
バッテリの状態予測システム、方法及びプログラム
【課題】 比較的容易に測定可能なバッテリの計測値を使って、所定の統計的モデルに基づき、統計的計算により、バッテリの内部状態を直接測定した値を近似する値を得て、これに従い、バッテリの容量維持率を予測する技法を提供すること。
【解決手段】 バッテリの内部状態を表す基礎データ(正負極交流インピーダンス曲線プロットから抽出した特徴量など)を基に容量維持率を算出する観測モデルと、1ステップ前の内部状態、劣化環境(SOCすなわち実際に使うことができる電池容量、温度など)を現在の内部状態へ写像する遷移モデルとが予め用意される。そして、これらのモデルを用いて、尤度が最大、すなわち、これらのモデルから計算された予測値と実際の値との差異の自乗和が最小となる内部状態の遷移パスを、好適には動的計画法である最適化手法により求め、容量維持率を予測する。
【解決手段】 バッテリの内部状態を表す基礎データ(正負極交流インピーダンス曲線プロットから抽出した特徴量など)を基に容量維持率を算出する観測モデルと、1ステップ前の内部状態、劣化環境(SOCすなわち実際に使うことができる電池容量、温度など)を現在の内部状態へ写像する遷移モデルとが予め用意される。そして、これらのモデルを用いて、尤度が最大、すなわち、これらのモデルから計算された予測値と実際の値との差異の自乗和が最小となる内部状態の遷移パスを、好適には動的計画法である最適化手法により求め、容量維持率を予測する。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、様々な電子機器・電動機器などに利用される二次電池の状態を推定するためのシステム、方法及びプログラムに関するものである。
【背景技術】
【0002】
近年、地球温暖化や石油資源枯渇の懸念から、低炭素社会への移行が望まれている。その活動の一環として、電力グリッドにおける二次電池を用いた電力取引、工場内での二次電池を用いたピークシフト、石油エネルギーを用いる内燃機関から電力エネルギーを用いる電気モーターへの動力システムの変化など、各産業エリアにおいて二次電池の重要性が増しつつある。
【0003】
しかし、二次電池は、充放電を繰り返すと、次第に充電率が低下していく、という問題がある。二次電池の性能低下は、二次電池を駆動源として使用する自動車において、航続距離の低下やその他の走行機能につながり、安全上の問題になる。このため、従来技術において、二次電池の状態を推定するさまざまな技術が提案されている。
【0004】
特開平9−215207号公報は、放電/充電サイクルを有するバッテリを監視するシステムにおいて、ニューラルネットワークを用いて、予め設定されたバッテリ放電電圧のしきい値に到達する瞬時に関する予測情報を提供する技術を開示する。
【0005】
特開平11−32442号公報は、モータなどの負荷と蓄電池の充放電電圧と電流をデジタル処理可能とするために、電圧と電流をA/D変換器5とA/D変換器6でデジタル信号に変換し、さらに、電圧の周波数変換器と電流の周波数変換器で電流と電圧を複素スペクトルに変換し、求めた蓄電池使用時の電圧Vと電流Iの複素スペクトルから、インピーダンスをインピーダンス計算部で計算し、動作中の蓄電池からインピーダンスの特徴量である半径rjを求め、この半径rjと、予め求めて電池残容量計算部に記憶しておいた半径riとを比較し、相互の関係から蓄電池残容量を推定する技術を開示する。
【0006】
特開2002−319438号公報は、バッテリーパックを組み込んだ車両のハイブリッド伝導機構等を首尾良く作動させるために、バッテリー充電状態を正確且つ再現性良く推定するために、バッテリーの状態を記述する状態ベクトルを生成し、状態ベクトルの応答を予測し、バッテリーの応答を測定し、バッテリーの状態を決定するため、予測された応答及び測定された応答の間の差異に基づいて状態ベクトルを修正する技術を開示する。
【0007】
特開2011−38857号公報は、バッテリの完全な充放電を行うことなく短時間で精度よく容量維持率の判定を行うことが可能な容量維持率判定装置に関し、容量維持率判定装置が、インピーダンス測定部および容量推定部を含み、信号発生部からバッテリに交流信号が与えられ、交流信号に対するバッテリからの応答信号に基づいてインピーダンス測定部により交流インピーダンスの周波数特性が算出される。算出された周波数特性から特徴周波数が決定される。容量推定部はメモリおよび判定部を備える。メモリにはバッテリの温度と特徴周波数と容量維持率との関係が記憶されている。判定部は、温度検出部により検出されるバッテリの温度、決定された特徴周波数、メモリに記憶された関係に基づいてバッテリ10の容量維持率を判定する技術を開示する。
【0008】
上記従来技術は、動作中のバッテリのインピーダンスの特徴量、バッテリからの応答信号に基づいて測定された交流インピーダンスの周波数特性、バッテリの温度などに基づいてバッテリの性能を推定する技術は開示するが、電池内部状態を考慮したバッテリの性能推定技術でなく、バッテリの利用履歴も考慮したものでないため、バッテリの劣化予測としては、正確性に欠けるという問題があった。
【0009】
電池内部状態として知られている状態量に、交流インピーダンス曲線プロットがある。これは、元の抵抗値と容量値と周波数を含む、インピーダンスの2つの成分を表す値をプロットしたもので、様々な周波数でインピーダンスの抵抗的成分と容量的成分を測定し、それぞれを横軸、縦軸にとってプロットすると半円になり、この円の直径が元の抵抗になる。このような計測値を用いれば、より正確にバッテリの劣化予測を行うことができるが、交流インピーダンス曲線プロットを測定するための測定器が、数百万円から数千万円と、極めて高価である、という問題がある。すると、二次電池運用時に手軽に電池内部状態を測定することは困難であり、電池内部状態は、メンテナンス時、あるいは電池再利用時のような極めて限られたタイミングでしか測定できず、結局、バッテリの劣化予測には使えなかった。
【先行技術文献】
【特許文献】
【0010】
【特許文献1】特開平9−215207号公報
【特許文献2】特開平11−32442号公報
【特許文献3】特開2002−319438号公報
【特許文献4】特開2011−38857号公報
【発明の概要】
【発明が解決しようとする課題】
【0011】
この発明は、比較的容易に測定可能なバッテリ(電池)の計測値を使って、所定の統計的モデルに基づき、統計的計算により、バッテリの容量維持率を予測する技法を提供することにある。
【課題を解決するための手段】
【0012】
