
国際特許分類[H04N7/18]の内容
電気 (1,674,590) | 電気通信技術 (544,871) | 画像通信,例.テレビジョン (280,882) | テレビジョン方式[4,2011.01] (43,981) | 閉回路テレビジョン方式,すなわち信号が放送されない方式 (7,055)
国際特許分類[H04N7/18]に分類される特許
111 - 120 / 7,055
画像生成方法、画像生成装置、及び操作支援システム
【課題】旋回動作可能な被操作体に取り付けられる撮像手段が撮像する入力画像に基づいて生成される出力画像を見易く表示する画像生成装置を提供すること。
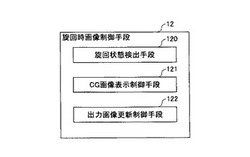
【解決手段】旋回動作可能な上部旋回体63に取り付けられたカメラ2が撮像する入力画像に基づいて出力画像を生成する画像生成装置100は、上部旋回体63の旋回状態を検出する旋回状態検出手段120と、上部旋回体63のCG画像70を出力画像上に重畳表示するCG画像表示制御手段121と、出力画像の更新状態を制御する出力画像更新制御手段122と、を備え、旋回状態検出手段120が旋回の開始を検出した場合に、CG画像表示制御手段121はCG画像70を出力画像上で旋回させる。
(もっと読む)
画像表示装置、画像表示システム、画像表示方法、及び画像表示プログラム

【課題】被写体の位置関係を容易に把握できる画像表示装置、画像表示システム、画像表示方法又は画像表示プログラムを提供する。
【解決手段】座標情報算出部は画像信号が表す被写体の座標情報を算出し、撮影画像合成部は前記座標情報算出部が算出した座標情報に基づいて前記入力された画像信号をある視点からの画像を表す合成撮影画像信号を生成し、干渉判定部は前記撮影画像合成部が生成した合成撮影画像信号と予め定めた被写体を表す基準画像信号とが干渉するか否かを判定し、視点更新部は前記干渉判定部が前記合成撮影画像信号と前記基準画像信号が干渉すると判定した場合、前記視点を更新する。
(もっと読む)
ステレオカメラ及びステレオカメラの校正方法
【課題】障害物までの距離を測距するステレオカメラが取り付けられたガラスに歪みが発生しても、光軸のずれによる測距精度の低下を抑制する。
【解決手段】フロントガラス10の上部内面に、独立した左右一対のカメラ12L及び12Rを取り付けると共に、カメラ12L及び12Rの間に位置するフロントガラス10の内面に、歪み検出方向が異なるように配置された2つの歪みセンサ16及び18を取り付ける。そして、制御装置20は、歪みセンサ16及び18で検出した歪みA及びBと補正値とを関連付けた補正マップを参照し、カメラ12L及び12Rで撮像された一対の画像について、矩形領域の部分画像を切り出す位置を補正値だけずらすことで、光軸のずれを校正して測距精度の低下を抑制する。
(もっと読む)
車載カメラ用画像補正方法および車載カメラ用画像補正プログラム
【課題】形状や寸法が既知の図形を用いることなく車載カメラの現在の取り付け角度を求めることができる車載カメラ用画像補正方法および車載カメラ用画像補正プログラムを提供する。
【解決手段】車載カメラ用画像補正方法は、車両に取り付けられたカメラが車両の周囲を撮像するステップS1と、カメラにより撮像された画像内の路面画像にもとづいて動きベクトルを検出するステップS5と、検出された動きベクトルを、真上視点の動きベクトルとなるように車両の進行方向軸、路面法線方向軸ならびに進行方向軸および路面法線方向軸に直交する路面平行方向軸の3軸の各軸周りに独立に回転補正させるための式である真上視点の動きベクトルへの変換式を作成するステップS6と、真上視点の動きベクトルへの変換式からカメラの車両に対する取り付け角度を求めるステップS7と、を有する。
(もっと読む)
画像処理装置、画像処理方法及びプログラム
【課題】対象物体の追尾を適切に打ち切る。
【解決手段】消失領域設定部602は、撮像部601により撮像された画像データに対して領域を設定する。物体追尾部603は、画像データ内における対象物体を追尾し、対象物体が前記領域内に入った場合、対象物体の追尾を停止する。
(もっと読む)
物体検出装置を搭載する移動体
