
位置検出装置
【課題】回路構成の簡素化に寄与することができる位置検出装置を提供する。
【解決手段】直列に接続される第1〜第4の二次コイル15a〜15dは、基板に直交する特定の軸回りに90°間隔で設けた。そして、これら二次コイル15a〜15dに対して、時間的な位相を互いに90°ずらして励磁するようにした。また、各二次コイル15a〜15dに発生するアナログ電圧の和である合成信号を、単一のA/D変換器21で取り込むようにした。A/D変換器21の取り込みタイミングとして、特定の二次コイルに発生する電圧が最大になる第1のタイミング、および、第1のタイミングにおける前記電圧の位相が時間的に90°ずれる第2のタイミングをそれぞれ設定した。第1および第2のタイミングでA/D変換器に取り込まれる合成信号のデジタル値の組み合わせに基づき、検出対象の位置を求めるようにした。
【解決手段】直列に接続される第1〜第4の二次コイル15a〜15dは、基板に直交する特定の軸回りに90°間隔で設けた。そして、これら二次コイル15a〜15dに対して、時間的な位相を互いに90°ずらして励磁するようにした。また、各二次コイル15a〜15dに発生するアナログ電圧の和である合成信号を、単一のA/D変換器21で取り込むようにした。A/D変換器21の取り込みタイミングとして、特定の二次コイルに発生する電圧が最大になる第1のタイミング、および、第1のタイミングにおける前記電圧の位相が時間的に90°ずれる第2のタイミングをそれぞれ設定した。第1および第2のタイミングでA/D変換器に取り込まれる合成信号のデジタル値の組み合わせに基づき、検出対象の位置を求めるようにした。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、位置検出装置に関する。
【背景技術】
【0002】
従来、誘導型の位置検出装置として、検出対象の回転位置を検出するレゾルバが知られている。レゾルバは、回転子および固定子を備えてなる。回転子には一次コイルが、固定子には2つの二次コイルがそれぞれ設けられる。2つの二次コイルは互いの角度差が90°になるように設けられる。一次コイルに励磁電圧を印加すると、2つの二次コイルを通じて、位相差が90°となる2つの出力電圧(正弦波および余弦波)が取り出される。これら出力電圧は、検出対象の回転角に応じて変化するので、これら出力電圧に基づき検出対象の回転位置を検出することができる。また、特許文献1には、このレゾルバと同様の検出原理を利用して、検出対象の傾斜を検出する傾斜検出装置が記載されている。当該装置は、検出対象の傾斜に伴い変位する磁性体を備えるとともに、当該磁性体の変位に応じて2つの二次コイルに誘起される出力電圧が変化することを利用して検出対象の傾斜を検出する。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開平10−176925号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところが、前記従来の誘導型の位置検出装置には、次のような問題があった。すなわち、2つの二次コイルに誘起される出力電圧は、それら二次コイルに対応して設けられる2つのA/D変換回路により、それぞれデジタル信号に変換される。そして、これら変換される2つのデジタル信号に基づき検出対象の位置が算出される。近年では、製品コストを低減するなどの観点から位置検出装置の回路構成の簡素化に対する要望もあるところ、前記従来の位置検出装置では2つのA/D変換回路が必要とされる。このことが回路構成の簡素化を図るうえでの阻害要因の一となっていた。
【0005】
本発明は上記問題点を解決するためになされたものであって、その目的は、回路構成の簡素化に寄与することができる位置検出装置を提供することにある。
【課題を解決するための手段】
【0006】
請求項1に記載の発明は、特定の軸の回りに90°間隔で設けられ、かつ互いに直列に接続された状態で、磁性体または導体からなる検出対象に対して相対変位可能に設けられる4つのコイルと、時間的な位相を互いに90°ずらして各コイルを励磁する励磁信号発生器と、前記励磁信号発生器を通じて励磁された際に、各コイルに発生するアナログ電圧の和である合成信号を、特定のコイルに発生する電圧が最大になる第1のタイミング、および、前記第1のタイミングにおける前記電圧の位相が時間的に90°ずれる第2のタイミングで取り込む単一のA/D変換器と、前記A/D変換器により前記第1および第2のタイミングで取り込まれる前記合成信号のデジタル値の組み合わせに基づき、前記検出対象の位置を演算する演算器と、を備えてなることをその要旨とする。
【0007】
本発明によれば、4つのコイルを直列に接続したうえで、これらコイルに対して時間的な位相を互いに90°ずらして励磁される。また、A/D変換器の取り込みタイミングとして、第1および第2のタイミングが設定されて、これら2回のタイミングで4つの二次コイルの合成信号が取り込まれる。第1のタイミングは、特定の二次コイルに発生するアナログ電圧の振幅が最大になるタイミング、第2のタイミングは、第1のタイミングに対して前記アナログ電圧の位相が90°だけずれるタイミングとされる。
【0008】
このため、第1のタイミングで取り込まれる4つのコイルの合成信号は、180°の位相差で励磁される特定のコイルを含む2つのコイルに発生する合成信号に応じた値になる。第2のタイミングで取り込まれる4つのコイルの合成信号は、残りの2つのコイルに発生する合成信号に応じた値になる。そしてこれら第1および第2のタイミングでサンプリングされる合成信号の値は、検出対象の位置に応じて変化する。すなわち、第1および第2のタイミングでサンプリングされる合成信号の値の組み合わせは、検出対象の位置に対して一義的なものとなる。
【0009】
したがって、単一のA/D変換器により、第1および第2のタイミングで取り込まれる4つのコイルの合成信号の値の組み合わせに基づき、検出対象の位置を検出可能となる。ここで、180°の位相差で励磁される2つのコイルを一組とする2組のコイル対の合成信号を、各組に対応する2つのA/D変換器により別々に取り込むことも想定されるところ、この場合と異なり、本発明では、単一のA/D変換器を設けるだけでよいので、その分、位置検出装置の回路構成の簡素化に寄与することができる。
【0010】
請求項2に記載の発明は、請求項1に記載の位置検出装置において、前記励磁信号発生器は、励磁周波数の4倍のクロック周波数を有するクロック信号を生成し、当該クロック信号に基づき設定されるタイミングで各コイルを励磁することをその要旨とする。
【0011】
本発明によれば、クロック信号のサンプリングのタイミングをずらすことにより、クロック周波数の1/4の周波数を有する励磁信号、ひいては時間的な位相が互いに90°ずれる4つの励磁信号を簡単に生成可能である。
【0012】
請求項3に記載の発明は、請求項1または請求2に記載の位置検出装置において、前記各コイルは、同一の設置面に設け、前記検出対象は、前記設置面に対する距離を変化させる態様で変位可能に設けられることをその要旨とする。
【0013】
本発明によれば、設置面に対する距離の変化に応じた合成信号が生成される。この合成信号に基づき検出対象の変位を検出可能となる。
請求項4に記載の発明は、請求項3に記載の位置検出装置において、前記設置面は平面とする一方で、当該平面に直交するように前記特定の軸を設定し、前記検出対象は、前記特定の軸に沿う方向において前記各コイルに対向するとともに、当該特定の軸に沿う方向における前記平面との距離を変化させる態様で変位可能に設けられることをその要旨とする。
【0014】
本発明によれば、検出対象とコイルの設置面である平面との距離に応じた合成信号が得られる。この合成信号に基づき、検出対象に対する平面へ向けた外力が印加された位置、すなわち押圧位置を検出可能となる。
【0015】
請求項5に記載の発明は、請求項1〜請求項3のうちいずれか一項に記載の位置検出装置において、前記各コイルは、前記特定の軸を中心とする仮想円筒面に沿って設け、前記検出対象は、前記特定の軸、または当該特定の軸に平行をなす他の軸を中心として回転可能に設けられることをその要旨とする。
【0016】
本発明によれば、単一のA/D変換器により、第1および第2のタイミングで取り込まれる4つのコイルの合成信号の値の組み合わせに基づき、検出対象の回転位置を検出可能となる。
【発明の効果】
【0017】
本発明によれば、位置検出装置の回路構成の簡素化に寄与することができる。
【図面の簡単な説明】
【0018】
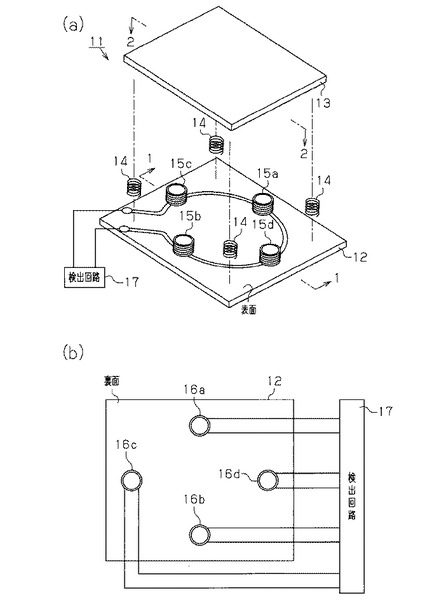
【図1】(a)は、第1の実施の形態における位置検出装置の分解斜視図、(b)は、同じく基板の下面図。
【図2】図1の1−1線断面図。
【図3】位置検出装置の回路ブロック図。
【図4】A/D変換器の取り込みタイミングを示す出力信号の波形図。
【図5】(a),(b)は、励磁信号の生成方法を示すクロック信号の波形図。
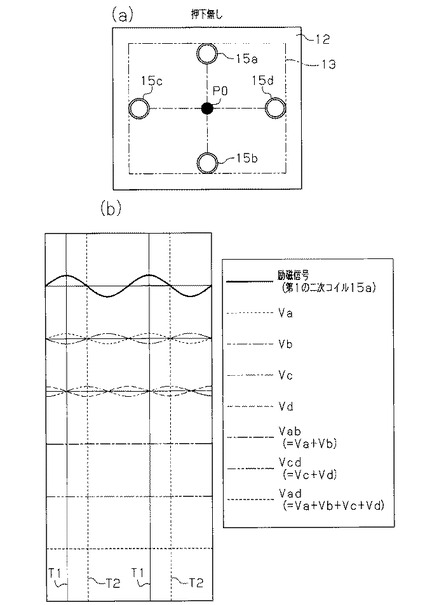
【図6】(a)は、図1の2−2線矢視図、(b)は、押下されないときの各波形図。
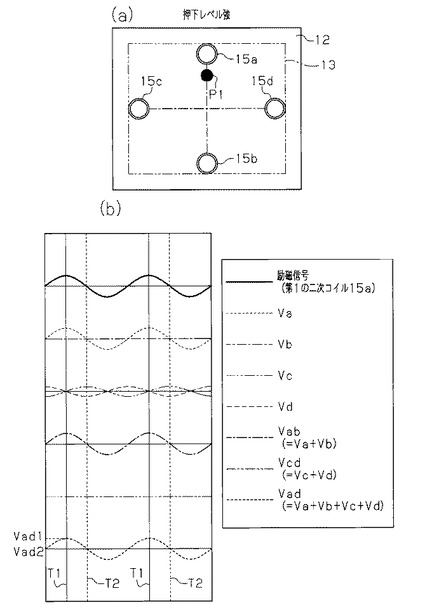
【図7】(a)は、押下位置を示す図1の2−2線矢視図、(b)は、図7(a)に示される押下位置において押下されたときの各波形図。
【図8】(a)は、他の押下位置を示す図1の2−2線矢視図、(b)は、図8(a)に示される押下位置において押下されたときの各波形図。
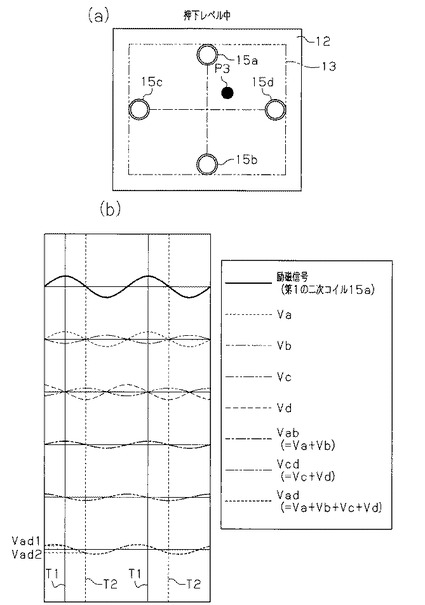
【図9】(a)は、他の押下位置を示す図1の2−2線矢視図、(b)は、図9(a)に示される押下位置において押下されたときの各波形図。
【図10】第2の実施の形態における位置検出装置の回路ブロック図。
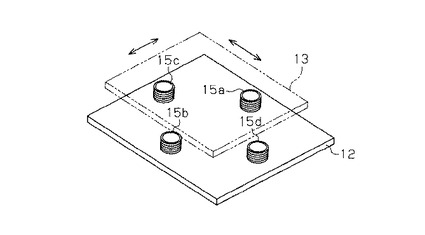
【図11】第3の実施の形態における位置検出装置の概略構成を示す斜視図。
【図12】他の実施の形態における図2に対応する断面図。
【発明を実施するための形態】
【0019】
<第1の実施の形態>
以下、本発明を、検出対象に対する押圧位置を検出する押圧位置検出装置に具体化した一実施の形態を図1(a),(b)〜図6(a),(b)に基づいて説明する。
【0020】
図1(a)に示すように、押圧位置検出装置11は、絶縁性を有する基板12、および基板12に対向する検出対象13を備えてなる。検出対象13は、鉄あるいはフェライトなどの磁性体により矩形板状に形成されている。基板12と検出対象13の四隅との間には、4つの圧縮コイルばね14がそれぞれ介在されている。検出対象13は、通常、基板12の表面に対して平行をなす状態に維持される。
【0021】
図2に示すように、検出対象13の基板12と反対側の側面に対して外力が印加された場合、検出対象13は、圧縮コイルばね14の弾性力に抗して、基板12に近接する方向へ変位する。たとえば、検出対象13の中央に対して基板12へ向けた外力が印加された場合、検出対象13は、基板12に対する平行状態を維持しつつ、4つの圧縮コイルばね14の弾性力に抗して基板12に近接する方向へ変位する。また、検出対象13の中央以外の部位に対して基板12へ向けた外力が印加された場合、検出対象13は、基板12の表面に対して傾斜しつつ、4つの圧縮コイルばね14の弾性力に抗して基板12に近接する方向へ変位する。