この発明は、上記課題を解決するためになされたものであり、この発明に従うシステムは、バッテリの内部状態を表す基礎データ(正負極交流インピーダンス曲線プロットから抽出した特徴量など)を基に容量維持率を算出する観測モデルと、1ステップ前の内部状態、劣化環境(SOCすなわち実際に使うことができる電池容量、温度など)を現在の内部状態へ写像する遷移モデルとが予め用意される。そして、これらのモデルを用いて、尤度が最大、すなわち、これらのモデルから計算された予測値と実際の値との差異の自乗和が最小となる内部状態の遷移パスを、好適には動的計画法である最適化手法により求め、容量維持率を予測する。
【0013】
このとき、観測モデル及び遷移モデルで用いられるデータは、容量維持率(1次元)、内部状態(正負極で2次元)、劣化環境(SOC、温度など多次元)の時系列データである。そして、この発明に従うシステムは、カーネル回帰等の非線形回帰を用いて、観測モデル(内部因子→容量維持率の回帰モデル)及びノイズの分散と、遷移モデル(時刻tの内部因子→時刻t+1の内部因子)及びノイズの分散を学習する。
【0014】
次に、この発明に従うシステムは、上記学習データを用いて、テストデータの初期値から現在までの正負極の劣化経路を推定し、未来の容量維持率を予測する。
【0015】
この発明に従うシステムは、好適には、二次電池を駆動源として使用するハイブリッド電気自動車(HEV)や、電気自動車(EV)における車載電子制御システムの一部として実装される。
【発明の効果】
【0016】
この発明によれば、交流インピーダンス曲線プロットが計測できないような環境(例えば、車載システムの環境)でも、交流インピーダンス曲線プロットを計測したのに近い精度で、バッテリの容量維持率を予測することが可能となり、電子機器・電動機器などにおいてバッテリの性能劣化を的確に知ることができるという効果が得られる。
【図面の簡単な説明】
【0017】
【図1】バッテリ用ECUと、バッテリを含む構成を示すブロック図である。
【図2】本発明を実施するための機能論理ブロック図である。
【図3】本発明に従い、バッテリの内部状態を推定するための処理のフローチャートを示す図である。
【図4】内部状態の値に基づき、バッテリの容量維持率を予測する処理のフローチャートを示す図である。
【発明を実施するための形態】
【0018】
以下、図面を参照して、本発明の実施例を説明する。特に断わらない限り、同一の参照番号は、図面を通して、同一の対象を指すものとする。また、以下で説明するのは、本発明の一実施形態であり、この発明を、この実施例で説明する内容に限定する意図はないことに留意されたい。
【0019】
図1は、本発明を実施するためのハードウェア構成のブロック図である。本発明は、これには限定されないが、この実施例は、車載システムの一部として本発明を実装するものである。特に図1は、車載システムにおいて、本発明に関連がある箇所のみを図示していることに留意されたい。
【0020】
図1に示されているのは、バッテリ用ECU110と、バッテリ130と、CAN(control area network)などの車載ネットワーク150である。
【0021】
バッテリ用ECU110は、CPUをもつ演算部112と、RAM、ROM及びフラッシュ・メモリなどの不揮発性メモリをもつメモリ114と、車載ネットワーク150との間でデータフレームなどの情報をやりとりする通信部116と、バッテリ130の状態をセンシングするセンサ機能部118を有する。
【0022】
バッテリ130は、好適には、電気自動車やハイブリッドカーに使用可能な充電池である。
【0023】
センサ機能部118は、バッテリ130の電圧、電流、温度、絶縁抵抗などをそれぞれ測定するための素子をもつ。演算部112は、センサ機能部118の測定データに基づき、SOC(充電状態)などを計算して求める機能をもつ。SOCを求める計算は、特開2001−330654号公報、特表2003−508881号公報、あるいは特開2005−19019号公報等に記載の方法を用いることができる。
【0024】
メモリ114は、ECU110全体の動作を制御する、オペレーティング・システムに相当するプログラムを含む。
【0025】
メモリ114にはさらに、本発明に従い、観測モデルのためのデータ、遷移モデルのためのデータ、及び観測モデル及び遷移モデルに基づき、センサ機能部118の測定データに従い、バッテリの容量維持率を予測する機能を実行するためのモジュールが含まれている。
【0026】
バッテリの容量維持率を予測する機能については、後でより詳細に説明する。
【0027】
次に、図2のブロック図を参照して、本発明の処理機能について説明する。図2において、バッテリ計測ブロック202は、センサ機能部118の機能をあらわすブロックであり、バッテリ130の電圧、電流、温度、絶縁抵抗などの測定値を与える。
【0028】
観測モデル204は、内部状態のベクトルziと、それに対応する容量維持率yiを事前に劣化試験により計測した結果を、{yi},{zi} i=1,2,...,Nとして、N個ずつ保存する。このように保存された{yi},{zi} i=1,2,...,Nを用いて、与えられたパラメータzに対して、容量維持率yを計算するための下記の式の定義も観測モデル204に含まれている。但し、この式を用いて容量維持率yを計算するのは、予測ブロック208の役割である。パラメータzは、好適には2次元であり、交流インピーダンス曲線から一部の値を取ってきた値を加工した特徴量が2つで2次元とすることができる。例えば、特徴点1=周波数2000Hzの虚軸ー周波数100Hzの虚軸、特徴点2=周波数1600Hzの実軸ー周波数100Hzの実軸などである。
【数1】

ここで、σkは、{zi}が正規分布に従うと想定した場合の分散である。
【0029】
尚、上記観測モデル204をあらわす式は、これには限定されず、内部状態Zから容量維持率yへの回帰であれば、任意の式を用いることができる。例えば、下記のような式も使うことができる。
【数2】
ここでGは、zのN個の最近傍の集合である。
【0030】
なお、ここでの回帰モデルは、動的計画法との適合性から、非線形回帰モデルを使うことが望ましい。
【0031】
遷移モデル206は、劣化環境が与えられると一定方向に移動するようにするためのモデルであって、ae(s,T)、ac(s,T)、he(s,T)、hc(s,T)の4つのデータをもつ。
ae(s,T)は、各劣化環境(SOC s,温度T)で放置したときの単位時間あたりの内部状態zの移動速度であり、予めバッテリを使った測定により求められる。例えば、縦軸が、0%〜100%を10ずつ10等分したSOCの目盛りであり、横軸が、マイナス30℃未満から始まって、マイナス30℃〜マイナス25℃、マイナス25℃〜マイナス20℃、・・・0℃〜5℃、5℃〜10℃、・・・10℃〜15℃、・・・55℃〜60℃、60℃以上の、5ずつの刻みにした升目毎のデータをテーブル形式でもっている。
【0032】
