温度が所定の温度以下の場合には温度変化量の最大値と周囲温度とに基づき規定された温度であり、周囲温度が所定の温度より高い場合には位置検出器22を過熱から保護するための温度であるアラーム信号出力部13とを備える。
(もっと読む)
可変速発電電動機の異常検出装置及び異常検出方法

【課題】 地絡発生前に警報を発して事故を未然に防止することができる可変速発電電動機の異常検出装置および異常検出方法を提供する。
【解決手段】 可変速発電電動機1の回転子2の回転位相および系統電圧位相に係る運転情報を取得する運転情報入力手段17と、可変速発電電動機1の運転中に発生する部分放電に起因した信号を含む1次信号を検出する部分放電センサ15aと、1次信号から部分放電の特徴を有する2次信号を検出する部分放電検出手段16と、2次信号と回転位相および系統電圧位相との同期性を比較することで、可変速発電電動機1の固定子コイル11の部分放電と回転子コイル6の部分放電とを識別する異常判定手段18とを備えた。
(もっと読む)
モータ制御回路及び該回路を実装したサーボ装置
【課題】モータ駆動制御用の駆動周波数を任意に変更して所望の操作感覚でサーボ装置を操縦すること。
【解決手段】受信機20を介して送信機10から制御信号として周波数設定信号を受信すると、予め記憶した駆動周波数設定情報のうち、受信した周波数設定信号に応じた情報を選択する。また、送信機10から制御信号である操縦信号を入力すると、選択された駆動周波数設定情報に基づき、パルス幅比較部34bから差分データタイミング信号に同期して取り込んだ差分データ信号を、選択された駆動周波数に対応するように周波数変換処理する。そして、得られた差分データ変換信号を周波数処理情報に基づき所定のカウント範囲まで使用して駆動信号を生成し、駆動機構32の駆動制御を行う。
(もっと読む)
モータ駆動装置
【課題】設定内容とともに設定に必要となる関連情報を同時表示する設定表示装置を用いることで簡便かつ迅速な設定を可能とするモータ駆動装置を提供する。
【解決手段】設定表示装置20によりモータ駆動に関する設定が行われるモータ駆動装置1であって、この設定表示装置20は、ある設定項目の設定内容を変更する際に、設定項目の設定内容を表示し、さらに設定項目に関連する少なくとも1以上の関連項目の関連情報を表示するようにした。
(もっと読む)
油圧制御装置及びそれを備えた四輪駆動車両の駆動力配分装置
【課題】電動モータの故障を高い精度で検知できると共に、電動モータの正常状態を故障と誤検知する確率を低く抑えることができるようにする。
【解決手段】モータ(電動モータ)(37)により駆動されるオイルポンプ(35)から供給される油圧によって前後トルク配分用クラッチ(10)の作動制御を行う四輪駆動車両用の油圧制御装置(60)において、モータ(37)の故障判定を行うモータ故障判定手段(50)は、モータ(37)の故障検知開始時点(t2)からモータ(37)の駆動電流値(I)を積算したモータ駆動電流積算値(Is)の算出を行うと共に、モータ故障判定用の閾値(Ith)を所定の割合で増加させる。そして、モータ駆動電流積算値(Is)が闇値(Ith)以下となった場合、故障確定タイマ(Tm2)のカウント完了を待ってモータ(37)の故障確定判定を行う。
(もっと読む)
モータ制御装置及び画像形成装置
【課題】高速且つ高精度に駆動対象を目標位置に停止可能とする。