【0022】
押圧位置検出装置11は、この検出対象13の変位を検出し、その検出結果に基づき検出対象13における外力が印加された部位、すなわち検出対象13に対する押圧位置を検出する。そして、当該押圧位置を検出するために、つぎのような構成が採用されている。
【0023】
すなわち、図1(a)に示すように、基板12の表面には、導線がらせん状に巻回されてなる第1〜第4の二次コイル15a〜15dが設けられている。これら第1〜第4の二次コイル15a〜15dは、基板12に直交する軸線回りに90°ごとに設けられるとともに、互いに直列に接続されている。また、図1(b)に示すように、基板12の裏面には、第1〜第4の一次コイル16a〜16dが設けられている。これら第1〜第4の一次コイル16a〜16dも、基板12に直交する軸線回りに90°ごとに設けられている。また、これら第1〜第4の一次コイル16a〜16dは、基板12を介して第1〜第4の二次コイル15a〜15dにそれぞれ対向している。第1〜第4の一次コイル16a〜16dの両端、および互いに直列接続された第1〜第4の二次コイル15a〜15dの両端は、それぞれ検出回路17に接続されている。
【0024】
検出回路17は、第1〜第4の一次コイル16a〜16dにそれぞれ励磁信号を印加するとともに、検出対象13の変位に応じて第1〜第4の二次コイル15a〜15dの直列回路に誘起される電圧(正確には、第1〜第4の二次コイル15a〜15dにそれぞれ誘起される電圧の和である合成信号)に基づき、検出対象13の位置を求める。
【0025】
第1〜第4の二次コイル15a〜15dにそれぞれ誘起される電圧は、これら第1〜第4の二次コイル15a〜15dに対する検出対象13の近接位置関係に応じて変化する。すなわち、第1〜第4の二次コイル15a〜15dと、検出対象13との距離に応じて、第1〜第4の二次コイル15a〜15dと、これらに対応する第1〜第4の一次コイル16a〜16dとの間の磁気結合(電磁誘導結合)の度合いが変化する。検出対象13が、第1〜第4の二次コイル15a〜15dに対して近接するほど、これら第1〜第4の二次コイル15a〜15dに誘起される電圧の値は大きくなる。逆に、検出対象13が、第1〜第4の二次コイル15a〜15dに対して離間するほど、これら第1〜第4の二次コイル15a〜15dに誘起される電圧の値は小さくなる。
【0026】
<検出回路>
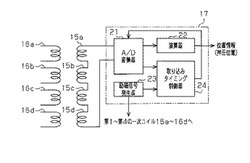
つぎに、検出回路17の構成について説明する。図3に示すように、検出回路17は、A/D変換器21、および演算器22を備えてなる。また、検出回路17は、励磁信号発生器23、および取り込みタイミング制御器24を備えてなる。
【0027】
A/D変換器21は、第1〜第4の二次コイル15a〜15dの出力電圧(アナログ電圧)の和である合成信号を取り込み、この取り込まれる合成信号をデジタル信号(デジタル値)に変換する。
【0028】
演算器22は、A/D変換器21により生成されるデジタル信号に基づき、検出対象13の変位、すなわち検出対象13に対する押圧位置を演算する。
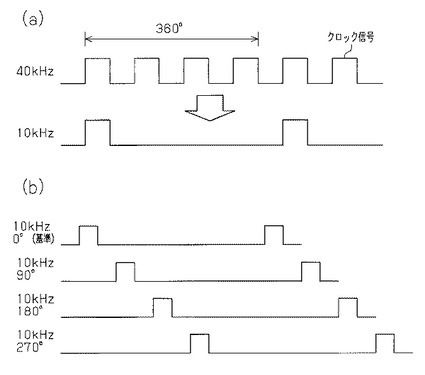
励磁信号発生器23は、励磁信号を生成し、この生成した励磁信号を第1〜第4の一次コイル16a〜16dにそれぞれ印加する。本例では、励磁信号発生器23は、励磁信号の周波数の4倍のクロック周波数を有している。すなわち、励磁信号発生器23の発振器は、励磁信号の周波数の4倍の周波数を有するクロック信号を生成する。たとえば、励磁信号の周波数が10kHzとした場合、励磁信号発生器23のクロック周波数は40kHzとされる。励磁信号発生器23は、発振器により生成されるクロック信号に基づき設定されるタイミングで、時間的な位相が互いに90°ずれた4つの励磁信号を生成し、これら生成される励磁信号を第1〜第4の一次コイル16a〜16dにそれぞれ印加する。具体的には、第1の一次コイル16aに印加する励磁信号の位相を基準、すなわち位相差0°としたとき、第2の一次コイル16bには180°、第3の一次コイル16cには90°、第4の一次コイル16dには270°の位相差を有する励磁信号を印加する。
【0029】
励磁信号発生器23は、これら励磁信号をつぎのようにして生成する。すなわち、図5(a)に示されるように、40kHzのクロック信号において、4周期ごとにタイミングをとれば、10kHzの励磁信号が生成可能である。そして、図5(b)に示されるように、クロック信号のサンプリングのタイミングを、たとえば1パルス分ずつずらすことにより、90°の位相差を有する励磁信号の生成が可能である。
【0030】
取り込みタイミング制御器24は、第1〜第4の一次コイル16a〜16dに対して励磁信号を印加するタイミングと、互いに直列に接続された第1〜第4の二次コイル15a〜15dの合成信号を取り込むタイミングとの同期をとる。すなわち、取り込みタイミング制御器24は、励磁信号発生器23において生成されるクロック信号、およびA/D変換器21の変換結果をそれぞれ取り込み、これら取り込まれるクロック信号、およびA/D変換結果に基づき、A/D変換器21の取り込みタイミングを制御する。
【0031】
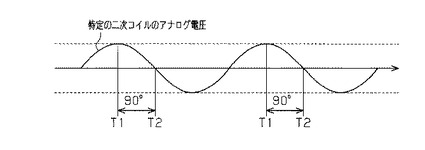
取り込みタイミング制御器24は、第1〜第4の二次コイル15a〜15dのうち特定の二次コイル(たとえば、第1の二次コイル15a)の出力電圧の振幅が最大になる第1のタイミングT1を記憶している。図4に示されるように、取り込みタイミング制御器24は、励磁信号発生器23において生成されるクロック信号に基づき、第1のタイミングT1が到来した旨検出されるごとに、合成信号のA/D変換結果を取り込む旨示す指令信号を生成する。また、取り込みタイミング制御器24は、第1のタイミングT1に対して特定の二次コイル(ここでは、第1の二次コイル15a)の時間的な位相が90°だけずれる第2のタイミングT2も記憶している。取り込みタイミング制御器24は、励磁信号発生器23において生成されるクロック信号に基づき、第2のタイミングT2が到来した旨検出されるごとに、合成信号のA/D変換結果を取り込む旨示す指令信号を生成する。A/D変換器21は、取り込みタイミング制御器24において生成される指令信号に基づき、合成信号を取り込む(正確には、RAMに格納する)。なお、第1および第2のタイミングT1,T2は、実験あるいはシミュレーションなどによって予め求められる。
【0032】
<押圧位置の検出方法>
つぎに、押圧位置検出装置による押圧位置の検出方法について説明する。なお、ここでは、第1の二次コイル15aの出力信号Va(電圧)の振幅が最大となるタイミングを第1のタイミングT1、この第1のタイミングT1に対する出力信号Vaの時間的な位相が90°だけずれるポイントを第2のタイミングT2とする。
【0033】
<通常の状態>
まず、図6(a)に示されるように、検出対象13に対して外力が印加されない通常状態である旨検出する方法を説明する。
【0034】
この場合、第1〜第4の二次コイル15a〜15dの出力信号の振幅は、図6(b)のグラフに示されるように変化する。第1および第2の二次コイル15a,15bの出力信号Va,Vbは、互いに位相が180°ずれる。これは、第1および第2の二次コイル15a,15bは、互いに逆位相で励磁されるからである。また、第3および第4の二次コイル15c,15dの出力信号Vc,Vdは、第1および第2の二次コイル15a,15bの出力信号Va,Vbに対して、それぞれ位相が90°だけずれる。これは、第3および第4の二次コイル15c,15dは、第1および第2の二次コイル15a,15bに対してそれぞれ90°ずつ位相をずらして励磁されるからである。また、第3および第4の二次コイル15c,15dの出力信号Vc,Vdは、互いに位相が180°ずれる。これは、第3および第4の二次コイル15c,15dは、互いに逆位相で励磁されるからである。
【0035】
このため、第1および第2の二次コイル15a,15bの出力信号Va,Vbの和で表される合成信号Vab、ならびに第3および第4の二次コイル15c,15dの出力信号Vc,Vdの和で表される合成信号Vcdは、それぞれ0(零)となる。ひいては、第1〜第4の二次コイル15a〜15dの出力信号Va〜Vdの和である合成信号Vadの値も0(零)となる。したがって、第1および第2のタイミングT1,T2においてサンプリングされる第1および第2の合成信号Vad1,Vad2の値は、それぞれ0となる。検出回路17は、これら第1および第2の合成信号Vad1,Vad2の値の組み合わせに基づき、検出対象13が押下されていない通常状態である旨検出する。すなわち、第1〜第4の二次コイル15a〜15dと検出対象13との間の距離は、それぞれ同等であることが分かる。
【0036】
なお、この通常状態において、検出対象13の中央部であるポイントP0に外力が印加された場合、各出力信号Va〜Vdの振幅は増大するものの、第1および第2のタイミングT1,T2における第1および第2の合成信号Vad1,Vad2の値は、それぞれ0となる。第1〜第4の二次コイル15a〜15dと検出対象13との間の距離は、前述の通常状態のときに比べて小さくなるものの、同等であることに変わりはない。このため、検出対象13のポイントP0に対する外力の印加の有無を検出する場合には、たとえば基板12に近接センサなどの検出手段を別途設ける。検出回路17は、合成信号Vadの値が0(零)に維持される状態で、検出手段を通じて検出対象13の基板12に対する近接が検出される場合には、検出対象13のポイントP0が押下された旨判定する。
【0037】
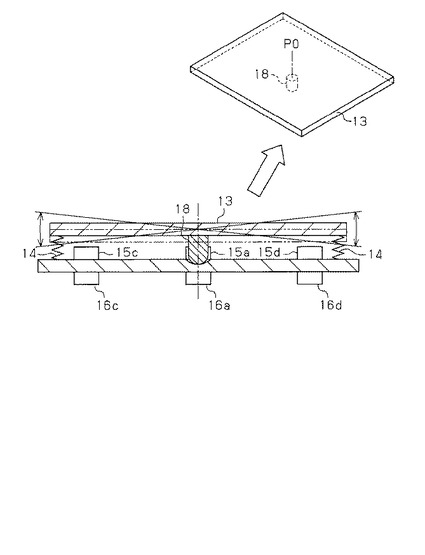
また、ポイントP0の押下の検出が要求されない場合には、押圧位置検出装置を、つぎのように構成してもよい。すなわち、図12に示すように、検出対象13の裏面(基板12側の面)において、ポイントP0に対応する部位にピボット軸18を設け、当該ピボット軸18を支点として検出対象13を傾動可能とする。
【0038】
<第1のポイントP1が押下された場合>
つぎに、図7(a)に第1のポイントP1で示されるように、検出対象13における第1の二次コイル15aの近傍の部位に対して大きな外力が印加された場合について説明する。
【0039】
この場合、検出対象13は、圧縮コイルばね14の弾性力に抗して、かつ外力の大きさに応じて、第1の二次コイル15aに近接する一方で、第2の二次コイル15bに対しては離間するように傾斜する。すると、図7(b)に示されるように、第1の二次コイル15aの出力信号Vaの振幅は、先の図6(b)に示される通常状態の場合に比べて、検出対象13が近接する分だけ増大する。これに対して、第2の二次コイル15bの出力信号Vbは、先の通常状態の場合に比べて検出対象13が離間することにより、振幅が小さくなる(図中では、0に近似した状態を示す)。また、第3および第4の二次コイル15c,15dの出力信号Vc,Vdの振幅は、通常状態のときと同様に変化する。