ac(s,T)は、各劣化環境(SOC s,温度T)で通電したときの単位通電量あたりの内部状態zの移動速度であり、予めバッテリを使った測定により求められる。例えば、縦軸が、0%〜100%を10ずつ10等分したSOCの目盛りであり、横軸が、マイナス30℃未満から始まって、マイナス30℃〜マイナス25℃、マイナス25℃〜マイナス20℃、・・・0℃〜5℃、5℃〜10℃、・・・10℃〜15℃、・・・55℃〜60℃、60℃以上の、5ずつの刻みにした升目毎のデータをテーブル形式でもっている。
【0033】
he(s,T)は、一定期間で劣化環境(SOC s,温度T)の状態に滞在した時間のヒストグラムである。予めバッテリを使った測定により求められる。
【0034】
hc(s,T)は、一定期間で劣化環境(SOC s,温度T)の状態で通電した通電量のヒストグラムである。予めバッテリを使った測定により求められる。
【0035】
遷移モデル206は、下記の式の定義も含む。予測ブロック208は、下記の式により、ある時間tでの内部状態ztから、次の時間t+1での内部状態zt+1を計算する。
【数3】
【0036】
予測ブロック208はさらに、将来のバッテリの容量維持率を予測するために、ブロック210から、将来の劣化環境の時系列wt+1,wt+2,wt+3,..を読み込む。将来の劣化環境の時系列のブロック210のデータは、将来の運転計画や運転習慣などから、予め決定される。例えば、通勤に自動車を使うなら、月曜日から金曜日までの通勤距離や、土日の使用プランなどに基づき、将来の劣化環境の時系列を決定することができる。
【0037】
次に、予測ブロック208の処理をより詳細に説明する。予測ブロック208の処理は、過去の劣化環境{wt}、容量維持率{yt}の時系列データから、時刻tの内部状態ztを求める。
【0038】
ここで、wt = {he,t, hc,t}
he,tは、数2の式でのhe(s,T)の時刻tでの値、hc,tは、数2の式でのhc(s,T)の時刻tでの値である。
【0039】
そこで、時刻tからt+1で、内部状態がztからzt+1に遷移するコストを次のように定義する。
【数4】
ここで、σobsは、観測モデルのノイズの分散、σtraは、遷移モデルのノイズの分散である。
【0040】
さらに、本発明に従い、次のような処理が行われる。
− 各時刻tの内部状態{zt}をN個に離散化し、各時刻毎にコストを格納するテーブルを作成する。このテーブルを、Zt,0,Zt,1,...,Zt,N-1とする。
− 時刻0の離散化された内部状態Z0,pを初期化する。内部状態の初期値z0 = 0なので、そこだけ0、それ以外は、∞、すなわち現実にはありえない大きい数をセットする。
− 次に、時刻を0にセットする。
・時刻t+1のp番目の内部状態Zt+1,pに着目する。
- 時刻tのq番目の内部状態Zt,qに着目し、この2つの状態間を遷移するコストC(Zt,q,Zt+1,p)を計算する。
- すべてのqについてC(Zt,q,Zt+1,p)を計算し、C(Zt,q,Zt+1,p)+Zt,qが最小になるcminを求める。
- cminをZt+1,pに格納する。
・上記処理をすべてのpに対して行う。
− tをインクリメントし、上記の処理を繰り返す。時刻tが現在時刻になったら終了。
− 時刻tのコストZt,0,Zt,1,...,Zt,Nの中で、最小になるNを探し、現在の内部状態utとして採用する。
【0041】
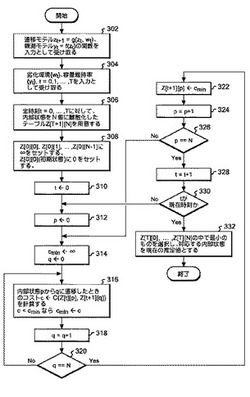
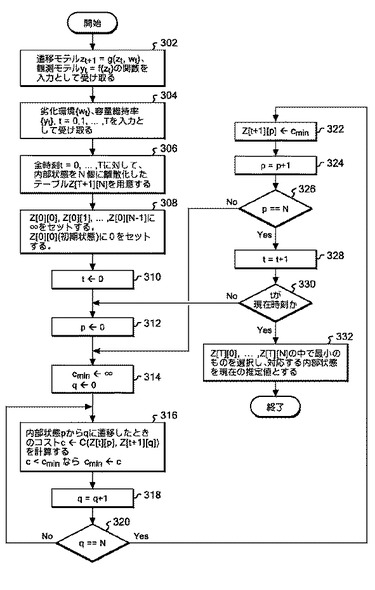
次に、図3のフローチャートを参照して、以上の処理を改めて説明する。図3において、ステップ302で、予測ブロック208は、遷移モデルzt+1 = g(zt,wt)の関数と、観測モデルyt = f(zt)の関数を入力として受け取る。
【0042】
次のステップ304では、予測ブロック208は、劣化環境{wt}、容量維持率{yt} t = 0,1,...,Tを入力として受け取る。これらは、バッテリ計測ブロック202からの測定結果に対して、必要に応じて予測ブロック208で演算処理を行うことで求めてもよい。
【0043】
次のステップ306では、予測ブロック208は、全時刻T=0,1,...,Tに対して、内部状態をN個に離散化したテーブルZ[T+1][N]を用意する。このテーブルは、好適には、メモリ部114のRAM領域に確保される。
【0044】
次のステップ308では、予測ブロック208は、Z[0][0],Z[0][1],...,Z[0][N-1]に∞をセットする。そして、Z[0][0](初期状態)に0をセットする。
【0045】
次のステップ310では、予測ブロック208は、時刻変数tに0をセットする。
【0046】
次のステップ312では、予測ブロック208は、変数pに0をセットする。
【0047】
次のステップ314では、予測ブロック208は、変数cminに∞をセットし、変数qに0をセットする。
【0048】
次のステップ316では、予測ブロック208は、内部状態pからqに遷移したときのコストC(Z[t][p],Z[t+1])を計算し、それをcにセットする。そして、c < cminなら、cmin = cとする。このコストの計算のとき、ステップ302で入力した関数が使用される。
【0049】
予測ブロック208は、ステップ318でqを1だけ増分し、ステップ320では、qがNに等しいかどうかを判断する。qがまだNに達していないなら、処理はステップ316に戻る。
【0050】
一方、もしqがNに等しいと判断されたなら、処理はステップ322に進み、そこで予測ブロック208は、Z[t+1][p]にcminをセットして、ステップ324でpを1つ増分し、ステップ326で、pがNに等しいかどうかを判断する。pがまだNに達していないなら、処理はステップ314に戻る。
【0051】
予測ブロック208は、pがNに達したと判断すると、ステップ328でtを1だけ増分し、ステップ330で、時刻tが現在時刻かどうか判断する。そうでなければ処理は、ステップ312に戻る。
【0052】
ステップ330で、tが現在時刻に達したと判断すると、予測ブロック208は、ステップ332で、Z[T][0],Z[T][1],...,Z[T][N]のうちの最小のものを選択し、対応する内部状態を現在の推定値とする。
【0053】
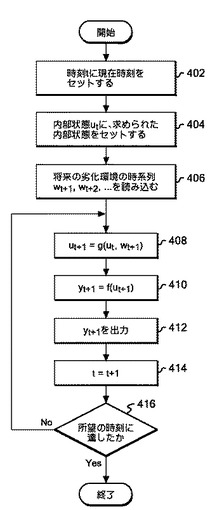
次に、このようにして求まった内部状態utから、将来の容量維持率の時系列yt+1, yt+2, ...を予測する方法を、図4のフローチャートを参照して説明する。
【0054】
予測ブロック208は、ステップ402で、時刻tに現在時刻をセットする。
【0055】
予測ブロック208は次に、ステップ404で、図3のフローチャートで示す処理で求められた内部状態を、内部状態utとしてセットする。
