
国際特許分類[H02P29/00]の内容
電気 (1,674,590) | 電力の発電,変換,配電 (135,566) | 電動機,発電機,回転変換機の制御または調整;変圧器,リアクトルまたはチョークコイルの制御 (18,002) | 交流電動機および直流電動機双方に適した調整装置または制御装置 (2,020)
国際特許分類[H02P29/00]の下位に属する分類
電源を自動遮断することなく,過負荷に対する保護をするもの,例.監視 (218)
別個の制動機によるもの (1)
国際特許分類[H02P29/00]に分類される特許
11 - 20 / 1,801
冷却ファン、制御方法及び電子機器
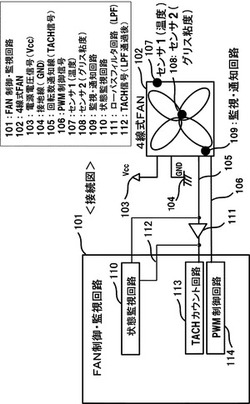
【課題】 冷却ファンなどの寿命部品における保全情報を利用する技術を提供する。
【解決手段】 寿命を予測するために必要な寿命情報を収集するセンサと、この前記寿命情報を他の情報のための信号線に重畳して送出する監視・通知手段とを備える冷却ファンと、前記信号線から前記寿命情報の成分を除くフィルタと、前記寿命情報に基づいて、冷却ファンの寿命を予測する状態監視手段とを備える電子機器。また、寿命を予測するために必要な寿命情報を収集するセンサと、前記寿命情報を他の情報のための信号線に重畳して送出する監視・通知手段とを備える冷却ファン。
(もっと読む)
電動機の駆動装置

【課題】駆動装置側に複数種類の通信プロトコルに応じた通信部及び検出プログラムを備えることで、使用する検出器の選択肢を拡大する。
【解決手段】電動機の可動子の位置または速度を検出するエンコーダの検出データを、エンコーダとの間のシリアル通信により取得し、前記検出データを用いて電動機を駆動する駆動装置において、複数のエンコーダ2a,2b,2cがそれぞれ有する複数種類の通信プロトコルに従って前記検出データを送受信可能な複数の通信部3331a,3331b,3331cと、これらの通信部を介して受信した前記検出データを処理する複数の検出プログラム3342a,3342b,3342cとを備え、各通信プロトコルに従って送信されたデータ要求コマンドに対する応答データが正しいことをもってエンコーダの通信プロトコルを同定する。
(もっと読む)
アクチュエータ制御装置、アクチュエータシステム、アクチュエータ制御方法及び制御プログラム
【課題】アクチュエータを構成する機械要素の支障を検出する。
【解決手段】制御装置10は、アクチュエータが正常に駆動するとみなされる場合の基準タイミングと、その基準タイミングにおいてモータ32に流れる電流値(基準電流値)とを対応付けた診断基準データを生成する。また、制御装置10は、支障診断時にアクチュエータが駆動する場合の検出タイミングと、その検出タイミングにおいてモータ32に流れる電流値(検出電流値)とを対応付けた診断対象データを生成する。更に、制御装置10は、同一タイミングである検出タイミングと基準タイミングとに対応づけられた検出電流値と基準電流値との差分の絶対値を算出し、その算出値が差分閾値より大きい場合には、検出タイミングにおけるスライダの位置を支障位置として算出し、機械要素の支障を通知する。
(もっと読む)
回転駆動装置及びロボット装置
【課題】高度な制御が実現でき、産業ロボット等に好適な回転駆動装置を提供する。
【解決手段】トラクション方式の減速機30や指令信号に基づいてモータ20の出力を制御する駆動制御機構40を備えた回転駆動装置10である。減速機30の入力側に第1ロータリエンコーダ22、減速機30の出力側に第2ロータリエンコーダ33を有している。駆動制御機構40は、指令信号Scと第1検出信号S1とに基づいてモータ20の出力を制御する制御信号Sdを生成する出力制御部43、制御信号Sdに従うドライバ44、第1検出信号S1と第2検出信号S2とを比較して、減速機30の入力と出力との間の誤差を演算する誤差演算部45を有している。出力制御部43が誤差演算部45の演算結果に基づいて制御信号Scを補正する。
(もっと読む)
モータの異常診断装置
【課題】簡単な構成でモータに発生したガタ等の異常を正しく診断することができるモータの異常診断装置を提供する。