【0040】
第1および第2の二次コイル15a,15bの出力信号Va,Vbの和で表される合成信号Vabの振幅は、第1の二次コイル15aの出力信号Vaと同様に変化する。すなわち、第1のタイミングT1における合成信号Vabの振幅は、先の通常状態の場合に比べて、正の値で増大する。また、第3および第4の二次コイル15c,15dの出力信号Vc,Vdの和で表される合成信号Vcdは、それぞれ0(零)となる。第3および第4の二次コイル15c,15dの出力信号Vc,Vdは、互いに逆位相であって、互いにキャンセルされるからである。このため、第1〜第4の二次コイル15a〜15dの出力信号Va〜Vdの和で表される合成信号Vadの振幅は、第1の二次コイル15aの出力信号Vaと同様に変化する。
【0041】
したがって、第1のタイミングT1における第1の合成信号Vad1の値は、印加される外力に応じた正の値となる。また、第2のタイミングT2における第2の合成信号Vad2の値は0(零)となる。検出回路17は、これら第1および第2の合成信号Vad1,Vad2の値の組み合わせに基づき、検出対象13における押圧位置は、第1の二次コイル15aに対応する部位である旨認識可能である。検出回路17は、検出対象13に対する押圧位置に関する情報を生成する。
【0042】
<第2のポイントP2が押下された場合>
つぎに、図8(a)に第2のポイントP2で示されるように、検出対象13における第2の二次コイル15bの近傍の部位に対して大きな外力が印加された場合について説明する。
【0043】
この場合、検出対象13は、圧縮コイルばね14の弾性力に抗して、かつ外力の大きさに応じて、第2の二次コイル15bに近接する一方で、第1の二次コイル15aに対しては離間するように傾斜する。すると、図8(b)に示されるように、第2の二次コイル15bの出力信号Vbの振幅は、先の図6(b)に示される通常状態の場合に比べて、検出対象13が近接する分だけ増大する。これに対して、第1の二次コイル15aの出力信号Vaは、先の通常状態の場合に比べて検出対象13が離間することにより、振幅が小さくなる(図中では、0に近似した状態を示す。)。また、第3および第4の二次コイル15c,15dの出力信号Vc,Vdの振幅は、通常状態のときと同様に変化する。
【0044】
第1および第2の二次コイル15a,15bの出力信号Va,Vbの和で表される合成信号Vabの振幅は、第2の二次コイル15bの出力信号Vbと同様に変化する。すなわち、第1のタイミングT1における合成信号Vabの振幅は、先の通常状態の場合に比べて、負の値で増大する。また、第3および第4の二次コイル15c,15dの出力信号Vc,Vdの和で表される合成信号Vcdは、それぞれ0(零)となる。第3および第4の二次コイル15c,15dの出力信号Vc,Vdは、互いに逆位相であって、互いにキャンセルされるからである。このため、第1〜第4の二次コイル15a〜15dの出力信号Va〜Vdの和で表される合成信号Vadの振幅は、第2の二次コイル15bの出力信号Vbと同様に変化する。
【0045】
したがって、第1のタイミングT1における第1の合成信号Vad1の値は、印加される外力に応じた負の値となる。また、第2のタイミングT2における第2の合成信号Vad2の値は0(零)となる。検出回路17は、これら第1および第2の合成信号Vad1,Vad2の値の組み合わせに基づき、検出対象13における押圧位置は、第2の二次コイル15bに対応する部位である旨認識可能である。検出回路17は、検出対象13に対する押圧位置に関する情報を生成する。
【0046】
なお、検出対象13において、第3または第4の二次コイル15c,15dの近傍の部位が押下された場合についても、前述と同様にして、その押下位置が検出可能である。
<第3のポイントP3が押下された場合>
つぎに、図9(a)に第3のポイントP3で示されるように、検出対象13における第1の二次コイル15aおよび第4の二次コイル15dとの間の部位に対して外力が印加された場合について説明する。ここでの外力は、先の第1および第2のポイントP1,P2に印加された外力よりも小さな中程度のものである。
【0047】
この場合、検出対象13は、圧縮コイルばね14の弾性力に抗して、かつ外力の大きさに応じて、第1および第4の二次コイル15a,15dに近接する一方で、第2および第3の二次コイル15b,15cに対しては離間するように傾斜する。すると、図9(b)に示されるように、第1および第4の二次コイル15a,15dの出力信号Vaの振幅は、先の図6(b)に示される通常状態の場合に比べて、検出対象13が近接する分だけ増大する。これに対して、第2および第3の二次コイル15b,15cの出力信号Vb,Vcの振幅は、先の通常状態の場合に比べて検出対象13が離間する分だけ減少する。
【0048】
第1および第2の二次コイル15a,15bの合成信号Vabの振幅は、第1の二次コイル15aの出力信号Vaの振幅よりも、逆位相である第2の二次コイル15bの振幅の分だけ小さくなる。すなわち、第1のタイミングT1において、合成信号Vabの値は、正の中程度の値をとる。また、第3および第4の二次コイル15c,15dの合成信号Vcdの振幅は、第4の二次コイル15dの出力信号Vdの振幅よりも、逆位相である第3の二次コイル15cの振幅の分だけ小さくなる。すなわち、第2のタイミングT2において、合成信号Vcdの値は、負の中程度の値をとる。
【0049】
そして、第1のタイミングT1における第1の合成信号Vad1の値は、印加される外力に応じた正の中程度の値となる。また、第2のタイミングT2における第2の合成信号Vad2の値については、印加される外力に応じた負の中程度の値になる。検出回路17は、これら第1および第2の合成信号Vad1,Vad2の値の組み合わせに基づき、検出対象13における押圧位置は、第1の二次コイル15aと第4の二次コイル15dとの間に対応する部位である旨認識可能である。
【0050】
なお、検出対象13において、第1の二次コイル15aと第3の二次コイル15cとの間、ならびに、第3の二次コイル15cと第2の二次コイル15bとの間、ならびに、第2の二次コイル15bと第4の二次コイル15dとの間のいずれの部位が押下された場合についても、前述と同様にして、その押下位置が検出可能である。
【0051】
このように、第1のタイミングT1においては、第1および第2の二次コイル15a,15bの合成信号Vabが現れる。また、第2のタイミングT2においては、第3および第4の二次コイル15c,15dの合成信号Vcdが現れる。このため、A/D変換器21が1つであっても、第1および第2のタイミングT1,T2においてそれぞれ取り込まれる第1〜第4の二次コイル15a〜15dの第1および第2の合成信号Vad1,Vad2の組み合わせに基づいて、検出対象13に対する押下位置を検出可能となる。
【0052】
<実施の形態の効果>
したがって、本実施の形態によれば、以下の効果を得ることができる。
(1)第1〜第4の二次コイル15a〜15dを直列に接続したうえで、これら二次コイルに対して時間的な位相を互いに90°ずらして励磁するようにした。また、A/D変換器21の取り込みタイミングとして、第1および第2のタイミングT1,T2を設定して、これら2回のタイミングで第1〜第4の二次コイル15a〜15dの第1および第2の合成信号Vad1,Vad2を取り込む(すなわち、図示しないRAMに格納する)ようにした。ここで、第1のタイミングT1は、特定の二次コイル(ここでは、第1の二次コイル15a)の出力電圧の振幅が最大になるタイミング、第2のタイミングT2は、第1のタイミングT1に対して前記出力電圧の位相が90°だけずれるタイミングとした。
【0053】
このため、第1のタイミングT1で取り込まれる第1〜第4の二次コイル15a〜15dの第1の合成信号Vad1は、180°の位相差で励磁される第1および第2の二次コイル15a,15bに発生する合成信号Vabに応じた値になる。第2のタイミングT2で取り込まれる4つのコイルの第2の合成信号Vad2は、残りの第3および第4の二次コイル15c,15dに発生する合成信号Vcdに応じた値になる。そしてこれら第1および第2のタイミングT1,T2でサンプリングされる第1および第2の合成信号Vad1,Vad2の値は、検出対象13の位置(押圧位置)に応じて変化する。すなわち、第1および第2のタイミングT1,T2でサンプリングされる第1および第2の合成信号Vad1,Vad2の値の組み合わせは、検出対象13の位置に対して一義的なものとなる。
【0054】
したがって、単一のA/D変換器21により、第1および第2のタイミングT1,T2で取り込まれる第1〜第4の二次コイル15a〜15dの合成信号の値の組み合わせに基づき、検出対象13の位置を検出可能となる。ここで、180°の位相差で励磁される2つの二次コイルを一組とする2組のコイル対の合成信号を、各組に対応する2つのA/D変換器により別々に取り込むことも想定されるところ、この場合と異なり、本例では、単一のA/D変換器21を設けるだけでよいので、その分、押圧位置検出装置11の回路構成の簡素化に寄与することができる。
【0055】
(2)また、回路構成が簡素化されることにより、検出回路17、ひいては押圧位置検出装置11の製品コストの低減化にも寄与することができる。
(3)また、検出対象13に対する任意の押圧位置が検出可能となることから、本例の押圧位置検出装置11を利用して多方向スイッチ装置を構築することも可能である。
【0056】
(4)励磁信号発生器23は、励磁信号の周波数の4倍のクロック周波数を有している。すなわち、励磁信号発生器23の発振器は、励磁信号の周波数の4倍の周波数を有するクロック信号を生成し、当該クロック信号に基づき設定されるタイミングで第1〜第4の二次コイル15a〜15dをそれぞれ励磁する。すなわち、クロック信号のサンプリングのタイミングをずらすことにより、クロック周波数(40kHz)の1/4の周波数(10kHz)を有する励磁信号、ひいては時間的な位相が互いに90°ずれる4つの励磁信号を簡単に生成可能である。
【0057】
(5)第1〜第4の二次コイル15a〜15dは、同一の設置面である基板12の表面に設けた。そして、検出対象13は、基板12の表面に対する距離を変化させる態様で変位可能に設けられる。具体的には、基板12には、4つの圧縮コイルばね14を介して、検出対象13を支持するようにした。
【0058】
このため、第1〜第4の二次コイル15a〜15dは、検出対象13の押下、すなわち検出対象13に対する基板12へ向けた外力の印加に伴う、当該検出対象13と基板12の表面との間の距離の変化に応じた合成信号を生成する。そして、第1および第2のタイミングT1,T2で取り込まれる第1〜第4の二次コイル15a〜15dの第1および第2の合成信号Vad1,Vad2の値の組み合わせに基づき、検出対象13における押圧位置を検出可能となる。
【0059】
<第2の実施の形態>
つぎに、本発明を検出対象の回転位置を検出する回転位置検出装置に具体化した第2の実施の形態を説明する。当該回転の検出回路は、先の図3に示される前記第1の実施形態の検出回路と同様の構成とされる。