【0056】
予測ブロック208は次に、ステップ406で、将来の劣化環境の時系列時系列wt+1,wt+2,wt+3,..をブロック210から、読み込む。好適には、将来の劣化環境の時系列時系列は、当該の自動車の将来の運転プランから決定される。もし将来の運転プランが、過去とあまり変化しないことが期待されるなら、過去の劣化環境の時系列時系列を、そのまま将来に使うこともできる。
【0057】
予測ブロック208は次に、ステップ408で、ut+1 = g(ut,wt+1)により、次の時刻の内部状態ut+1を計算する。
【0058】
予測ブロック208は次に、ステップ410で、ステップ408で計算されたut+1を用いて、yt+1 = f(ut+1)によりyt+1を計算する。
【0059】
予測ブロック208は次に、ステップ412で、計算の結果得られたyt+1を、例えば、メモリ部114のフラッシュ・メモリに書き込むなどの方法により、出力する。
【0060】
予測ブロック208は次に、ステップ414で、時刻tを1だけ進めて、ステップ416で所望の時刻まで進んだかどうか判断する。そうでないならステップ408に戻り、一方、ステップ416で所望の時刻まで進んだ場合、そこで処理が終わる。
【0061】
本発明の予測技法が特に効果を奏するのは、容量維持率が同じで、正負極の劣化バランスが異なるような場合である。正負極の劣化バランスのずれは、実際の容量維持率の劣化速度に大きく効いてくるが、従来の、容量維持率の変化で容量維持率の劣化速度を予測する技法では、正負極の劣化バランスのずれを考慮できないので、予測の精度が低くなってしまう。
【0062】
本発明の予測技法は、正負極の劣化バランスのずれもきちんと考慮に入れて計算するので、より正確に容量維持率の劣化速度を予測することが可能となる。
【0063】
以上、車載システムの実施例に従い、本発明を説明してきたが、本発明が、充電器を用いる任意の製品の充電器の容量維持率の劣化速度予測に適用可能であることを、この分野の当業者なら理解するであろう。
【符号の説明】
【0064】
110 バッテリ用ECU
112 演算部
114 メモリ部
116 通信部
118 センサ機能部
130 バッテリ
202 バッテリ計測ブロック
204 観測モデル・ブロック
206 遷移モデル・ブロック
208 予測モデル・ブロック
210 将来の劣化環境の時系列ブロック
【技術分野】
【0001】
この発明は、様々な電子機器・電動機器などに利用される二次電池の状態を推定するためのシステム、方法及びプログラムに関するものである。
【背景技術】
【0002】
近年、地球温暖化や石油資源枯渇の懸念から、低炭素社会への移行が望まれている。その活動の一環として、電力グリッドにおける二次電池を用いた電力取引、工場内での二次電池を用いたピークシフト、石油エネルギーを用いる内燃機関から電力エネルギーを用いる電気モーターへの動力システムの変化など、各産業エリアにおいて二次電池の重要性が増しつつある。
【0003】
しかし、二次電池は、充放電を繰り返すと、次第に充電率が低下していく、という問題がある。二次電池の性能低下は、二次電池を駆動源として使用する自動車において、航続距離の低下やその他の走行機能につながり、安全上の問題になる。このため、従来技術において、二次電池の状態を推定するさまざまな技術が提案されている。
【0004】
特開平9−215207号公報は、放電/充電サイクルを有するバッテリを監視するシステムにおいて、ニューラルネットワークを用いて、予め設定されたバッテリ放電電圧のしきい値に到達する瞬時に関する予測情報を提供する技術を開示する。
【0005】
特開平11−32442号公報は、モータなどの負荷と蓄電池の充放電電圧と電流をデジタル処理可能とするために、電圧と電流をA/D変換器5とA/D変換器6でデジタル信号に変換し、さらに、電圧の周波数変換器と電流の周波数変換器で電流と電圧を複素スペクトルに変換し、求めた蓄電池使用時の電圧Vと電流Iの複素スペクトルから、インピーダンスをインピーダンス計算部で計算し、動作中の蓄電池からインピーダンスの特徴量である半径rjを求め、この半径rjと、予め求めて電池残容量計算部に記憶しておいた半径riとを比較し、相互の関係から蓄電池残容量を推定する技術を開示する。
【0006】
特開2002−319438号公報は、バッテリーパックを組み込んだ車両のハイブリッド伝導機構等を首尾良く作動させるために、バッテリー充電状態を正確且つ再現性良く推定するために、バッテリーの状態を記述する状態ベクトルを生成し、状態ベクトルの応答を予測し、バッテリーの応答を測定し、バッテリーの状態を決定するため、予測された応答及び測定された応答の間の差異に基づいて状態ベクトルを修正する技術を開示する。
【0007】
特開2011−38857号公報は、バッテリの完全な充放電を行うことなく短時間で精度よく容量維持率の判定を行うことが可能な容量維持率判定装置に関し、容量維持率判定装置が、インピーダンス測定部および容量推定部を含み、信号発生部からバッテリに交流信号が与えられ、交流信号に対するバッテリからの応答信号に基づいてインピーダンス測定部により交流インピーダンスの周波数特性が算出される。算出された周波数特性から特徴周波数が決定される。容量推定部はメモリおよび判定部を備える。メモリにはバッテリの温度と特徴周波数と容量維持率との関係が記憶されている。判定部は、温度検出部により検出されるバッテリの温度、決定された特徴周波数、メモリに記憶された関係に基づいてバッテリ10の容量維持率を判定する技術を開示する。
【0008】
上記従来技術は、動作中のバッテリのインピーダンスの特徴量、バッテリからの応答信号に基づいて測定された交流インピーダンスの周波数特性、バッテリの温度などに基づいてバッテリの性能を推定する技術は開示するが、電池内部状態を考慮したバッテリの性能推定技術でなく、バッテリの利用履歴も考慮したものでないため、バッテリの劣化予測としては、正確性に欠けるという問題があった。
【0009】
電池内部状態として知られている状態量に、交流インピーダンス曲線プロットがある。これは、元の抵抗値と容量値と周波数を含む、インピーダンスの2つの成分を表す値をプロットしたもので、様々な周波数でインピーダンスの抵抗的成分と容量的成分を測定し、それぞれを横軸、縦軸にとってプロットすると半円になり、この円の直径が元の抵抗になる。このような計測値を用いれば、より正確にバッテリの劣化予測を行うことができるが、交流インピーダンス曲線プロットを測定するための測定器が、数百万円から数千万円と、極めて高価である、という問題がある。すると、二次電池運用時に手軽に電池内部状態を測定することは困難であり、電池内部状態は、メンテナンス時、あるいは電池再利用時のような極めて限られたタイミングでしか測定できず、結局、バッテリの劣化予測には使えなかった。
