
国際特許分類[H04N7/18]の内容
電気 (1,674,590) | 電気通信技術 (544,871) | 画像通信,例.テレビジョン (280,882) | テレビジョン方式[4,2011.01] (43,981) | 閉回路テレビジョン方式,すなわち信号が放送されない方式 (7,055)
国際特許分類[H04N7/18]に分類される特許
161 - 170 / 7,055
監視カメラ映像表示装置
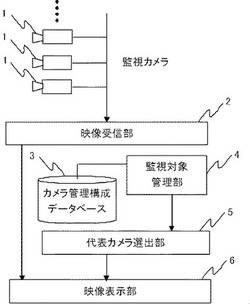
【課題】 ある監視領域内の多数のカメラ映像の中から、適切な代表映像を選択的に表示することにより、ユーザの設定作業を不要にし、監視の効率を向上させる。
【解決手段】 複数の監視カメラの物理的な配置に基づいて前記監視カメラ同士の論理的な構成を示すカメラ管理構成を格納するカメラ管理構成データベースと、前記カメラ管理構成データベースに格納された前記カメラ管理構成に基づいて、前記監視カメラに評価値を与え、この評価値に従って、複数の監視カメラの中から表示対象とする監視カメラを代表カメラとして選出する代表カメラ選出部とを備える。
(もっと読む)
監視装置、監視方法およびプログラム

【課題】画面表示された移動体の経路上の指定した場所から映像を再生する。
【解決手段】監視装置10は、移動体の動きを検出する動き検出部22と、検出した動きの特徴に基づいて検出ポイントを設定するとともに、その検出ポイントにおける移動体の位置と録画時刻とを含む経路情報を生成する経路生成部23とを備え、経路情報を参照して、検出ポイント間を結ぶ線を移動体の経路として表示装置130の画面上に表示する。さらに、監視装置10は、前記経路上の位置を指定する入力を受け付けて、指定された位置と検出ポイントとの位置関係に基づいて録画時刻を算出する時刻算出部25を備え、指定した位置に対応する録画時刻から映像を再生する。
(もっと読む)
運転支援装置
【課題】車両の所定位置に固定された撮像手段により車両周囲を撮像した画像を使用して、運転者にとってより使用感の良い運転支援画像を表示する運転支援装置を提供する。
【解決手段】画像処理手段は、車両40の後部に設置された撮像手段1で撮像した車両後方周囲画像から車両40後方に対応する領域を切り出しこれから後方画像を生成するとともに、車両40後方の左右範囲に対応する領域とを各々切り出しこれらから右後方周囲画像と左後方周囲画像とを生成する。そして、後方画像を表示手段の下部に表示するとともに、右後方周囲画像と左後方周囲画像とを表示手段の上部に並べて表示する。その際、右後方周囲画像は表示手段の中央部から右側部へ向かうに従って表示領域が上下に広く表示されるよう生成されるとともに、左後方周囲画像は表示手段の中央部から左側部へ向かうに従って表示領域が上下に広く表示されるよう生成される。
(もっと読む)
車内非常通報装置
【課題】新規に敷設する必要がなく、低コストで、かつ配線するスペースを必要とせず、映像伝送に必要な伝送周波数帯域の映像信号を十分伝送可能で、音声以外の通信者側の情報を入手可能とし、非常通報に対しより詳細に対応することが可能な車内非常通報装置を提供する。
【解決手段】非常通報ボタンの近傍に、非常通報ボタンを押す人(乗客若しくは乗務員)の顔が映るようカメラを設置する。カメラが撮像した映像は、PLC装置を介して列車の低圧電力線に送信される。乗務員側では、通報者の映像を映し出すための表示モニタを設置し低圧電力線より非常通報ボタンに連動して映像出力オンし、ボタンが押された場所に設置されているネットワーク映像を表示モニタに選択出力するように動作する。
(もっと読む)
信号機認識装置、候補点パターン送信装置、候補点パターン受信装置、信号機認識方法、及び候補点パターン受信方法
【課題】前方画像中における信号機の認識を高い精度と処理速度で実現する。
【解決手段】前方画像中で赤色点で認識される複数の信号候補点P1〜P5を検出し、そのうち赤色点の消灯とともに近傍位置での青色点の点灯が認識される信号確定点P2を検出し、これら信号確定点P2と複数の信号候補点P1,P3〜P5間の幾何的な配置関係を解析した候補点パターンデータを生成、記憶する。同じ交差点に対する同じ進入方向に対応してあらかじめ生成、記憶しておいた候補点パターンデータと、その時点で検出した信号候補点P1〜P5の集合に対して候補点パターンの配置と大きさを照合して当てはめることで、候補点パターンデータ中に設定された信号確定点P2に対応する信号候補点を、実際の信号機の表示位置を示す信号点として認識できる。