【0060】
図10に示すように、回転位置検出装置31は、特定の回転軸Oを中心として偏心回転する検出対象32の回転位置を検出する。この検出対象32は、鉄などの磁性体により、円柱状あるいは円板状に形成される。そして、検出対象32の外周には、第1〜第4の二次コイル15a〜15dが非接触状態で設けられている。これら第1〜第4の二次コイル15a〜15dは、回転軸Oの回りに90°間隔で設けられている。すなわち、第1〜第4の二次コイル15a〜15dは、それらの設置面として回転軸Oを中心とする仮想円筒面に沿って設けられる。また、第1〜第4の二次コイル15a〜15dの中心線は、それぞれ回転軸Oに交わるように指向している。
【0061】
検出対象32が偏心して回転すると、当該回転位置に応じて、第1〜第4の二次コイル15a〜15dと、検出対象32との間の距離がそれぞれ変化する。これら距離の変化に応じて、第1〜第4の二次コイル15a〜15dを貫く磁束の量が変化する。その結果、第1〜第4の二次コイル15a〜15dに誘起される電圧の大きさも変化する。なお、図10では省略したが、本例においても、第1〜第4の二次コイル15a〜15dのそれぞれに対応して、第1〜第4の一次コイル16a〜16dが設けられる。
【0062】
そして、検出回路17は、前記第1の実施の形態と同様にして、第1〜第4の一次コイル16a〜16dにそれぞれ励磁信号を印加するとともに、検出対象13の回転変位に応じて第1〜第4の二次コイル15a〜15dの直列回路に誘起される電圧に基づき、検出対象32の回転位置を求める。すなわち、第1および第2のタイミングT1,T2においてそれぞれA/D変換器21に取り込まれる第1〜第4の二次コイル15a〜15dの第1および第2の合成信号Vad1,Vad2の組み合わせに基づいて、検出対象13の回転位置が検出される。なお、第1〜第4の二次コイル15a〜15dの合成信号の振幅は、検出対象32と第1〜第4の二次コイル15a〜15dとの距離の変化に応じて、前記第1の実施の形態に準ずるかたちで変化する。このため、単一のA/D変換器21が設けられた検出回路17により、検出対象32の1回転(360°)中の回転位置を検出可能となる。これは、検出対象32が1回転するごとに、第1〜第4の二次コイル15a〜15dに誘起される電圧の波形、ひいてはこれら第1〜第4の二次コイル15a〜15dの合成信号の振幅は、同様に変化するためである。
【0063】
したがって、本実施の形態によれば、以下の効果を得ることができる。
(6)第1〜第4の二次コイル15a〜15dは、同一の設置面である仮想円筒面の中心軸の回りに90°間隔で設けた。そして、検出対象32は、当該仮想円筒面の中心軸と一致する回転軸Oを中心として第1〜第4の二次コイル15a〜15dに非接触状態で、かつ仮想円筒面との距離を変化させる態様で回転可能に設けられる。
【0064】
このため、第1〜第4の二次コイル15a〜15dは、検出対象13の回転軸Oを中心とする回転に伴う、当該検出対象32と仮想円筒面(第1〜第4の二次コイル15a〜15d)との間の距離の変化に応じた合成信号を生成する。そして、前記第1の実施の形態と同様に、第1および第2のタイミングT1,T2で取り込まれる第1〜第4の二次コイル15a〜15dの第1および第2の合成信号Vad1,Vad2の値の組み合わせに基づき、検出対象32の回転位置が検出可能となる。
【0065】
<第3の実施の形態>
つぎに、本発明を検出対象のスライド位置を検出するスライド位置検出装置に具体化した第3の実施の形態を説明する。本例の検出回路は、先の図3に示される前記第1の実施形態の検出回路と同様の構成とされる。
【0066】
本例は、図11に示すように、基板12に対して、検出対象13を平行にスライド移動させる点で前記第1の実施の形態と異なる。検出対象13は、基板12上の第1〜第4の二次コイル15a〜15dに対して一定の距離をおいて、互いに交わる2方向へスライド移動可能に設けられる。
【0067】
検出対象13のスライド移動に伴い、対向する第1〜第4の二次コイル15a〜15dの端面の面積が変化する。このように、検出対象13と第1〜第4の二次コイル15a〜15dとの対向面積の変化に応じて、第1〜第4の二次コイル15a〜15dを貫く磁束の量が変化することにより、第1〜第4の二次コイル15a〜15dに誘起される電圧の大きさも変化する。
【0068】
そして、検出回路17は、前記第1の実施の形態と同様にして、第1〜第4の一次コイル16a〜16dにそれぞれ励磁信号を印加するとともに、検出対象13のスライド変位に応じて第1〜第4の二次コイル15a〜15dの直列回路に誘起される電圧に基づき、検出対象32のスライド位置を求める。すなわち、第1および第2のタイミングT1,T2においてそれぞれ取り込まれる第1〜第4の二次コイル15a〜15dの第1および第2の合成信号Vad1,Vad2の組み合わせに基づいて、検出対象13のスライド位置を検出する。
【0069】
したがって、本実施の形態によれば、単一のA/D変換器21が設けられた検出回路17により、検出対象32のスライド位置を検出可能となる。
<他の実施の形態>
なお、前記実施の形態は、次のように変更して実施してもよい。
【0070】
・第1の実施の形態では、検出対象を矩形板状にしたが、円形、楕円形など他の形状としてもよい。
・第2の実施の形態では、円柱状あるいは円板状の検出対象32を偏心回転させることにより、第1〜第4の二次コイル15a〜15dとの距離を変化させるようにしたが、たとえば検出対象の形状として、いわゆる涙形、あるいは楕円形などの形状を採用してもよい。すなわち、検出対象の回転に応じて、第1〜第4の二次コイル15a〜15dの磁界の変化が発生すればよい。このようにしても、検出対象32の回転を検出可能である。
【0071】
・また、第2の実施の形態では、検出対象32は、第1〜第4の二次コイル15a〜15dが沿って設けられる仮想円筒面の中心軸でもある回転軸Oを中心として偏心回転するようにしたが、仮想円筒面の中心軸(回転軸O)に平行をなす他の軸を中心として偏心回転するようにしてもよい。このようにしても、検出対象32の回転に応じて、第1〜第4の二次コイル15a〜15dの磁界の変化が発生する。
【0072】
・第1〜第3の実施の形態では、第1〜第4の二次コイル15a〜15dを同一の設置面上に設けたが、異なる設置面に設けてもよい。すなわち、検出対象13,32の変位に応じて、第1〜第4の二次コイル15a〜15dの磁界の変化が発生すればよい。
【0073】
・第1〜第3の実施の形態では、検出対象13を磁性体としたが、電気の導体としてもよい。この導体として、たとえば銅などの非磁性体を検出対象13として採用することが可能である。この場合、検出対象13,32が、第1〜第4の二次コイル15a〜15dに対して近接するほど、これら第1〜第4の二次コイル15a〜15dに誘起される電圧の値は小さくなる。逆に、検出対象13,32が、第1〜第4の二次コイル15a〜15dに対して離間するほど、これら第1〜第4の二次コイル15a〜15dに誘起される電圧の値は大きくなる。
【0074】
・第1〜第3の実施の形態において、第1〜第4の一次コイル16a〜16d、ならびに第1〜第4の二次コイル15a〜15dは、それぞれ磁性体により形成されるコア(鉄心)に巻回する態様で設けてもよい。
【0075】
・第1〜第3の実施の形態において、第1〜第4の一次コイル16a〜16d、ならびに第1〜第4の二次コイル15a〜15dは、基板12に金属などの導体がプリントされてなる平面アンテナとしてもよい。このようにすれば、位置検出装置の体格を小さくすることが可能である。
【0076】
・第1〜第3の実施の形態では、第1〜第4の一次コイル16a〜16dに個別に励磁信号を印加することにより、互いに直列に接続される第1〜第4の二次コイル15a〜15dをそれぞれ励磁するようにしたが、つぎのようにしてもよい。すなわち、第1〜第4の二次コイル15a〜15dに対して個別に励磁信号を印加する。このようにすれば、第1〜第4の二次コイル15a〜15dが、それぞれ一次コイルとしても機能するので、第1〜第4の一次コイル16a〜16dが省略可能となる。
【0077】
・第1の実施の形態では押圧位置検出装置として、第2の実施の形態では回転位置検出装置として、第3の実施の形態ではスライド位置検出装置として、本発明を具体化したが、傾斜検出装置として具体化することも可能である。たとえば、第1〜第4の二次コイル15a〜15dをケースに固定的に設けるとともに、磁性体により円柱状あるいは円盤状に形成される検出対象を、自重によりケースに対して相対的に変位可能に設ける。ケースが傾斜したとき、検出対象は、ケース、ひいては第1〜第4の二次コイル15a〜15dに対して相対的に変位する。第1〜第4の二次コイル15a〜15dは、検出対象の変位に応じた出力信号を生成する。この生成される出力信号は、ケースの傾斜に応じたものとなる。このように、検出回路17のA/D変換器21を単一とした場合であれ、第1〜第4の二次コイル15a〜15dに対して相対的に変位することにより、第1〜第4の二次コイル15a〜15dの磁界を変化させる磁性体からなる検出対象の様々な変位を検出可能である。
【0078】
<他の技術的思想>
次に、前記実施の形態から把握できる技術的思想を以下に追記する。
(イ)請求項3に記載の位置検出装置において、前記設置面は円筒面とし、前記各コイルは、前記特定の軸としての前記円筒面の中心軸の回りに90°間隔で設け、前記検出対象は、前記中心軸を中心として、前記円筒面との距離を変化させる態様で回転変位可能に設けられる位置検出装置。この構成によれば、検出対象とコイルの設置面である円筒面との距離に応じた合成信号が得られる。この合成信号に基づき、検出対象の回転位置を検出可能となる。
【符号の説明】
【0079】
11…押圧位置検出装置、12…基板、13,32…検出対象、15a〜15d…第1〜第4の二次コイル、16a〜16d…第1〜第4の一次コイル、21…A/D変換器、22…演算器、23…励磁信号発生器、31…回転位置検出装置、T1…第1のタイミング、T2…第2のタイミング。
【技術分野】
【0001】
本発明は、位置検出装置に関する。
【背景技術】
【0002】
従来、誘導型の位置検出装置として、検出対象の回転位置を検出するレゾルバが知られている。レゾルバは、回転子および固定子を備えてなる。回転子には一次コイルが、固定子には2つの二次コイルがそれぞれ設けられる。2つの二次コイルは互いの角度差が90°になるように設けられる。一次コイルに励磁電圧を印加すると、2つの二次コイルを通じて、位相差が90°となる2つの出力電圧(正弦波および余弦波)が取り出される。これら出力電圧は、検出対象の回転角に応じて変化するので、これら出力電圧に基づき検出対象の回転位置を検出することができる。また、特許文献1には、このレゾルバと同様の検出原理を利用して、検出対象の傾斜を検出する傾斜検出装置が記載されている。当該装置は、検出対象の傾斜に伴い変位する磁性体を備えるとともに、当該磁性体の変位に応じて2つの二次コイルに誘起される出力電圧が変化することを利用して検出対象の傾斜を検出する。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開平10−176925号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところが、前記従来の誘導型の位置検出装置には、次のような問題があった。すなわち、2つの二次コイルに誘起される出力電圧は、それら二次コイルに対応して設けられる2つのA/D変換回路により、それぞれデジタル信号に変換される。そして、これら変換される2つのデジタル信号に基づき検出対象の位置が算出される。近年では、製品コストを低減するなどの観点から位置検出装置の回路構成の簡素化に対する要望もあるところ、前記従来の位置検出装置では2つのA/D変換回路が必要とされる。このことが回路構成の簡素化を図るうえでの阻害要因の一となっていた。