【先行技術文献】
【特許文献】
【0010】
【特許文献1】特開平9−215207号公報
【特許文献2】特開平11−32442号公報
【特許文献3】特開2002−319438号公報
【特許文献4】特開2011−38857号公報
【発明の概要】
【発明が解決しようとする課題】
【0011】
この発明は、比較的容易に測定可能なバッテリ(電池)の計測値を使って、所定の統計的モデルに基づき、統計的計算により、バッテリの容量維持率を予測する技法を提供することにある。
【課題を解決するための手段】
【0012】
この発明は、上記課題を解決するためになされたものであり、この発明に従うシステムは、バッテリの内部状態を表す基礎データ(正負極交流インピーダンス曲線プロットから抽出した特徴量など)を基に容量維持率を算出する観測モデルと、1ステップ前の内部状態、劣化環境(SOCすなわち実際に使うことができる電池容量、温度など)を現在の内部状態へ写像する遷移モデルとが予め用意される。そして、これらのモデルを用いて、尤度が最大、すなわち、これらのモデルから計算された予測値と実際の値との差異の自乗和が最小となる内部状態の遷移パスを、好適には動的計画法である最適化手法により求め、容量維持率を予測する。
【0013】
このとき、観測モデル及び遷移モデルで用いられるデータは、容量維持率(1次元)、内部状態(正負極で2次元)、劣化環境(SOC、温度など多次元)の時系列データである。そして、この発明に従うシステムは、カーネル回帰等の非線形回帰を用いて、観測モデル(内部因子→容量維持率の回帰モデル)及びノイズの分散と、遷移モデル(時刻tの内部因子→時刻t+1の内部因子)及びノイズの分散を学習する。
【0014】
次に、この発明に従うシステムは、上記学習データを用いて、テストデータの初期値から現在までの正負極の劣化経路を推定し、未来の容量維持率を予測する。
【0015】
この発明に従うシステムは、好適には、二次電池を駆動源として使用するハイブリッド電気自動車(HEV)や、電気自動車(EV)における車載電子制御システムの一部として実装される。
【発明の効果】
【0016】
この発明によれば、交流インピーダンス曲線プロットが計測できないような環境(例えば、車載システムの環境)でも、交流インピーダンス曲線プロットを計測したのに近い精度で、バッテリの容量維持率を予測することが可能となり、電子機器・電動機器などにおいてバッテリの性能劣化を的確に知ることができるという効果が得られる。
【図面の簡単な説明】
【0017】
【図1】バッテリ用ECUと、バッテリを含む構成を示すブロック図である。
【図2】本発明を実施するための機能論理ブロック図である。
【図3】本発明に従い、バッテリの内部状態を推定するための処理のフローチャートを示す図である。
【図4】内部状態の値に基づき、バッテリの容量維持率を予測する処理のフローチャートを示す図である。
【発明を実施するための形態】
【0018】
以下、図面を参照して、本発明の実施例を説明する。特に断わらない限り、同一の参照番号は、図面を通して、同一の対象を指すものとする。また、以下で説明するのは、本発明の一実施形態であり、この発明を、この実施例で説明する内容に限定する意図はないことに留意されたい。
【0019】
図1は、本発明を実施するためのハードウェア構成のブロック図である。本発明は、これには限定されないが、この実施例は、車載システムの一部として本発明を実装するものである。特に図1は、車載システムにおいて、本発明に関連がある箇所のみを図示していることに留意されたい。
【0020】
図1に示されているのは、バッテリ用ECU110と、バッテリ130と、CAN(control area network)などの車載ネットワーク150である。
【0021】
バッテリ用ECU110は、CPUをもつ演算部112と、RAM、ROM及びフラッシュ・メモリなどの不揮発性メモリをもつメモリ114と、車載ネットワーク150との間でデータフレームなどの情報をやりとりする通信部116と、バッテリ130の状態をセンシングするセンサ機能部118を有する。
【0022】
バッテリ130は、好適には、電気自動車やハイブリッドカーに使用可能な充電池である。
【0023】
センサ機能部118は、バッテリ130の電圧、電流、温度、絶縁抵抗などをそれぞれ測定するための素子をもつ。演算部112は、センサ機能部118の測定データに基づき、SOC(充電状態)などを計算して求める機能をもつ。SOCを求める計算は、特開2001−330654号公報、特表2003−508881号公報、あるいは特開2005−19019号公報等に記載の方法を用いることができる。
【0024】
メモリ114は、ECU110全体の動作を制御する、オペレーティング・システムに相当するプログラムを含む。
【0025】
メモリ114にはさらに、本発明に従い、観測モデルのためのデータ、遷移モデルのためのデータ、及び観測モデル及び遷移モデルに基づき、センサ機能部118の測定データに従い、バッテリの容量維持率を予測する機能を実行するためのモジュールが含まれている。
【0026】
バッテリの容量維持率を予測する機能については、後でより詳細に説明する。
【0027】
次に、図2のブロック図を参照して、本発明の処理機能について説明する。図2において、バッテリ計測ブロック202は、センサ機能部118の機能をあらわすブロックであり、バッテリ130の電圧、電流、温度、絶縁抵抗などの測定値を与える。
【0028】
観測モデル204は、内部状態のベクトルziと、それに対応する容量維持率yiを事前に劣化試験により計測した結果を、{yi},{zi} i=1,2,...,Nとして、N個ずつ保存する。このように保存された{yi},{zi} i=1,2,...,Nを用いて、与えられたパラメータzに対して、容量維持率yを計算するための下記の式の定義も観測モデル204に含まれている。但し、この式を用いて容量維持率yを計算するのは、予測ブロック208の役割である。パラメータzは、好適には2次元であり、交流インピーダンス曲線から一部の値を取ってきた値を加工した特徴量が2つで2次元とすることができる。例えば、特徴点1=周波数2000Hzの虚軸ー周波数100Hzの虚軸、特徴点2=周波数1600Hzの実軸ー周波数100Hzの実軸などである。
【数1】
ここで、σkは、{zi}が正規分布に従うと想定した場合の分散である。
【0029】
尚、上記観測モデル204をあらわす式は、これには限定されず、内部状態Zから容量維持率yへの回帰であれば、任意の式を用いることができる。例えば、下記のような式も使うことができる。
【数2】
ここでGは、zのN個の最近傍の集合である。
【0030】
なお、ここでの回帰モデルは、動的計画法との適合性から、非線形回帰モデルを使うことが望ましい。
【0031】