【課題】演算コストがより低い物体検出装置を搭載する移動体を提供すること。
【解決手段】本発明に係るショベル60は、ショベル60の動作状態を検出する動作状態検出部65と物体検出装置100とを備える。物体検出装置100は、複数のカメラのそれぞれが撮像するカメラ画像の視差に基づいて物体を検出する。また、物体検出装置100は、被撮像空間を通る仮想直線上の複数の検査点のうちの1つに対応する画素を含む部分画像をカメラ画像から抽出する部分画像抽出部10と、同一の検査点に対応する各カメラ画像の部分画像同士の類似度に基づいて検査点に関する評価値を決定する評価値決定部11と、評価値決定部11が決定する評価値を用いて物体の存否を判定する物体存否判定部12とを備える。仮想直線は、ショベル60の動作状態に応じて配置される。
(もっと読む)
インターホンシステム
【課題】 映像を複数の機器で分散処理して従来通りのスペックのCPUやメモリで高速な画像処理を行って人物の検知を行い、誤報の少ないインターホンシステムを提供する。
【解決手段】 玄関子機1は、カメラ11にて撮影された映像から移動体を抽出した特徴画像を生成して居室親機2に伝送する子機映像処理部15と、一定時間前からの映像を記憶するメモリ17とを有する一方、親機CPU27に玄関子機1から伝送された特徴画像から移動体が人物であるか判断する機能を設けると共に、人物である場合は玄関子機1のメモリ17に記憶されている一定時間前からの録画映像を入手してフラッシュメモリ26に録画制御すると共に、モニタ21に現在の撮像映像を表示させる。
(もっと読む)
物体検出方法及び物体検出装置
【課題】演算コストがより低い物体検出装置を提供すること。
【解決手段】2つのカメラ2a、2bのそれぞれが撮像するカメラ画像2aR、2bRの視差に基づいて物体50を検出する物体検出装置100は、被撮像空間を通る仮想直線VL上の複数の検査点IP1〜IP5のうちの1つIP1に対応する画素を含む部分画像2aR1、2bR1をカメラ画像2aR、2bRから抽出する部分画像抽出部10と、同一の検査点IP1に対応するカメラ画像2aR、2bRの部分画像2aR1、2bR1同士の類似度に基づいて検査点IP1に関する評価値CGRAを決定する評価値決定部11と、評価値決定部11が決定する評価値を用いて物体50の存否を判定する物体存否判定部12とを備える。
(もっと読む)
車両周辺監視装置
【課題】通常の俯瞰画像だけでなく、その部分拡大俯瞰画像もモニタ表示する際、それぞれの表示目的に適合した俯瞰画像が生成される車両周辺監視装置の提供。
【解決手段】車載カメラモジュールによって取得された撮影画像を元画像として二次平面射影変換によって第1俯瞰画像を生成する第1俯瞰画像生成部と、撮影画像を元画像として三次面射影変換によって第2俯瞰画像を生成する第2俯瞰画像生成部と、第1俯瞰画像からモニタ表示用の第1表示画像を生成するとともに、当該第1表示画像の所定領域に対応する第2俯瞰画像の所定領域から第1表示画像より大きな表示倍率を有するモニタ表示用の第2表示画像を生成する表示画像生成部とを備えている。
(もっと読む)
携帯端末装置
【課題】ユーザの操作や特定の環境を走行することなく、精度良く外界状況を認識することのできる携帯端末装置を提供する。
【解決手段】運転支援システムに用いられる携帯端末装置1において、後方カメラ3の車室内の画像に基づき予め複数定められた車室内の特徴部を抽出するための特徴部情報と、各特徴部の位置情報と、携帯端末装置1の設置位置と設置角度に関する予め定められた基準位置情報とを、車種毎に記憶する記憶手段4と、記憶された特徴部情報と後方カメラ3の画像情報とに基づいて、各特徴部の位置を導出する導出手段5と、導出された各特徴部の位置と各特徴部の位置情報とを照合する照合手段6と、照合結果から携帯端末装置1の実設置位置および実設置角度を算出する算出手段7と、前方カメラ2による外界認識結果を補正する補正手段8とを備え、補正手段8は、基準位置情報に対する実設置位置および実設置角度のずれ量に応じて前方カメラ2の外界認識結果を補正する。
(もっと読む)
111 - 120 / 7,055
[ Back to top ]