【0005】
本発明は上記問題点を解決するためになされたものであって、その目的は、回路構成の簡素化に寄与することができる位置検出装置を提供することにある。
【課題を解決するための手段】
【0006】
請求項1に記載の発明は、特定の軸の回りに90°間隔で設けられ、かつ互いに直列に接続された状態で、磁性体または導体からなる検出対象に対して相対変位可能に設けられる4つのコイルと、時間的な位相を互いに90°ずらして各コイルを励磁する励磁信号発生器と、前記励磁信号発生器を通じて励磁された際に、各コイルに発生するアナログ電圧の和である合成信号を、特定のコイルに発生する電圧が最大になる第1のタイミング、および、前記第1のタイミングにおける前記電圧の位相が時間的に90°ずれる第2のタイミングで取り込む単一のA/D変換器と、前記A/D変換器により前記第1および第2のタイミングで取り込まれる前記合成信号のデジタル値の組み合わせに基づき、前記検出対象の位置を演算する演算器と、を備えてなることをその要旨とする。
【0007】
本発明によれば、4つのコイルを直列に接続したうえで、これらコイルに対して時間的な位相を互いに90°ずらして励磁される。また、A/D変換器の取り込みタイミングとして、第1および第2のタイミングが設定されて、これら2回のタイミングで4つの二次コイルの合成信号が取り込まれる。第1のタイミングは、特定の二次コイルに発生するアナログ電圧の振幅が最大になるタイミング、第2のタイミングは、第1のタイミングに対して前記アナログ電圧の位相が90°だけずれるタイミングとされる。
【0008】
このため、第1のタイミングで取り込まれる4つのコイルの合成信号は、180°の位相差で励磁される特定のコイルを含む2つのコイルに発生する合成信号に応じた値になる。第2のタイミングで取り込まれる4つのコイルの合成信号は、残りの2つのコイルに発生する合成信号に応じた値になる。そしてこれら第1および第2のタイミングでサンプリングされる合成信号の値は、検出対象の位置に応じて変化する。すなわち、第1および第2のタイミングでサンプリングされる合成信号の値の組み合わせは、検出対象の位置に対して一義的なものとなる。
【0009】
したがって、単一のA/D変換器により、第1および第2のタイミングで取り込まれる4つのコイルの合成信号の値の組み合わせに基づき、検出対象の位置を検出可能となる。ここで、180°の位相差で励磁される2つのコイルを一組とする2組のコイル対の合成信号を、各組に対応する2つのA/D変換器により別々に取り込むことも想定されるところ、この場合と異なり、本発明では、単一のA/D変換器を設けるだけでよいので、その分、位置検出装置の回路構成の簡素化に寄与することができる。
【0010】
請求項2に記載の発明は、請求項1に記載の位置検出装置において、前記励磁信号発生器は、励磁周波数の4倍のクロック周波数を有するクロック信号を生成し、当該クロック信号に基づき設定されるタイミングで各コイルを励磁することをその要旨とする。
【0011】
本発明によれば、クロック信号のサンプリングのタイミングをずらすことにより、クロック周波数の1/4の周波数を有する励磁信号、ひいては時間的な位相が互いに90°ずれる4つの励磁信号を簡単に生成可能である。
【0012】
請求項3に記載の発明は、請求項1または請求2に記載の位置検出装置において、前記各コイルは、同一の設置面に設け、前記検出対象は、前記設置面に対する距離を変化させる態様で変位可能に設けられることをその要旨とする。
【0013】
本発明によれば、設置面に対する距離の変化に応じた合成信号が生成される。この合成信号に基づき検出対象の変位を検出可能となる。
請求項4に記載の発明は、請求項3に記載の位置検出装置において、前記設置面は平面とする一方で、当該平面に直交するように前記特定の軸を設定し、前記検出対象は、前記特定の軸に沿う方向において前記各コイルに対向するとともに、当該特定の軸に沿う方向における前記平面との距離を変化させる態様で変位可能に設けられることをその要旨とする。
【0014】
本発明によれば、検出対象とコイルの設置面である平面との距離に応じた合成信号が得られる。この合成信号に基づき、検出対象に対する平面へ向けた外力が印加された位置、すなわち押圧位置を検出可能となる。
【0015】
請求項5に記載の発明は、請求項1〜請求項3のうちいずれか一項に記載の位置検出装置において、前記各コイルは、前記特定の軸を中心とする仮想円筒面に沿って設け、前記検出対象は、前記特定の軸、または当該特定の軸に平行をなす他の軸を中心として回転可能に設けられることをその要旨とする。
【0016】
本発明によれば、単一のA/D変換器により、第1および第2のタイミングで取り込まれる4つのコイルの合成信号の値の組み合わせに基づき、検出対象の回転位置を検出可能となる。
【発明の効果】
【0017】
本発明によれば、位置検出装置の回路構成の簡素化に寄与することができる。
【図面の簡単な説明】
【0018】
【図1】(a)は、第1の実施の形態における位置検出装置の分解斜視図、(b)は、同じく基板の下面図。
【図2】図1の1−1線断面図。
【図3】位置検出装置の回路ブロック図。
【図4】A/D変換器の取り込みタイミングを示す出力信号の波形図。
【図5】(a),(b)は、励磁信号の生成方法を示すクロック信号の波形図。
【図6】(a)は、図1の2−2線矢視図、(b)は、押下されないときの各波形図。
【図7】(a)は、押下位置を示す図1の2−2線矢視図、(b)は、図7(a)に示される押下位置において押下されたときの各波形図。
【図8】(a)は、他の押下位置を示す図1の2−2線矢視図、(b)は、図8(a)に示される押下位置において押下されたときの各波形図。
【図9】(a)は、他の押下位置を示す図1の2−2線矢視図、(b)は、図9(a)に示される押下位置において押下されたときの各波形図。
【図10】第2の実施の形態における位置検出装置の回路ブロック図。
【図11】第3の実施の形態における位置検出装置の概略構成を示す斜視図。
【図12】他の実施の形態における図2に対応する断面図。
【発明を実施するための形態】
【0019】
<第1の実施の形態>
以下、本発明を、検出対象に対する押圧位置を検出する押圧位置検出装置に具体化した一実施の形態を図1(a),(b)〜図6(a),(b)に基づいて説明する。
【0020】
図1(a)に示すように、押圧位置検出装置11は、絶縁性を有する基板12、および基板12に対向する検出対象13を備えてなる。検出対象13は、鉄あるいはフェライトなどの磁性体により矩形板状に形成されている。基板12と検出対象13の四隅との間には、4つの圧縮コイルばね14がそれぞれ介在されている。検出対象13は、通常、基板12の表面に対して平行をなす状態に維持される。
【0021】
図2に示すように、検出対象13の基板12と反対側の側面に対して外力が印加された場合、検出対象13は、圧縮コイルばね14の弾性力に抗して、基板12に近接する方向へ変位する。たとえば、検出対象13の中央に対して基板12へ向けた外力が印加された場合、検出対象13は、基板12に対する平行状態を維持しつつ、4つの圧縮コイルばね14の弾性力に抗して基板12に近接する方向へ変位する。また、検出対象13の中央以外の部位に対して基板12へ向けた外力が印加された場合、検出対象13は、基板12の表面に対して傾斜しつつ、4つの圧縮コイルばね14の弾性力に抗して基板12に近接する方向へ変位する。
【0022】
押圧位置検出装置11は、この検出対象13の変位を検出し、その検出結果に基づき検出対象13における外力が印加された部位、すなわち検出対象13に対する押圧位置を検出する。そして、当該押圧位置を検出するために、つぎのような構成が採用されている。
【0023】
すなわち、図1(a)に示すように、基板12の表面には、導線がらせん状に巻回されてなる第1〜第4の二次コイル15a〜15dが設けられている。これら第1〜第4の二次コイル15a〜15dは、基板12に直交する軸線回りに90°ごとに設けられるとともに、互いに直列に接続されている。また、図1(b)に示すように、基板12の裏面には、第1〜第4の一次コイル16a〜16dが設けられている。これら第1〜第4の一次コイル16a〜16dも、基板12に直交する軸線回りに90°ごとに設けられている。また、これら第1〜第4の一次コイル16a〜16dは、基板12を介して第1〜第4の二次コイル15a〜15dにそれぞれ対向している。第1〜第4の一次コイル16a〜16dの両端、および互いに直列接続された第1〜第4の二次コイル15a〜15dの両端は、それぞれ検出回路17に接続されている。
【0024】
検出回路17は、第1〜第4の一次コイル16a〜16dにそれぞれ励磁信号を印加するとともに、検出対象13の変位に応じて第1〜第4の二次コイル15a〜15dの直列回路に誘起される電圧(正確には、第1〜第4の二次コイル15a〜15dにそれぞれ誘起される電圧の和である合成信号)に基づき、検出対象13の位置を求める。
【0025】
第1〜第4の二次コイル15a〜15dにそれぞれ誘起される電圧は、これら第1〜第4の二次コイル15a〜15dに対する検出対象13の近接位置関係に応じて変化する。すなわち、第1〜第4の二次コイル15a〜15dと、検出対象13との距離に応じて、第1〜第4の二次コイル15a〜15dと、これらに対応する第1〜第4の一次コイル16a〜16dとの間の磁気結合(電磁誘導結合)の度合いが変化する。検出対象13が、第1〜第4の二次コイル15a〜15dに対して近接するほど、これら第1〜第4の二次コイル15a〜15dに誘起される電圧の値は大きくなる。逆に、検出対象13が、第1〜第4の二次コイル15a〜15dに対して離間するほど、これら第1〜第4の二次コイル15a〜15dに誘起される電圧の値は小さくなる。
【0026】
<検出回路>
つぎに、検出回路17の構成について説明する。図3に示すように、検出回路17は、A/D変換器21、および演算器22を備えてなる。また、検出回路17は、励磁信号発生器23、および取り込みタイミング制御器24を備えてなる。
【0027】
A/D変換器21は、第1〜第4の二次コイル15a〜15dの出力電圧(アナログ電圧)の和である合成信号を取り込み、この取り込まれる合成信号をデジタル信号(デジタル値)に変換する。
【0028】
演算器22は、A/D変換器21により生成されるデジタル信号に基づき、検出対象13の変位、すなわち検出対象13に対する押圧位置を演算する。