遷移モデル206は、劣化環境が与えられると一定方向に移動するようにするためのモデルであって、ae(s,T)、ac(s,T)、he(s,T)、hc(s,T)の4つのデータをもつ。
ae(s,T)は、各劣化環境(SOC s,温度T)で放置したときの単位時間あたりの内部状態zの移動速度であり、予めバッテリを使った測定により求められる。例えば、縦軸が、0%〜100%を10ずつ10等分したSOCの目盛りであり、横軸が、マイナス30℃未満から始まって、マイナス30℃〜マイナス25℃、マイナス25℃〜マイナス20℃、・・・0℃〜5℃、5℃〜10℃、・・・10℃〜15℃、・・・55℃〜60℃、60℃以上の、5ずつの刻みにした升目毎のデータをテーブル形式でもっている。
【0032】
ac(s,T)は、各劣化環境(SOC s,温度T)で通電したときの単位通電量あたりの内部状態zの移動速度であり、予めバッテリを使った測定により求められる。例えば、縦軸が、0%〜100%を10ずつ10等分したSOCの目盛りであり、横軸が、マイナス30℃未満から始まって、マイナス30℃〜マイナス25℃、マイナス25℃〜マイナス20℃、・・・0℃〜5℃、5℃〜10℃、・・・10℃〜15℃、・・・55℃〜60℃、60℃以上の、5ずつの刻みにした升目毎のデータをテーブル形式でもっている。
【0033】
he(s,T)は、一定期間で劣化環境(SOC s,温度T)の状態に滞在した時間のヒストグラムである。予めバッテリを使った測定により求められる。
【0034】
hc(s,T)は、一定期間で劣化環境(SOC s,温度T)の状態で通電した通電量のヒストグラムである。予めバッテリを使った測定により求められる。
【0035】
遷移モデル206は、下記の式の定義も含む。予測ブロック208は、下記の式により、ある時間tでの内部状態ztから、次の時間t+1での内部状態zt+1を計算する。
【数3】
【0036】
予測ブロック208はさらに、将来のバッテリの容量維持率を予測するために、ブロック210から、将来の劣化環境の時系列wt+1,wt+2,wt+3,..を読み込む。将来の劣化環境の時系列のブロック210のデータは、将来の運転計画や運転習慣などから、予め決定される。例えば、通勤に自動車を使うなら、月曜日から金曜日までの通勤距離や、土日の使用プランなどに基づき、将来の劣化環境の時系列を決定することができる。
【0037】
次に、予測ブロック208の処理をより詳細に説明する。予測ブロック208の処理は、過去の劣化環境{wt}、容量維持率{yt}の時系列データから、時刻tの内部状態ztを求める。
【0038】
ここで、wt = {he,t, hc,t}
he,tは、数2の式でのhe(s,T)の時刻tでの値、hc,tは、数2の式でのhc(s,T)の時刻tでの値である。
【0039】
そこで、時刻tからt+1で、内部状態がztからzt+1に遷移するコストを次のように定義する。
【数4】
ここで、σobsは、観測モデルのノイズの分散、σtraは、遷移モデルのノイズの分散である。
【0040】
さらに、本発明に従い、次のような処理が行われる。
− 各時刻tの内部状態{zt}をN個に離散化し、各時刻毎にコストを格納するテーブルを作成する。このテーブルを、Zt,0,Zt,1,...,Zt,N-1とする。
− 時刻0の離散化された内部状態Z0,pを初期化する。内部状態の初期値z0 = 0なので、そこだけ0、それ以外は、∞、すなわち現実にはありえない大きい数をセットする。
− 次に、時刻を0にセットする。
・時刻t+1のp番目の内部状態Zt+1,pに着目する。
- 時刻tのq番目の内部状態Zt,qに着目し、この2つの状態間を遷移するコストC(Zt,q,Zt+1,p)を計算する。
- すべてのqについてC(Zt,q,Zt+1,p)を計算し、C(Zt,q,Zt+1,p)+Zt,qが最小になるcminを求める。
- cminをZt+1,pに格納する。
・上記処理をすべてのpに対して行う。
− tをインクリメントし、上記の処理を繰り返す。時刻tが現在時刻になったら終了。
− 時刻tのコストZt,0,Zt,1,...,Zt,Nの中で、最小になるNを探し、現在の内部状態utとして採用する。
【0041】
次に、図3のフローチャートを参照して、以上の処理を改めて説明する。図3において、ステップ302で、予測ブロック208は、遷移モデルzt+1 = g(zt,wt)の関数と、観測モデルyt = f(zt)の関数を入力として受け取る。
【0042】
次のステップ304では、予測ブロック208は、劣化環境{wt}、容量維持率{yt} t = 0,1,...,Tを入力として受け取る。これらは、バッテリ計測ブロック202からの測定結果に対して、必要に応じて予測ブロック208で演算処理を行うことで求めてもよい。
【0043】
次のステップ306では、予測ブロック208は、全時刻T=0,1,...,Tに対して、内部状態をN個に離散化したテーブルZ[T+1][N]を用意する。このテーブルは、好適には、メモリ部114のRAM領域に確保される。
【0044】
次のステップ308では、予測ブロック208は、Z[0][0],Z[0][1],...,Z[0][N-1]に∞をセットする。そして、Z[0][0](初期状態)に0をセットする。
【0045】
次のステップ310では、予測ブロック208は、時刻変数tに0をセットする。
【0046】
次のステップ312では、予測ブロック208は、変数pに0をセットする。
【0047】
次のステップ314では、予測ブロック208は、変数cminに∞をセットし、変数qに0をセットする。
【0048】
次のステップ316では、予測ブロック208は、内部状態pからqに遷移したときのコストC(Z[t][p],Z[t+1])を計算し、それをcにセットする。そして、c < cminなら、cmin = cとする。このコストの計算のとき、ステップ302で入力した関数が使用される。
【0049】
予測ブロック208は、ステップ318でqを1だけ増分し、ステップ320では、qがNに等しいかどうかを判断する。qがまだNに達していないなら、処理はステップ316に戻る。
【0050】
一方、もしqがNに等しいと判断されたなら、処理はステップ322に進み、そこで予測ブロック208は、Z[t+1][p]にcminをセットして、ステップ324でpを1つ増分し、ステップ326で、pがNに等しいかどうかを判断する。pがまだNに達していないなら、処理はステップ314に戻る。
【0051】
予測ブロック208は、pがNに達したと判断すると、ステップ328でtを1だけ増分し、ステップ330で、時刻tが現在時刻かどうか判断する。そうでなければ処理は、ステップ312に戻る。
【0052】
ステップ330で、tが現在時刻に達したと判断すると、予測ブロック208は、ステップ332で、Z[T][0],Z[T][1],...,Z[T][N]のうちの最小のものを選択し、対応する内部状態を現在の推定値とする。