【解決手段】モータ10に駆動信号を出力するモータドライバ20と、モータの回転速度を検出する回転速度検出センサ30と、モータドライバに指令信号を出力するコントローラ22とを備え、コントローラ22は、モータの回転を周期的に変化させる異常診断指令信号を出力し、異常診断指令信号によってモータドライバを介してモータの回転が周期的に変化したときの回転速度検出センサからの回転速度検出信号を時系列的に順次取り込み、取り込まれた回転速度検出信号に基づき、異常の診断を行う。
(もっと読む)
電動機の位置制御装置
【課題】位置指令と位置検出の差演算に基づいて位置制御すると、任意の回転方向を指定しての位置制御ができず、また検出器の分解能によっては安定に位置制御ができない。
【解決手段】位置指令と1サンプリング分遅延させた信号との偏差信号を求め、この偏差信号と回転方向を設定する信号を入力して回転方向に対応して補正された信号を出力する回転方向指定指令補正部を設ける。回転方向指定指令補正
部により補正された信号と位置検出との偏差信号を求めて位置制御信号とする。
また、位置検出器の出力側に位置座標系変換部を設けることで、任意の座標系で位置制御を可能とする。さらに、分解能補正処理部を設けることにより安定性を向上することを可能としたものである。
(もっと読む)
モータを制御するための方法およびシステム
【課題】DCバス電圧利用率を確保するために、可能な限り大きなモータトルクを確保する電圧振幅および電圧位相角の適した点を迅速に決定する方法およびシステムを提供する。
【解決手段】モータ10を制御するための方法は、モータの電気信号を信号ユニット60によって入手するステップを含む。電気信号は、モータトルクおよび角速度を含む。電圧ベクトルの電圧位相角を計算機器によって計算するステップをさらに含む。コマンドトルクTcmd、モータトルク、角速度、および電圧ベクトルの電圧振幅が、計算機器の入力である。方法は、インバータ20を制御するスイッチング信号へと電圧位相角および電圧振幅を変調器40によって変調するステップをさらに含む。方法は、スイッチング信号にしたがって電圧ベクトルへと直流電圧をインバータによって変換するステップ、およびモータへ電圧ベクトルを印加するステップをさらに含む。
(もっと読む)
モータ制御装置
【課題】モータ制御用のプログラムがオンボード形式で適切に書き込まれた記憶素子を実装したモータ制御装置を提供する。
【解決手段】本発明のモータ制御装置1によれば、モータ2を駆動するための制御用プログラム15が書き込まれるメモリ13が配置された回路基板10と、回路基板10に形成され、メモリ13に制御用プログラム15を書き込むために電気信号を出力するコンタクトプローブ34が接触するランド18と、コンタクトプローブ34から出力された電気信号をランド18からメモリ13に伝送する導通パターン19とを備え、ランド18は、スルーホール18aを有し、スルーホール18aにコンタクトプローブ34を嵌合させることによってコンタクトプローブ34と接触する。
(もっと読む)
電気モータ制御装置
【課題】固定容量型のポンプを使用しつつ、レバーの操作量に応じた速度でアクチュエータを駆動する。
【解決手段】電気モータの回転速度を制御する電気モータ制御装置であって、ポンプの吐出圧が最高負荷圧よりも所定の設定圧だけ高くなるように、最高負荷圧に基づいて電気モータの暫定目標回転速度を算出し(S74)、ポンプの吐出圧に基づいて、電気モータの出力トルクがその吐出圧のときに出力可能な最大トルクとなる電気モータの回転速度を上限回転速度として算出し(S75)、暫定目標回転速度と上限回転速度とのうち、低いほうを電気モータの目標回転速度として算出し(S76)、電気モータの回転速度が目標回転速度となるように、電気モータの回転速度を制御する(S77)ことを特徴とする。
(もっと読む)
駆動制御装置と画像形成装置
【課題】 動作部を安定して動作させる場合に不必要に低速で動作してしまうことのないようにする。
【解決手段】 CPU61は、インク関連動作制御部73を制御してインク関連動作部58を駆動させ、NVRAM64の動作実施回数を加算し、センサ57からの信号に基いて正常動作終了を検出した場合、NVRAM64の正常動作終了回数を加算し、NVRAM64の動作実施回数が判定基準回数以上の場合、(動作OK回数/動作実施回数)の値を算出し、その値がNVRAM64の正常判定閾値以上の場合、加速度に調整加速度を加算して新たな加速度にする。また、(動作OK回数/動作実施回数)の値が異常判定閾値以下の場合、加速度から調整加速度を減算して新たな加速度にする。
(もっと読む)
11 - 20 / 1,801
[ Back to top ]