励磁信号発生器23は、励磁信号を生成し、この生成した励磁信号を第1〜第4の一次コイル16a〜16dにそれぞれ印加する。本例では、励磁信号発生器23は、励磁信号の周波数の4倍のクロック周波数を有している。すなわち、励磁信号発生器23の発振器は、励磁信号の周波数の4倍の周波数を有するクロック信号を生成する。たとえば、励磁信号の周波数が10kHzとした場合、励磁信号発生器23のクロック周波数は40kHzとされる。励磁信号発生器23は、発振器により生成されるクロック信号に基づき設定されるタイミングで、時間的な位相が互いに90°ずれた4つの励磁信号を生成し、これら生成される励磁信号を第1〜第4の一次コイル16a〜16dにそれぞれ印加する。具体的には、第1の一次コイル16aに印加する励磁信号の位相を基準、すなわち位相差0°としたとき、第2の一次コイル16bには180°、第3の一次コイル16cには90°、第4の一次コイル16dには270°の位相差を有する励磁信号を印加する。
【0029】
励磁信号発生器23は、これら励磁信号をつぎのようにして生成する。すなわち、図5(a)に示されるように、40kHzのクロック信号において、4周期ごとにタイミングをとれば、10kHzの励磁信号が生成可能である。そして、図5(b)に示されるように、クロック信号のサンプリングのタイミングを、たとえば1パルス分ずつずらすことにより、90°の位相差を有する励磁信号の生成が可能である。
【0030】
取り込みタイミング制御器24は、第1〜第4の一次コイル16a〜16dに対して励磁信号を印加するタイミングと、互いに直列に接続された第1〜第4の二次コイル15a〜15dの合成信号を取り込むタイミングとの同期をとる。すなわち、取り込みタイミング制御器24は、励磁信号発生器23において生成されるクロック信号、およびA/D変換器21の変換結果をそれぞれ取り込み、これら取り込まれるクロック信号、およびA/D変換結果に基づき、A/D変換器21の取り込みタイミングを制御する。
【0031】
取り込みタイミング制御器24は、第1〜第4の二次コイル15a〜15dのうち特定の二次コイル(たとえば、第1の二次コイル15a)の出力電圧の振幅が最大になる第1のタイミングT1を記憶している。図4に示されるように、取り込みタイミング制御器24は、励磁信号発生器23において生成されるクロック信号に基づき、第1のタイミングT1が到来した旨検出されるごとに、合成信号のA/D変換結果を取り込む旨示す指令信号を生成する。また、取り込みタイミング制御器24は、第1のタイミングT1に対して特定の二次コイル(ここでは、第1の二次コイル15a)の時間的な位相が90°だけずれる第2のタイミングT2も記憶している。取り込みタイミング制御器24は、励磁信号発生器23において生成されるクロック信号に基づき、第2のタイミングT2が到来した旨検出されるごとに、合成信号のA/D変換結果を取り込む旨示す指令信号を生成する。A/D変換器21は、取り込みタイミング制御器24において生成される指令信号に基づき、合成信号を取り込む(正確には、RAMに格納する)。なお、第1および第2のタイミングT1,T2は、実験あるいはシミュレーションなどによって予め求められる。
【0032】
<押圧位置の検出方法>
つぎに、押圧位置検出装置による押圧位置の検出方法について説明する。なお、ここでは、第1の二次コイル15aの出力信号Va(電圧)の振幅が最大となるタイミングを第1のタイミングT1、この第1のタイミングT1に対する出力信号Vaの時間的な位相が90°だけずれるポイントを第2のタイミングT2とする。
【0033】
<通常の状態>
まず、図6(a)に示されるように、検出対象13に対して外力が印加されない通常状態である旨検出する方法を説明する。
【0034】
この場合、第1〜第4の二次コイル15a〜15dの出力信号の振幅は、図6(b)のグラフに示されるように変化する。第1および第2の二次コイル15a,15bの出力信号Va,Vbは、互いに位相が180°ずれる。これは、第1および第2の二次コイル15a,15bは、互いに逆位相で励磁されるからである。また、第3および第4の二次コイル15c,15dの出力信号Vc,Vdは、第1および第2の二次コイル15a,15bの出力信号Va,Vbに対して、それぞれ位相が90°だけずれる。これは、第3および第4の二次コイル15c,15dは、第1および第2の二次コイル15a,15bに対してそれぞれ90°ずつ位相をずらして励磁されるからである。また、第3および第4の二次コイル15c,15dの出力信号Vc,Vdは、互いに位相が180°ずれる。これは、第3および第4の二次コイル15c,15dは、互いに逆位相で励磁されるからである。
【0035】
このため、第1および第2の二次コイル15a,15bの出力信号Va,Vbの和で表される合成信号Vab、ならびに第3および第4の二次コイル15c,15dの出力信号Vc,Vdの和で表される合成信号Vcdは、それぞれ0(零)となる。ひいては、第1〜第4の二次コイル15a〜15dの出力信号Va〜Vdの和である合成信号Vadの値も0(零)となる。したがって、第1および第2のタイミングT1,T2においてサンプリングされる第1および第2の合成信号Vad1,Vad2の値は、それぞれ0となる。検出回路17は、これら第1および第2の合成信号Vad1,Vad2の値の組み合わせに基づき、検出対象13が押下されていない通常状態である旨検出する。すなわち、第1〜第4の二次コイル15a〜15dと検出対象13との間の距離は、それぞれ同等であることが分かる。
【0036】
なお、この通常状態において、検出対象13の中央部であるポイントP0に外力が印加された場合、各出力信号Va〜Vdの振幅は増大するものの、第1および第2のタイミングT1,T2における第1および第2の合成信号Vad1,Vad2の値は、それぞれ0となる。第1〜第4の二次コイル15a〜15dと検出対象13との間の距離は、前述の通常状態のときに比べて小さくなるものの、同等であることに変わりはない。このため、検出対象13のポイントP0に対する外力の印加の有無を検出する場合には、たとえば基板12に近接センサなどの検出手段を別途設ける。検出回路17は、合成信号Vadの値が0(零)に維持される状態で、検出手段を通じて検出対象13の基板12に対する近接が検出される場合には、検出対象13のポイントP0が押下された旨判定する。
【0037】
また、ポイントP0の押下の検出が要求されない場合には、押圧位置検出装置を、つぎのように構成してもよい。すなわち、図12に示すように、検出対象13の裏面(基板12側の面)において、ポイントP0に対応する部位にピボット軸18を設け、当該ピボット軸18を支点として検出対象13を傾動可能とする。
【0038】
<第1のポイントP1が押下された場合>
つぎに、図7(a)に第1のポイントP1で示されるように、検出対象13における第1の二次コイル15aの近傍の部位に対して大きな外力が印加された場合について説明する。
【0039】
この場合、検出対象13は、圧縮コイルばね14の弾性力に抗して、かつ外力の大きさに応じて、第1の二次コイル15aに近接する一方で、第2の二次コイル15bに対しては離間するように傾斜する。すると、図7(b)に示されるように、第1の二次コイル15aの出力信号Vaの振幅は、先の図6(b)に示される通常状態の場合に比べて、検出対象13が近接する分だけ増大する。これに対して、第2の二次コイル15bの出力信号Vbは、先の通常状態の場合に比べて検出対象13が離間することにより、振幅が小さくなる(図中では、0に近似した状態を示す)。また、第3および第4の二次コイル15c,15dの出力信号Vc,Vdの振幅は、通常状態のときと同様に変化する。
【0040】
第1および第2の二次コイル15a,15bの出力信号Va,Vbの和で表される合成信号Vabの振幅は、第1の二次コイル15aの出力信号Vaと同様に変化する。すなわち、第1のタイミングT1における合成信号Vabの振幅は、先の通常状態の場合に比べて、正の値で増大する。また、第3および第4の二次コイル15c,15dの出力信号Vc,Vdの和で表される合成信号Vcdは、それぞれ0(零)となる。第3および第4の二次コイル15c,15dの出力信号Vc,Vdは、互いに逆位相であって、互いにキャンセルされるからである。このため、第1〜第4の二次コイル15a〜15dの出力信号Va〜Vdの和で表される合成信号Vadの振幅は、第1の二次コイル15aの出力信号Vaと同様に変化する。
【0041】
したがって、第1のタイミングT1における第1の合成信号Vad1の値は、印加される外力に応じた正の値となる。また、第2のタイミングT2における第2の合成信号Vad2の値は0(零)となる。検出回路17は、これら第1および第2の合成信号Vad1,Vad2の値の組み合わせに基づき、検出対象13における押圧位置は、第1の二次コイル15aに対応する部位である旨認識可能である。検出回路17は、検出対象13に対する押圧位置に関する情報を生成する。
【0042】
<第2のポイントP2が押下された場合>
つぎに、図8(a)に第2のポイントP2で示されるように、検出対象13における第2の二次コイル15bの近傍の部位に対して大きな外力が印加された場合について説明する。
【0043】
この場合、検出対象13は、圧縮コイルばね14の弾性力に抗して、かつ外力の大きさに応じて、第2の二次コイル15bに近接する一方で、第1の二次コイル15aに対しては離間するように傾斜する。すると、図8(b)に示されるように、第2の二次コイル15bの出力信号Vbの振幅は、先の図6(b)に示される通常状態の場合に比べて、検出対象13が近接する分だけ増大する。これに対して、第1の二次コイル15aの出力信号Vaは、先の通常状態の場合に比べて検出対象13が離間することにより、振幅が小さくなる(図中では、0に近似した状態を示す。)。また、第3および第4の二次コイル15c,15dの出力信号Vc,Vdの振幅は、通常状態のときと同様に変化する。
【0044】
第1および第2の二次コイル15a,15bの出力信号Va,Vbの和で表される合成信号Vabの振幅は、第2の二次コイル15bの出力信号Vbと同様に変化する。すなわち、第1のタイミングT1における合成信号Vabの振幅は、先の通常状態の場合に比べて、負の値で増大する。また、第3および第4の二次コイル15c,15dの出力信号Vc,Vdの和で表される合成信号Vcdは、それぞれ0(零)となる。第3および第4の二次コイル15c,15dの出力信号Vc,Vdは、互いに逆位相であって、互いにキャンセルされるからである。このため、第1〜第4の二次コイル15a〜15dの出力信号Va〜Vdの和で表される合成信号Vadの振幅は、第2の二次コイル15bの出力信号Vbと同様に変化する。
【0045】
したがって、第1のタイミングT1における第1の合成信号Vad1の値は、印加される外力に応じた負の値となる。また、第2のタイミングT2における第2の合成信号Vad2の値は0(零)となる。検出回路17は、これら第1および第2の合成信号Vad1,Vad2の値の組み合わせに基づき、検出対象13における押圧位置は、第2の二次コイル15bに対応する部位である旨認識可能である。検出回路17は、検出対象13に対する押圧位置に関する情報を生成する。
【0046】