【0053】
次に、このようにして求まった内部状態utから、将来の容量維持率の時系列yt+1, yt+2, ...を予測する方法を、図4のフローチャートを参照して説明する。
【0054】
予測ブロック208は、ステップ402で、時刻tに現在時刻をセットする。
【0055】
予測ブロック208は次に、ステップ404で、図3のフローチャートで示す処理で求められた内部状態を、内部状態utとしてセットする。
【0056】
予測ブロック208は次に、ステップ406で、将来の劣化環境の時系列時系列wt+1,wt+2,wt+3,..をブロック210から、読み込む。好適には、将来の劣化環境の時系列時系列は、当該の自動車の将来の運転プランから決定される。もし将来の運転プランが、過去とあまり変化しないことが期待されるなら、過去の劣化環境の時系列時系列を、そのまま将来に使うこともできる。
【0057】
予測ブロック208は次に、ステップ408で、ut+1 = g(ut,wt+1)により、次の時刻の内部状態ut+1を計算する。
【0058】
予測ブロック208は次に、ステップ410で、ステップ408で計算されたut+1を用いて、yt+1 = f(ut+1)によりyt+1を計算する。
【0059】
予測ブロック208は次に、ステップ412で、計算の結果得られたyt+1を、例えば、メモリ部114のフラッシュ・メモリに書き込むなどの方法により、出力する。
【0060】
予測ブロック208は次に、ステップ414で、時刻tを1だけ進めて、ステップ416で所望の時刻まで進んだかどうか判断する。そうでないならステップ408に戻り、一方、ステップ416で所望の時刻まで進んだ場合、そこで処理が終わる。
【0061】
本発明の予測技法が特に効果を奏するのは、容量維持率が同じで、正負極の劣化バランスが異なるような場合である。正負極の劣化バランスのずれは、実際の容量維持率の劣化速度に大きく効いてくるが、従来の、容量維持率の変化で容量維持率の劣化速度を予測する技法では、正負極の劣化バランスのずれを考慮できないので、予測の精度が低くなってしまう。
【0062】
本発明の予測技法は、正負極の劣化バランスのずれもきちんと考慮に入れて計算するので、より正確に容量維持率の劣化速度を予測することが可能となる。
【0063】
以上、車載システムの実施例に従い、本発明を説明してきたが、本発明が、充電器を用いる任意の製品の充電器の容量維持率の劣化速度予測に適用可能であることを、この分野の当業者なら理解するであろう。
【符号の説明】
【0064】
110 バッテリ用ECU
112 演算部
114 メモリ部
116 通信部
118 センサ機能部
130 バッテリ
202 バッテリ計測ブロック
204 観測モデル・ブロック
206 遷移モデル・ブロック
208 予測モデル・ブロック
210 将来の劣化環境の時系列ブロック
【特許請求の範囲】
【請求項1】
コンピュータの制御により、バッテリの容量維持率を予測する方法であって、
バッテリの内部状態を表す基礎データを基に容量維持率を算出する観測モデルと、時間的な1ステップ前の内部状態、劣化環境を現在の内部状態へ写像する遷移モデルを用意するステップと、
前記バッテリの時間的なステップ毎の計測値に基づき、前記観測モデルと前記遷移モデルから計算される予測値と実際の値の差異の自乗和が最小となる内部状態の遷移パスを見出すことにより、現在の時点の内部状態を求めるステップを有する、
バッテリの状態予測方法。
【請求項2】
前記バッテリの内部状態を表す基礎データが、正負極交流インピーダンス曲線プロットから抽出した特徴量である、請求項1に記載のバッテリの状態予測方法。
【請求項3】
前記自乗和が最小となる内部状態の遷移パスを見出すことが、動的計画法により行われる、請求項1に記載のバッテリの状態予測方法。
【請求項4】
未来のバッテリの劣化環境の時系列データを用意するステップと、
求められた前記現在の時点の内部状態と、前記未来のバッテリの劣化環境の時系列データに対して、前記観測モデルと前記遷移モデルを適用することにより順次、未来のバッテリの容量維持率を推定するステップを有する、
請求項1に記載のバッテリの状態予測方法。
【請求項5】
前記観測モデルが、非線形回帰モデルに基づき作成されている、請求項1に記載のバッテリの状態予測方法。
【請求項6】
前記劣化環境が、SOCと温度を含む、請求項1に記載のバッテリの状態予測方法。
【請求項7】
コンピュータの制御により、バッテリの容量維持率を予測するプログラムであって、
前記コンピュータに、
バッテリの内部状態を表す基礎データを基に容量維持率を算出する観測モデルと、時間的な1ステップ前の内部状態、劣化環境を現在の内部状態へ写像する遷移モデルを用意するステップと、
前記バッテリの時間的なステップ毎の計測値に基づき、前記観測モデルと前記遷移モデルから計算される予測値と実際の値の差異の自乗和が最小となる内部状態の遷移パスを見出すことにより、現在の時点の内部状態を求めるステップを実行させる、
バッテリの状態予測プログラム。
【請求項8】
前記バッテリの内部状態を表す基礎データが、正負極交流インピーダンス曲線プロットから抽出した特徴量である、請求項7に記載のバッテリの状態予測プログラム。
【請求項9】
前記自乗和が最小となる内部状態の遷移パスを見出すことが、動的計画法により行われる、請求項7に記載のバッテリの状態予測プログラム。
【請求項10】
未来のバッテリの劣化環境の時系列データを用意するステップと、
求められた前記現在の時点の内部状態と、前記未来のバッテリの劣化環境の時系列データに対して、前記観測モデルと前記遷移モデルを適用することにより順次、未来のバッテリの容量維持率を推定するステップを有する、
請求項7に記載のバッテリの状態予測プログラム。
【請求項11】
前記観測モデルが、非線形回帰モデルに基づき作成されている、請求項7に記載のバッテリの状態予測プログラム。
【請求項12】
前記劣化環境が、SOCと温度を含む、請求項7に記載のバッテリの状態予測プログラム。
【請求項13】
コンピュータの制御により、バッテリの容量維持率を予測するシステムであって、
記憶手段と、
前記記憶手段に保存された、バッテリの内部状態を表す基礎データを基に容量維持率を算出する観測モデルに関連するデータと、
前記記憶手段に保存された、時間的な1ステップ前の内部状態、劣化環境を現在の内部状態へ写像する遷移モデルに関連するデータと、
前記バッテリの時間的なステップ毎の計測値に基づき、前記観測モデルと前記遷移モデルから計算される予測値と実際の値の差異の自乗和が最小となる内部状態の遷移パスを見出すことにより、現在の時点の内部状態を求める手段を有する、
バッテリの状態予測システム。
【請求項14】
