
国際特許分類[H04N7/18]の内容
電気 (1,674,590) | 電気通信技術 (544,871) | 画像通信,例.テレビジョン (280,882) | テレビジョン方式[4,2011.01] (43,981) | 閉回路テレビジョン方式,すなわち信号が放送されない方式 (7,055)
国際特許分類[H04N7/18]に分類される特許
131 - 140 / 7,055
画像処理装置、画像処理方法およびプログラム
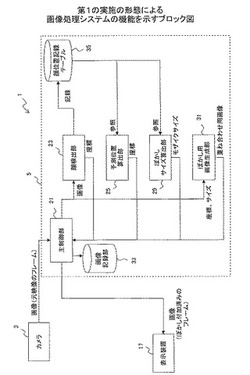
【課題】ぼかしの領域の位置がずれる可能性を低減でき、ぼかしの領域を必要最小限にできる画像処理装置、画像処理方法およびプログラムを提供する。
【解決手段】画像処理装置は、画像取得部と、対象検出部と、記録部と、予測位置情報算出部と、画像処理部を有している。画像取得部は、時系列に複数の画像を取得する。対象検出部は、前記画像取得部が取得した画像から画像処理を施す対象を検出する。記録部は、前記対象検出部が検出した前記対象の位置情報をそれぞれの時刻情報とともに記録する。予測位置算出部は、前記記録部に記録された複数の前記位置情報および前記時刻情報に基づき、前記複数の画像より後に撮影される画像における前記対象の予測位置情報を算出する。画像処理部は、前記後に取得される画像の前記予測位置情報算出部により算出された前記予測位置情報に応じた部分に前記画像処理を施す。
(もっと読む)
画像処理装置、画像処理方法、および、プログラム

【課題】誤検出を抑制した、頑強な不動体検出を行う。
【解決手段】取得される映像から、多項分布の背景モデルを生成し、背景を生成する生成部と、生成部により生成された背景モデルから、信頼度の高い背景が生成できるか否かを判断する判断部を備え、現画像において、生成される背景とは異なる部分の画像である動体が検出され、動体が、所定の一定時間以上停止しているかどうかが判定される。一定時間以上停止している動体である一時停止オブジェクトが映る一時停止画像と、現画像とが用いられて、現画像の画素について、所定の時間以上変化がない、背景とは異なる不動体であることの確からしさを表す不動体信頼度が求められる。求められた不動体信頼度に基づいて、現画像から、不動体が検出される。本技術は、例えば、物体の置き去りや持ち去り等を検出する不動体の検出に適用できる。
(もっと読む)
作業機の周囲監視装置
【課題】作業機の周囲の状況を正確且つ良好な視認性で監視して、作業機の安全性や作業効率を向上させることを目的とする。
【解決手段】上部旋回体5に複数台が設けられ、そのうち2台が相互に視野範囲を部分的に重複するように設けた複数台のカメラと、各カメラで取得したカメラ画像に基づいて上方視点となるように視点変換した仮想視点画像を生成する視点変換部23と、視点変換部23が生成した複数の仮想視点画像をそれぞれに対応した表示領域に表示するように合成した合成画像を生成する画像合成部24と、合成画像を第1の画像として、各カメラのうち何れか1つのカメラが撮影している画像であり仮想視点画像間の境界線を視野内に含む画像を第2の画像として、第1の画像と第2の画像とを含む表示画像を生成する表示画像生成部25と、表示画像を画面上に表示するモニタ14と、を備えている。
(もっと読む)
コーナー検出装置
【課題】 撮像状況によって分離して抽出された2つのエッジ間に存在するコーナーを検出できるコーナー検出装置を提供する。
【解決手段】 車両に搭載し、周囲環境を画像として撮像するカメラ1と、撮像された画像に対し、2方向以上の直線エッジ成分を抽出するエッジ抽出部3と、各エッジを構成する画素に対して、エッジの直交方向の速度であるフローを算出するフロー算出部4と、エッジ端をエッジ方向(エッジの延びる方向)に延長するエッジ延長部5と、延長されたエッジに基づき、方向の異なるエッジ同士の交点をコーナーとして判別するコーナー判別部6と、を備え、エッジ延長部5は、延長した先に同じ大きさを有するフローが存在する場合、延長を有効と見なして再線化する。
(もっと読む)
追跡装置、追跡方法およびプログラム
【課題】対象物が動くことにより画像にぶれが生じた場合でも、安定して対象物を追跡することが可能な追跡装置、追跡方法およびプログラムを提供する。