(もっと読む)
インターホン装置
【課題】 ネットワーク上で伝送される映像信号の数が増加した場合でも、引き続き映像信号を停滞なく伝送でき、且つ伝送中の映像信号のフレームレートは途中で変化することがない。
【解決手段】 子機1にカメラ12の撮像映像信号から所定のフレームレートの映像信号を生成するデジタル映像信号生成部15と、伝送リンク確立時における映像信号伝送のフレームレートを決定するフレームレート設定部19と、伝送リンク数とフレームレートとを反比例するよう関連付けたフレームレート設定情報を記憶するフレームレート設定記憶部16とを設け、フレームレート設定部19はLAN上の映像信号の伝送リンク数をカウントし、カウントした伝送リンク数に応じたフレームレートをフレームレート設定記憶部16から読み取り、これから生成する映像信号のフレームレートを決定する。
(もっと読む)
車両運転支援装置、車両が走行する道路の路肩を検出する方法および該方法に基づく車両運転支援方法
【課題】本発明は、楕円偏光が優勢な実際の道路環境においても正確に路肩を検出することができる新規な車両運転支援装置を提供することを目的とする。
【解決手段】車両の車軸方向(または車両の高さ方向)に2つの偏光カメラを配置して偏光画像撮像系を構築した上で、車軸方向の偏光成分の光強度(H)および当該車両の高さ方向の偏光成分の光強度(V)から算出される偏光状態特徴量を、画像において対をなす画素毎に比較し、その差分が所定の閾値を超える場合に、これを路肩として検出する。検出された路肩の位置情報に基づいて、操舵制御手段、走行速度制御手段および警告手段等を制御することによって車両の運転支援を行う。
(もっと読む)
物体検出方法
【課題】監視領域に人、車の両方が入ってくる環境において、監視領域に車が存在することを、差分、二値化、ノイズ除去、ラベリング、大きさ判定処理で行った場合には、二値化のしきい値は環境変化に応じて高くなったり、低くなったりするため、二値化しきい値によっては、1つの物体が複数に分かれて検出されることにより、個々のサイズが小さくなり、車が存在することを認識することができなかった。
【解決手段】正規化相関を使用することで物体の存在領域の認識精度を向上する。この結果、監視領域に車が存在するときには誤検知防止のために処理を停止し、車が存在しないときに侵入者の検知を行う場合、正規化相関処理、差分処理を組合せることにより、車が存在することを認識する性能を向上した。
(もっと読む)
動体追跡装置
【課題】複数動体が交差しても、効率的かつ正確に動体追跡する。
【解決手段】時系列の連続原画像P(i)からなる動画を画像入力部110で入力し、動体識別画像生成部130により、背景画像との差分をとり、背景と前景を区別する動体識別画像M(i)を生成する。トラッカー格納部150は、個々の動体の輪郭に外接するブロッブ包摂図形を、時系列で格納する。マスキング処理部140は、トラッカー格納部150内の時刻t(i−1)の着目動体Tj以外の動体のブロッブ包摂図形を利用して、動体識別画像M(i)の前景領域をマスキングする。ブロッブ包摂図形抽出部170は、マスキング部分を除く前景領域の輪郭を候補ブロッブ包摂図形として抽出する。トラッカー登録部160は、着目動体Tjの先行ブロッブ包摂図形Bj(i−1)に対する後続ブロッブ包摂図形Bj(i)を候補ブロッブ包摂図形の中から選択し、トラッカー格納部150に登録する。
(もっと読む)
画像処理装置、画像処理システム、カメラ、カメラシステム
【課題】表示画面内の対象物の存在を認識しやすい画像を提供し、危険予知を容易にすることができる画像処理装置、画像処理システム、カメラ、カメラシステム等を提供すること。
【解決手段】画像処理装置100は、赤外線画像データを取得する画像取得部110と、画像取得部110により取得された赤外線画像データに基づく画像領域に対して、画像領域内での対象物を検出する画像処理を行うアラート表示領域と、画像領域内での対象物を検出する画像処理を行わないアラート非表示領域とを設定する領域設定部120と、アラート表示領域の赤外線画像データに基づいて、アラート表示領域における対象物の検出情報を含むアラート表示の画像処理を行ってアラート表示を含む表示用画像データを生成する処理部130とを含む。領域設定部120は、境界線を用いて画像領域を区画する設定パターンを決定し、境界線の位置及び形状のうちの少なくとも一つを定める。
(もっと読む)
161 - 170 / 7,055
[ Back to top ]