前記バッテリの内部状態を表す基礎データが、正負極交流インピーダンス曲線プロットから抽出した特徴量である、請求項13に記載のバッテリの状態予測システム。
【請求項15】
前記自乗和が最小となる内部状態の遷移パスを見出すことが、動的計画法により行われる、請求項13に記載のバッテリの状態予測システム。
【請求項16】
前記記憶手段に保存された、未来のバッテリの劣化環境の時系列データと、
求められた前記現在の時点の内部状態と、前記未来のバッテリの劣化環境の時系列データに対して、前記観測モデルと前記遷移モデルを適用することにより順次、未来のバッテリの容量維持率を推定する手段を有する、
請求項13に記載のバッテリの状態予測システム。
【請求項17】
前記観測モデルが、非線形回帰モデルに基づき作成されている、請求項13に記載のバッテリの状態予測システム。
【請求項18】
前記劣化環境が、SOCと温度を含む、請求項13に記載のバッテリの状態予測システム。
【請求項1】
コンピュータの制御により、バッテリの容量維持率を予測する方法であって、
バッテリの内部状態を表す基礎データを基に容量維持率を算出する観測モデルと、時間的な1ステップ前の内部状態、劣化環境を現在の内部状態へ写像する遷移モデルを用意するステップと、
前記バッテリの時間的なステップ毎の計測値に基づき、前記観測モデルと前記遷移モデルから計算される予測値と実際の値の差異の自乗和が最小となる内部状態の遷移パスを見出すことにより、現在の時点の内部状態を求めるステップを有する、
バッテリの状態予測方法。
【請求項2】
前記バッテリの内部状態を表す基礎データが、正負極交流インピーダンス曲線プロットから抽出した特徴量である、請求項1に記載のバッテリの状態予測方法。
【請求項3】
前記自乗和が最小となる内部状態の遷移パスを見出すことが、動的計画法により行われる、請求項1に記載のバッテリの状態予測方法。
【請求項4】
未来のバッテリの劣化環境の時系列データを用意するステップと、
求められた前記現在の時点の内部状態と、前記未来のバッテリの劣化環境の時系列データに対して、前記観測モデルと前記遷移モデルを適用することにより順次、未来のバッテリの容量維持率を推定するステップを有する、
請求項1に記載のバッテリの状態予測方法。
【請求項5】
前記観測モデルが、非線形回帰モデルに基づき作成されている、請求項1に記載のバッテリの状態予測方法。
【請求項6】
前記劣化環境が、SOCと温度を含む、請求項1に記載のバッテリの状態予測方法。
【請求項7】
コンピュータの制御により、バッテリの容量維持率を予測するプログラムであって、
前記コンピュータに、
バッテリの内部状態を表す基礎データを基に容量維持率を算出する観測モデルと、時間的な1ステップ前の内部状態、劣化環境を現在の内部状態へ写像する遷移モデルを用意するステップと、
前記バッテリの時間的なステップ毎の計測値に基づき、前記観測モデルと前記遷移モデルから計算される予測値と実際の値の差異の自乗和が最小となる内部状態の遷移パスを見出すことにより、現在の時点の内部状態を求めるステップを実行させる、
バッテリの状態予測プログラム。
【請求項8】
前記バッテリの内部状態を表す基礎データが、正負極交流インピーダンス曲線プロットから抽出した特徴量である、請求項7に記載のバッテリの状態予測プログラム。
【請求項9】
前記自乗和が最小となる内部状態の遷移パスを見出すことが、動的計画法により行われる、請求項7に記載のバッテリの状態予測プログラム。
【請求項10】
未来のバッテリの劣化環境の時系列データを用意するステップと、
求められた前記現在の時点の内部状態と、前記未来のバッテリの劣化環境の時系列データに対して、前記観測モデルと前記遷移モデルを適用することにより順次、未来のバッテリの容量維持率を推定するステップを有する、
請求項7に記載のバッテリの状態予測プログラム。
【請求項11】
前記観測モデルが、非線形回帰モデルに基づき作成されている、請求項7に記載のバッテリの状態予測プログラム。
【請求項12】
前記劣化環境が、SOCと温度を含む、請求項7に記載のバッテリの状態予測プログラム。
【請求項13】
コンピュータの制御により、バッテリの容量維持率を予測するシステムであって、
記憶手段と、
前記記憶手段に保存された、バッテリの内部状態を表す基礎データを基に容量維持率を算出する観測モデルに関連するデータと、
前記記憶手段に保存された、時間的な1ステップ前の内部状態、劣化環境を現在の内部状態へ写像する遷移モデルに関連するデータと、
前記バッテリの時間的なステップ毎の計測値に基づき、前記観測モデルと前記遷移モデルから計算される予測値と実際の値の差異の自乗和が最小となる内部状態の遷移パスを見出すことにより、現在の時点の内部状態を求める手段を有する、
バッテリの状態予測システム。
【請求項14】
前記バッテリの内部状態を表す基礎データが、正負極交流インピーダンス曲線プロットから抽出した特徴量である、請求項13に記載のバッテリの状態予測システム。
【請求項15】
前記自乗和が最小となる内部状態の遷移パスを見出すことが、動的計画法により行われる、請求項13に記載のバッテリの状態予測システム。
【請求項16】
前記記憶手段に保存された、未来のバッテリの劣化環境の時系列データと、
求められた前記現在の時点の内部状態と、前記未来のバッテリの劣化環境の時系列データに対して、前記観測モデルと前記遷移モデルを適用することにより順次、未来のバッテリの容量維持率を推定する手段を有する、
請求項13に記載のバッテリの状態予測システム。
【請求項17】
前記観測モデルが、非線形回帰モデルに基づき作成されている、請求項13に記載のバッテリの状態予測システム。
【請求項18】
前記劣化環境が、SOCと温度を含む、請求項13に記載のバッテリの状態予測システム。
【図1】


【図2】

【図3】
【図4】
【図2】
【図3】
【図4】
【公開番号】特開2013−19730(P2013−19730A)
【公開日】平成25年1月31日(2013.1.31)
【国際特許分類】
【出願番号】特願2011−152364(P2011−152364)
【出願日】平成23年7月8日(2011.7.8)
【出願人】(390009531)インターナショナル・ビジネス・マシーンズ・コーポレーション (4,084)
【氏名又は名称原語表記】INTERNATIONAL BUSINESS MASCHINES CORPORATION
【Fターム(参考)】
【公開日】平成25年1月31日(2013.1.31)
【国際特許分類】
【出願日】平成23年7月8日(2011.7.8)
【出願人】(390009531)インターナショナル・ビジネス・マシーンズ・コーポレーション (4,084)
【氏名又は名称原語表記】INTERNATIONAL BUSINESS MASCHINES CORPORATION
【Fターム(参考)】
[ Back to top ]