なお、検出対象13において、第3または第4の二次コイル15c,15dの近傍の部位が押下された場合についても、前述と同様にして、その押下位置が検出可能である。
<第3のポイントP3が押下された場合>
つぎに、図9(a)に第3のポイントP3で示されるように、検出対象13における第1の二次コイル15aおよび第4の二次コイル15dとの間の部位に対して外力が印加された場合について説明する。ここでの外力は、先の第1および第2のポイントP1,P2に印加された外力よりも小さな中程度のものである。
【0047】
この場合、検出対象13は、圧縮コイルばね14の弾性力に抗して、かつ外力の大きさに応じて、第1および第4の二次コイル15a,15dに近接する一方で、第2および第3の二次コイル15b,15cに対しては離間するように傾斜する。すると、図9(b)に示されるように、第1および第4の二次コイル15a,15dの出力信号Vaの振幅は、先の図6(b)に示される通常状態の場合に比べて、検出対象13が近接する分だけ増大する。これに対して、第2および第3の二次コイル15b,15cの出力信号Vb,Vcの振幅は、先の通常状態の場合に比べて検出対象13が離間する分だけ減少する。
【0048】
第1および第2の二次コイル15a,15bの合成信号Vabの振幅は、第1の二次コイル15aの出力信号Vaの振幅よりも、逆位相である第2の二次コイル15bの振幅の分だけ小さくなる。すなわち、第1のタイミングT1において、合成信号Vabの値は、正の中程度の値をとる。また、第3および第4の二次コイル15c,15dの合成信号Vcdの振幅は、第4の二次コイル15dの出力信号Vdの振幅よりも、逆位相である第3の二次コイル15cの振幅の分だけ小さくなる。すなわち、第2のタイミングT2において、合成信号Vcdの値は、負の中程度の値をとる。
【0049】
そして、第1のタイミングT1における第1の合成信号Vad1の値は、印加される外力に応じた正の中程度の値となる。また、第2のタイミングT2における第2の合成信号Vad2の値については、印加される外力に応じた負の中程度の値になる。検出回路17は、これら第1および第2の合成信号Vad1,Vad2の値の組み合わせに基づき、検出対象13における押圧位置は、第1の二次コイル15aと第4の二次コイル15dとの間に対応する部位である旨認識可能である。
【0050】
なお、検出対象13において、第1の二次コイル15aと第3の二次コイル15cとの間、ならびに、第3の二次コイル15cと第2の二次コイル15bとの間、ならびに、第2の二次コイル15bと第4の二次コイル15dとの間のいずれの部位が押下された場合についても、前述と同様にして、その押下位置が検出可能である。
【0051】
このように、第1のタイミングT1においては、第1および第2の二次コイル15a,15bの合成信号Vabが現れる。また、第2のタイミングT2においては、第3および第4の二次コイル15c,15dの合成信号Vcdが現れる。このため、A/D変換器21が1つであっても、第1および第2のタイミングT1,T2においてそれぞれ取り込まれる第1〜第4の二次コイル15a〜15dの第1および第2の合成信号Vad1,Vad2の組み合わせに基づいて、検出対象13に対する押下位置を検出可能となる。
【0052】
<実施の形態の効果>
したがって、本実施の形態によれば、以下の効果を得ることができる。
(1)第1〜第4の二次コイル15a〜15dを直列に接続したうえで、これら二次コイルに対して時間的な位相を互いに90°ずらして励磁するようにした。また、A/D変換器21の取り込みタイミングとして、第1および第2のタイミングT1,T2を設定して、これら2回のタイミングで第1〜第4の二次コイル15a〜15dの第1および第2の合成信号Vad1,Vad2を取り込む(すなわち、図示しないRAMに格納する)ようにした。ここで、第1のタイミングT1は、特定の二次コイル(ここでは、第1の二次コイル15a)の出力電圧の振幅が最大になるタイミング、第2のタイミングT2は、第1のタイミングT1に対して前記出力電圧の位相が90°だけずれるタイミングとした。
【0053】
このため、第1のタイミングT1で取り込まれる第1〜第4の二次コイル15a〜15dの第1の合成信号Vad1は、180°の位相差で励磁される第1および第2の二次コイル15a,15bに発生する合成信号Vabに応じた値になる。第2のタイミングT2で取り込まれる4つのコイルの第2の合成信号Vad2は、残りの第3および第4の二次コイル15c,15dに発生する合成信号Vcdに応じた値になる。そしてこれら第1および第2のタイミングT1,T2でサンプリングされる第1および第2の合成信号Vad1,Vad2の値は、検出対象13の位置(押圧位置)に応じて変化する。すなわち、第1および第2のタイミングT1,T2でサンプリングされる第1および第2の合成信号Vad1,Vad2の値の組み合わせは、検出対象13の位置に対して一義的なものとなる。
【0054】
したがって、単一のA/D変換器21により、第1および第2のタイミングT1,T2で取り込まれる第1〜第4の二次コイル15a〜15dの合成信号の値の組み合わせに基づき、検出対象13の位置を検出可能となる。ここで、180°の位相差で励磁される2つの二次コイルを一組とする2組のコイル対の合成信号を、各組に対応する2つのA/D変換器により別々に取り込むことも想定されるところ、この場合と異なり、本例では、単一のA/D変換器21を設けるだけでよいので、その分、押圧位置検出装置11の回路構成の簡素化に寄与することができる。
【0055】
(2)また、回路構成が簡素化されることにより、検出回路17、ひいては押圧位置検出装置11の製品コストの低減化にも寄与することができる。
(3)また、検出対象13に対する任意の押圧位置が検出可能となることから、本例の押圧位置検出装置11を利用して多方向スイッチ装置を構築することも可能である。
【0056】
(4)励磁信号発生器23は、励磁信号の周波数の4倍のクロック周波数を有している。すなわち、励磁信号発生器23の発振器は、励磁信号の周波数の4倍の周波数を有するクロック信号を生成し、当該クロック信号に基づき設定されるタイミングで第1〜第4の二次コイル15a〜15dをそれぞれ励磁する。すなわち、クロック信号のサンプリングのタイミングをずらすことにより、クロック周波数(40kHz)の1/4の周波数(10kHz)を有する励磁信号、ひいては時間的な位相が互いに90°ずれる4つの励磁信号を簡単に生成可能である。
【0057】
(5)第1〜第4の二次コイル15a〜15dは、同一の設置面である基板12の表面に設けた。そして、検出対象13は、基板12の表面に対する距離を変化させる態様で変位可能に設けられる。具体的には、基板12には、4つの圧縮コイルばね14を介して、検出対象13を支持するようにした。
【0058】
このため、第1〜第4の二次コイル15a〜15dは、検出対象13の押下、すなわち検出対象13に対する基板12へ向けた外力の印加に伴う、当該検出対象13と基板12の表面との間の距離の変化に応じた合成信号を生成する。そして、第1および第2のタイミングT1,T2で取り込まれる第1〜第4の二次コイル15a〜15dの第1および第2の合成信号Vad1,Vad2の値の組み合わせに基づき、検出対象13における押圧位置を検出可能となる。
【0059】
<第2の実施の形態>
つぎに、本発明を検出対象の回転位置を検出する回転位置検出装置に具体化した第2の実施の形態を説明する。当該回転の検出回路は、先の図3に示される前記第1の実施形態の検出回路と同様の構成とされる。
【0060】
図10に示すように、回転位置検出装置31は、特定の回転軸Oを中心として偏心回転する検出対象32の回転位置を検出する。この検出対象32は、鉄などの磁性体により、円柱状あるいは円板状に形成される。そして、検出対象32の外周には、第1〜第4の二次コイル15a〜15dが非接触状態で設けられている。これら第1〜第4の二次コイル15a〜15dは、回転軸Oの回りに90°間隔で設けられている。すなわち、第1〜第4の二次コイル15a〜15dは、それらの設置面として回転軸Oを中心とする仮想円筒面に沿って設けられる。また、第1〜第4の二次コイル15a〜15dの中心線は、それぞれ回転軸Oに交わるように指向している。
【0061】
検出対象32が偏心して回転すると、当該回転位置に応じて、第1〜第4の二次コイル15a〜15dと、検出対象32との間の距離がそれぞれ変化する。これら距離の変化に応じて、第1〜第4の二次コイル15a〜15dを貫く磁束の量が変化する。その結果、第1〜第4の二次コイル15a〜15dに誘起される電圧の大きさも変化する。なお、図10では省略したが、本例においても、第1〜第4の二次コイル15a〜15dのそれぞれに対応して、第1〜第4の一次コイル16a〜16dが設けられる。
【0062】
そして、検出回路17は、前記第1の実施の形態と同様にして、第1〜第4の一次コイル16a〜16dにそれぞれ励磁信号を印加するとともに、検出対象13の回転変位に応じて第1〜第4の二次コイル15a〜15dの直列回路に誘起される電圧に基づき、検出対象32の回転位置を求める。すなわち、第1および第2のタイミングT1,T2においてそれぞれA/D変換器21に取り込まれる第1〜第4の二次コイル15a〜15dの第1および第2の合成信号Vad1,Vad2の組み合わせに基づいて、検出対象13の回転位置が検出される。なお、第1〜第4の二次コイル15a〜15dの合成信号の振幅は、検出対象32と第1〜第4の二次コイル15a〜15dとの距離の変化に応じて、前記第1の実施の形態に準ずるかたちで変化する。このため、単一のA/D変換器21が設けられた検出回路17により、検出対象32の1回転(360°)中の回転位置を検出可能となる。これは、検出対象32が1回転するごとに、第1〜第4の二次コイル15a〜15dに誘起される電圧の波形、ひいてはこれら第1〜第4の二次コイル15a〜15dの合成信号の振幅は、同様に変化するためである。
【0063】
したがって、本実施の形態によれば、以下の効果を得ることができる。
(6)第1〜第4の二次コイル15a〜15dは、同一の設置面である仮想円筒面の中心軸の回りに90°間隔で設けた。そして、検出対象32は、当該仮想円筒面の中心軸と一致する回転軸Oを中心として第1〜第4の二次コイル15a〜15dに非接触状態で、かつ仮想円筒面との距離を変化させる態様で回転可能に設けられる。
【0064】
このため、第1〜第4の二次コイル15a〜15dは、検出対象13の回転軸Oを中心とする回転に伴う、当該検出対象32と仮想円筒面(第1〜第4の二次コイル15a〜15d)との間の距離の変化に応じた合成信号を生成する。そして、前記第1の実施の形態と同様に、第1および第2のタイミングT1,T2で取り込まれる第1〜第4の二次コイル15a〜15dの第1および第2の合成信号Vad1,Vad2の値の組み合わせに基づき、検出対象32の回転位置が検出可能となる。
【0065】
<第3の実施の形態>
つぎに、本発明を検出対象のスライド位置を検出するスライド位置検出装置に具体化した第3の実施の形態を説明する。本例の検出回路は、先の図3に示される前記第1の実施形態の検出回路と同様の構成とされる。
【0066】