【解決手段】モータ制御ユニットは、モータに入力可能な電流上限値を推定し、この上限値に対応する駆動電流でモータを駆動する第一制御処理(S140,S150)を実行する。また、第二制御処理(S210,S220)では、電流上限値よりも小さい偽の電流上限値を、電流上限値の算出式に用いる係数を切り替えることで算出し、その偽の電流上限値に対応する駆動電流でモータを駆動する。そして、第三制御処理(S300)では、第二制御処理終了時の駆動対象の位置P及び速度Vに基づき、定速区間及び減速区間の目標プロファイルを設定し、駆動対象の位置及び速度が、目標プロファイルが示す位置及び速度を追従するように、モータに対する電流指令値を調整する。これによって第三制御処理の初期に電流指令値が電流上限値を超えないようにモータ制御を実行し、駆動対象を目標位置に停止させる。
(もっと読む)
主軸駆動用モータの制御装置
【課題】主軸にかかる負荷が大きい場合はモータと主軸との間にスリップが発生し、主軸位置検出結果をモータ速度のフィードバック制御に利用するとモータ速度の制御が不安定になるという問題が生じていた。
【解決手段】本発明の制御装置は、位置指令値に従って速度指令値を出力する位置制御部と、前記速度指令値に従って電流指令値を出力する速度制御部と、モータに流れる電流を検出する電流検出部と、電流に基づいてモータの第1速度を推定する第1速度推定部と、センサにより検出される主軸位置に基づいて算出される主軸速度及び変速比に基づいてモータの第2速度を推定する第2速度推定部と、モータ負荷の値を算出する負荷演算部と、を有し、速度制御部は、モータ負荷の値が所定の値以上の場合は第1速度を用い、所定の値未満の場合は第2速度を用いて電流指令値を算出する、ことを特徴とする。
(もっと読む)
回転機の制御装置
【課題】電流センサの出力値に実際の電流の振幅に対して所定の比率(≠1)だけ相違する誤差であるいわゆるゲイン誤差が含まれる場合、これに起因してモデル予測制御の制御性が低下するおそれがあること。
【解決手段】偏差算出部40,44では、予測電流ide,iqeのそれぞれと同位相の実電流id,iqとの差が算出される。フィードバック制御部42,46のそれぞれでは、偏差算出部40,44の出力値をゼロにフィードバック制御するための操作量(補償量idcomp,iqcomp)が算出される。これら補償量idcomp,iqcompによって、予測部33によって予測される予測電流ide,iqeが補正される。
(もっと読む)
負荷駆動装置および洗濯機
【課題】制御回路を確実にリセット状態にし、電源の再投入を確実に行なう。
【解決手段】本実施形態は、電源入りスイッチが閉成により交流電源が供給されて駆動直流電源を生成する直流電源回路と、駆動直流電源から制御直流電源を生成する制御電源回路と、前記駆動直流電源を基に負荷を駆動する駆動回路と、前記制御直流電源が供給され、動作状態になると前記駆動回路を介して負荷の駆動を制御する制御回路と、前記電源入りスイッチに並列に接続され、該制御回路が動作状態になると閉成動作され、電源切りスイッチが操作されると開放復帰される常開形のスイッチ手段と、前記電源入りスイッチに直列に接続され、前記スイッチ手段の閉成動作と同時に若しくはこれより遅れて開放動作し、前記制御回路が制御直流電源の喪失によりリセット状態になった後に閉成復帰する常閉形のスイッチ手段とを具備する。
(もっと読む)
モータ制御装置及び電動パワーステアリング装置
【課題】通電不良の発生に伴う二相駆動時のモータ回転を円滑化して安定的に高い出力性能を確保することのできるモータ制御装置及び電動パワーステアリング装置を提供すること。
【解決手段】マイコンは、所定のサンプリング周期で取得した各電流センサの出力信号に基づいて、モータの各相電流値を検出する。そして、今回の検出値とともに少なくとも前回の検出値が保持される。そして、当該二相駆動時には、今回の電流検出時における回転角と前回の電流検出時における回転角との間に漸近線に対応する所定の回転角を挟む場合には、その保持された今回の検出値及び前回の検出値について、その絶対値がより大きな値となるように補正する。
(もっと読む)
41 - 50 / 1,801
[ Back to top ]