【解決手段】実施形態の追跡装置は、取得部と第1算出部と第2算出部と設定部とを含む。取得部は、追跡対象物を撮像して、時系列のフレーム単位で画像を取得する。第1算出部は、画像内の探索領域に含まれる各画素について、当該画素の画素値と基準値との一致度を示す第1尤度を算出する。第2算出部は、探索領域内の各画素について、当該画素の画素値と、過去のフレームにおける画像内の当該画素に対応する位置の画素値との差分を示す差分値を算出する。第1設定部は、探索領域内の各画素について、当該画素と、過去における追跡対象物の位置との距離が大きいほど、第1尤度の重みが小さくなるとともに差分値の重みが大きくなるように、第1尤度および差分値の各々の重みを設定する。
(もっと読む)
撮像装置、監視カメラ、およびカメラ画面のマスク方法
【課題】パン回転、チルト回転、ズームによって変形したカメラ画面上のプライバシ保護のためのマスク範囲を正確に算出する。
【解決手段】撮像装置10に備わるマイコン120において、マスク2次元3次元変換部154は、ズーム位置に応じた焦点距離を3次元座標のうちの1つの軸(例えば、Z軸)上に採って、撮像素子104の仕様によって決まる撮像面20(長方形)の2次元位置を3次元座標で表す。そして、マスク表示位置算出部165は、パン・チルト・ズーム後の3次元座標上の撮像面20上のマスク位置をカメラ画面21(長方形)の2次元位置に変換する際に、撮像面20のサイズとカメラ画面21のサイズとが相似であることを利用して、撮像面20およびカメラ画面21の3つの頂点からの距離を用いて、カメラ画面21の2次元上のマスク位置を算出する。
(もっと読む)
撮像方法
【課題】可視光を散乱させる微粒子が分散した気体又は液体の向こう側にある対象物を鮮明に撮像する。
【解決手段】屋内に、撮像対象の対象物Xがある。対象物Xは黒体放射する。対象物Xを遠赤外線を撮像できる赤外線カメラ1にて撮像する。照明光源4の手前にはフィルタ5があり、照明光源4からの照明光は遠赤外線が遮断される。対象物Xと赤外線カメラ1の間には霧状の水滴が存在する。この状態で赤外線カメラ1で撮像を行うと、対象物Xからの遠赤外線のみによって対象物Xが撮像されるので、得られる画像は鮮明である。
(もっと読む)
運転支援装置
【課題】運転者が車両の周辺環境に注意して慎重に運転操作を行う際の利便性がより高い運転支援を行うことができる運転支援装置を提供する。
【解決手段】運転支援装置100は、車両の周辺状況と当該車両の状態とに応じて画像を切り替えて表示する運転支援装置であって、当該車両の周辺に物体が検出された場合、且つ、当該車両がイグニッションオン状態後の最初の前進走行状態でない場合に、当該車両の後方画像を表示する画面表示切換器9及び画面表示器10を備える。これにより、当該車両がイグニッションオン状態後の最初の前進走行状態でなく即ち駐車中から前方へ出発する状態でない場合、且つ、当該車両の周辺に物体が検出された場合、後方画像を表示させるための操作を運転者が行うことなく、後方画像を適切に表示させることが可能になる。
(もっと読む)
遠隔地監視システム
【課題】監視対象領域をカメラ装置により撮像し、撮像した画像データをデータセンターに蓄積することで通信ネットワークを介して遠隔地から閲覧可能にした遠隔地監視システムにおいて、監視の動作に影響を与えることなく省電力を図ることが可能なシステムを提供する。
【解決手段】遠隔地にある監視対象領域に自然エネルギー発電手段11を電源とするローカル監視装置1を設置し、このローカル監視装置1に備える撮像手段13と、撮像手段13により撮像した画像データを外部へ送出する通信手段18とに対する電力供給を間欠的に行い、撮像手段と通信手段とを一定時間毎に所定時間だけ作動させて電力供給が行われている間に監視動作を行う。また、画像データを蓄積するデータセンター4に監視対象領域に関するリアルタイム映像の閲覧要求を受け付ける機能を備え、必要に応じてローカル監視装置を連続動作させて監視対象領域の現在状況を確認可能にする。
(もっと読む)
画像表示システム、画像表示装置、画像表示方法、及び画像表示プログラム
【課題】運転時の安全性を向上できる画像表示システム、画像表示装置、画像表示方法又は画像表示プログラムを提供する。
【解決手段】撮影装置は画像を撮影し、距離情報取得部は前記撮影装置から各々入力された画像信号が表す被写体までの距離情報を取得し、位置特定部は車両の運転状況を表す運転状況情報に基づいて車両の予想位置を表す位置情報を特定し、画像出力部は前記画像信号が表す被写体のうち、前記位置特定部が特定した位置にある被写体を表す画像を選択する。
(もっと読む)
131 - 140 / 7,055
[ Back to top ]