本例は、図11に示すように、基板12に対して、検出対象13を平行にスライド移動させる点で前記第1の実施の形態と異なる。検出対象13は、基板12上の第1〜第4の二次コイル15a〜15dに対して一定の距離をおいて、互いに交わる2方向へスライド移動可能に設けられる。
【0067】
検出対象13のスライド移動に伴い、対向する第1〜第4の二次コイル15a〜15dの端面の面積が変化する。このように、検出対象13と第1〜第4の二次コイル15a〜15dとの対向面積の変化に応じて、第1〜第4の二次コイル15a〜15dを貫く磁束の量が変化することにより、第1〜第4の二次コイル15a〜15dに誘起される電圧の大きさも変化する。
【0068】
そして、検出回路17は、前記第1の実施の形態と同様にして、第1〜第4の一次コイル16a〜16dにそれぞれ励磁信号を印加するとともに、検出対象13のスライド変位に応じて第1〜第4の二次コイル15a〜15dの直列回路に誘起される電圧に基づき、検出対象32のスライド位置を求める。すなわち、第1および第2のタイミングT1,T2においてそれぞれ取り込まれる第1〜第4の二次コイル15a〜15dの第1および第2の合成信号Vad1,Vad2の組み合わせに基づいて、検出対象13のスライド位置を検出する。
【0069】
したがって、本実施の形態によれば、単一のA/D変換器21が設けられた検出回路17により、検出対象32のスライド位置を検出可能となる。
<他の実施の形態>
なお、前記実施の形態は、次のように変更して実施してもよい。
【0070】
・第1の実施の形態では、検出対象を矩形板状にしたが、円形、楕円形など他の形状としてもよい。
・第2の実施の形態では、円柱状あるいは円板状の検出対象32を偏心回転させることにより、第1〜第4の二次コイル15a〜15dとの距離を変化させるようにしたが、たとえば検出対象の形状として、いわゆる涙形、あるいは楕円形などの形状を採用してもよい。すなわち、検出対象の回転に応じて、第1〜第4の二次コイル15a〜15dの磁界の変化が発生すればよい。このようにしても、検出対象32の回転を検出可能である。
【0071】
・また、第2の実施の形態では、検出対象32は、第1〜第4の二次コイル15a〜15dが沿って設けられる仮想円筒面の中心軸でもある回転軸Oを中心として偏心回転するようにしたが、仮想円筒面の中心軸(回転軸O)に平行をなす他の軸を中心として偏心回転するようにしてもよい。このようにしても、検出対象32の回転に応じて、第1〜第4の二次コイル15a〜15dの磁界の変化が発生する。
【0072】
・第1〜第3の実施の形態では、第1〜第4の二次コイル15a〜15dを同一の設置面上に設けたが、異なる設置面に設けてもよい。すなわち、検出対象13,32の変位に応じて、第1〜第4の二次コイル15a〜15dの磁界の変化が発生すればよい。
【0073】
・第1〜第3の実施の形態では、検出対象13を磁性体としたが、電気の導体としてもよい。この導体として、たとえば銅などの非磁性体を検出対象13として採用することが可能である。この場合、検出対象13,32が、第1〜第4の二次コイル15a〜15dに対して近接するほど、これら第1〜第4の二次コイル15a〜15dに誘起される電圧の値は小さくなる。逆に、検出対象13,32が、第1〜第4の二次コイル15a〜15dに対して離間するほど、これら第1〜第4の二次コイル15a〜15dに誘起される電圧の値は大きくなる。
【0074】
・第1〜第3の実施の形態において、第1〜第4の一次コイル16a〜16d、ならびに第1〜第4の二次コイル15a〜15dは、それぞれ磁性体により形成されるコア(鉄心)に巻回する態様で設けてもよい。
【0075】
・第1〜第3の実施の形態において、第1〜第4の一次コイル16a〜16d、ならびに第1〜第4の二次コイル15a〜15dは、基板12に金属などの導体がプリントされてなる平面アンテナとしてもよい。このようにすれば、位置検出装置の体格を小さくすることが可能である。
【0076】
・第1〜第3の実施の形態では、第1〜第4の一次コイル16a〜16dに個別に励磁信号を印加することにより、互いに直列に接続される第1〜第4の二次コイル15a〜15dをそれぞれ励磁するようにしたが、つぎのようにしてもよい。すなわち、第1〜第4の二次コイル15a〜15dに対して個別に励磁信号を印加する。このようにすれば、第1〜第4の二次コイル15a〜15dが、それぞれ一次コイルとしても機能するので、第1〜第4の一次コイル16a〜16dが省略可能となる。
【0077】
・第1の実施の形態では押圧位置検出装置として、第2の実施の形態では回転位置検出装置として、第3の実施の形態ではスライド位置検出装置として、本発明を具体化したが、傾斜検出装置として具体化することも可能である。たとえば、第1〜第4の二次コイル15a〜15dをケースに固定的に設けるとともに、磁性体により円柱状あるいは円盤状に形成される検出対象を、自重によりケースに対して相対的に変位可能に設ける。ケースが傾斜したとき、検出対象は、ケース、ひいては第1〜第4の二次コイル15a〜15dに対して相対的に変位する。第1〜第4の二次コイル15a〜15dは、検出対象の変位に応じた出力信号を生成する。この生成される出力信号は、ケースの傾斜に応じたものとなる。このように、検出回路17のA/D変換器21を単一とした場合であれ、第1〜第4の二次コイル15a〜15dに対して相対的に変位することにより、第1〜第4の二次コイル15a〜15dの磁界を変化させる磁性体からなる検出対象の様々な変位を検出可能である。
【0078】
<他の技術的思想>
次に、前記実施の形態から把握できる技術的思想を以下に追記する。
(イ)請求項3に記載の位置検出装置において、前記設置面は円筒面とし、前記各コイルは、前記特定の軸としての前記円筒面の中心軸の回りに90°間隔で設け、前記検出対象は、前記中心軸を中心として、前記円筒面との距離を変化させる態様で回転変位可能に設けられる位置検出装置。この構成によれば、検出対象とコイルの設置面である円筒面との距離に応じた合成信号が得られる。この合成信号に基づき、検出対象の回転位置を検出可能となる。
【符号の説明】
【0079】
11…押圧位置検出装置、12…基板、13,32…検出対象、15a〜15d…第1〜第4の二次コイル、16a〜16d…第1〜第4の一次コイル、21…A/D変換器、22…演算器、23…励磁信号発生器、31…回転位置検出装置、T1…第1のタイミング、T2…第2のタイミング。
【特許請求の範囲】
【請求項1】
特定の軸の回りに90°間隔で設けられ、かつ、互いに直列に接続された状態で、磁性体または導体からなる検出対象に対して相対変位可能に設けられる4つのコイルと、
時間的な位相を互いに90°ずらして各コイルを励磁する励磁信号発生器と、
前記励磁信号発生器を通じて励磁された際に、各コイルに発生するアナログ電圧の和である合成信号を、特定のコイルに発生する電圧が最大になる第1のタイミング、および、前記第1のタイミングにおける前記電圧の位相が時間的に90°ずれる第2のタイミングで取り込む単一のA/D変換器と、
前記A/D変換器により前記第1および第2のタイミングで取り込まれる前記合成信号のデジタル値の組み合わせに基づき、前記検出対象の位置を演算する演算器と、を備えてなる位置検出装置。
【請求項2】
請求項1に記載の位置検出装置において、
前記励磁信号発生器は、励磁周波数の4倍のクロック周波数を有するクロック信号を生成し、当該クロック信号に基づき設定されるタイミングで各コイルを励磁する位置検出装置。
【請求項3】
請求項1または請求2に記載の位置検出装置において、
前記各コイルは、同一の設置面に設け、
前記検出対象は、前記設置面に対する距離を変化させる態様で変位可能に設けられる位置検出装置。
【請求項4】
請求項3に記載の位置検出装置において、
前記設置面は平面とする一方で、当該平面に直交するように前記特定の軸を設定し、
前記検出対象は、前記特定の軸に沿う方向において前記各コイルに対向するとともに、当該特定の軸に沿う方向における前記平面との距離を変化させる態様で変位可能に設けられる位置検出装置。
【請求項5】
請求項1〜請求項3のうちいずれか一項に記載の位置検出装置において、
前記各コイルは、前記特定の軸を中心とする仮想円筒面に沿って設け、
前記検出対象は、前記特定の軸、または当該特定の軸に平行をなす他の軸を中心として回転可能に設けられる位置検出装置。
【請求項1】
特定の軸の回りに90°間隔で設けられ、かつ、互いに直列に接続された状態で、磁性体または導体からなる検出対象に対して相対変位可能に設けられる4つのコイルと、
時間的な位相を互いに90°ずらして各コイルを励磁する励磁信号発生器と、
前記励磁信号発生器を通じて励磁された際に、各コイルに発生するアナログ電圧の和である合成信号を、特定のコイルに発生する電圧が最大になる第1のタイミング、および、前記第1のタイミングにおける前記電圧の位相が時間的に90°ずれる第2のタイミングで取り込む単一のA/D変換器と、
前記A/D変換器により前記第1および第2のタイミングで取り込まれる前記合成信号のデジタル値の組み合わせに基づき、前記検出対象の位置を演算する演算器と、を備えてなる位置検出装置。
【請求項2】
請求項1に記載の位置検出装置において、
前記励磁信号発生器は、励磁周波数の4倍のクロック周波数を有するクロック信号を生成し、当該クロック信号に基づき設定されるタイミングで各コイルを励磁する位置検出装置。
【請求項3】
請求項1または請求2に記載の位置検出装置において、
前記各コイルは、同一の設置面に設け、
前記検出対象は、前記設置面に対する距離を変化させる態様で変位可能に設けられる位置検出装置。
【請求項4】
請求項3に記載の位置検出装置において、
前記設置面は平面とする一方で、当該平面に直交するように前記特定の軸を設定し、
前記検出対象は、前記特定の軸に沿う方向において前記各コイルに対向するとともに、当該特定の軸に沿う方向における前記平面との距離を変化させる態様で変位可能に設けられる位置検出装置。
【請求項5】
請求項1〜請求項3のうちいずれか一項に記載の位置検出装置において、
前記各コイルは、前記特定の軸を中心とする仮想円筒面に沿って設け、
前記検出対象は、前記特定の軸、または当該特定の軸に平行をなす他の軸を中心として回転可能に設けられる位置検出装置。
【図1】


【図2】

【図3】

【図4】
【図5】
【図6】
【図7】
【図8】

【図9】
【図10】

【図11】
【図12】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【公開番号】特開2012−220375(P2012−220375A)
【公開日】平成24年11月12日(2012.11.12)
【国際特許分類】
【出願番号】特願2011−87459(P2011−87459)
【出願日】平成23年4月11日(2011.4.11)
【出願人】(000003551)株式会社東海理化電機製作所 (3,198)
【Fターム(参考)】
【公開日】平成24年11月12日(2012.11.12)
【国際特許分類】
【出願日】平成23年4月11日(2011.4.11)
【出願人】(000003551)株式会社東海理化電機製作所 (3,198)
【Fターム(参考)】
[ Back to top ]