
光断層像撮像方法、光断層像撮像装置およびプログラム
【課題】 アライメントから測定終了までの間に画像を劣化させる要因が発生した場合でも良好な被検眼の断層像を得る。
【解決手段】 被検眼の第1の断層像を取得する第1取得手段と、第1の断層像が取得された後に被検眼の3次元像を取得する3次元像取得手段と、3次元像が取得された後に第1の断層画像に対応する被検眼の第2の断層像を取得する第2取得手段と、第1の断層像の階調に基づいて第2の断層像の階調を補正する補正手段と、を備える。
【解決手段】 被検眼の第1の断層像を取得する第1取得手段と、第1の断層像が取得された後に被検眼の3次元像を取得する3次元像取得手段と、3次元像が取得された後に第1の断層画像に対応する被検眼の第2の断層像を取得する第2取得手段と、第1の断層像の階調に基づいて第2の断層像の階調を補正する補正手段と、を備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、眼科装置および眼科用画像処理方法に関する。
【背景技術】
【0002】
現在、光学機器を用いた眼科用機器として、様々なものが使用されている。例えば、前眼部撮像機、眼底カメラ、共焦点レーザー走査検眼鏡(SLO:Scanning Laser Ophthalmoscope)等である。中でも、低コヒーレンス光を利用した光コヒーレンストモグラフィ(OCT:Optical Coherence Tomography)による光断層像撮像装置は、被検眼の断層像を高解像度で得ることができる装置であり、眼科用機器として網膜の専門外来では必要不可欠な装置になりつつある。以下、これをOCT装置と記す。
特許文献1では、眼底カメラが装備されたOCT装置が開示されている。眼底カメラによって被検眼と装置のアライメント状態、フォーカス状態などの適否を判定する。また、予備的に取得された断層像の適否、被検眼のトラッキング状態の適否をそれぞれ判定することができる。これらにより、計測タイミングを逃すことなく容易に計測ができるとしている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2010−181172
【発明の概要】
【発明が解決しようとする課題】
【0004】
OCT測定において、装置と被検眼のアライメントやフォーカスが重要なことは言うまでもない。しかし、このような調整をしたあとでも、断層像の撮像に失敗することがある。その原因としてまぶたやまつ毛による測定光の妨害、眼の移動が挙げられる。例えば、広画角に3D測定を行う場合、測定光の入射位置がまぶたやまつ毛に近い撮像領域の断層像で、まぶたやまつ毛による断層像の劣化が見られる。また、測定中に瞬きや固視不良が発生する場合もある。
本発明は、アライメントから測定終了までの間に画像を劣化させる要因が発生した場合でも良好な被検眼の断層像を得ることを目的とする。
なお、前記目的に限らず、後述する発明を実施するための形態に示す各構成により導かれる作用効果であって、従来の技術によっては得られない作用効果を奏することも本件の他の目的の1つとして位置付けることができる。
【課題を解決するための手段】
【0005】
本眼科装置は、被検眼の第1の断層像を取得する第1取得手段と、前記第1の断層像が取得された後に前記被検眼の3次元像を取得する3次元像取得手段と、前記3次元像が取得された後に前記第1の断層画像に対応する前記被検眼の第2の断層像を取得する第2取得手段と、前記第1の断層像の階調に基づいて前記第2の断層像の階調を補正する補正手段と、を備えることを特徴とする眼科装置。
【0006】
また、本眼科装置は、被検眼の第1の断層像を取得する第1取得手段と、前記第1の断層像が取得された後に前記被検眼の3次元像を取得する3次元像取得手段と、前記3次元像が取得された後に前記第1の断層画像に対応する前記被検眼の第2の断層像を取得する第2取得手段と、前記第1の断層像に基づいて前記第2の断層像の倍率を補正する補正手段と、を備える。
【0007】
さらに、本眼科用画像処理方法は、被検眼の第1の断層像を取得する第1取得工程と、前記第1の断層像が取得された後に前記被検眼の3次元像を取得する3次元像取得工程と、前記3次元像が取得された後に前記第1の断層画像に対応する前記被検眼の第2の断層像を取得する第2取得工程と、前記第1の断層像の階調に基づいて前記第2の断層像の階調を補正する補正工程と、を有する。
【0008】
また、本プログラムは、上記眼科用画像処理方法をコンピュータに実行させる。
【発明の効果】
【0009】
本発明によれば、アライメントから測定終了までの間に画像を劣化させる要因が発生した場合でも良好な被検眼の断層像を得ることができる。
【図面の簡単な説明】
【0010】
【図1】実施例1のOCT装置の構成の一例を模式的に示す図である。
【図2】コンピュータの機能構成の一例を模式的に示す図である。
【図3】実施例1の信号処理を示すフローチャートである。
【図4】(a)〜(d)は実施例1のアライメント時の断層像の一例を示す図である。
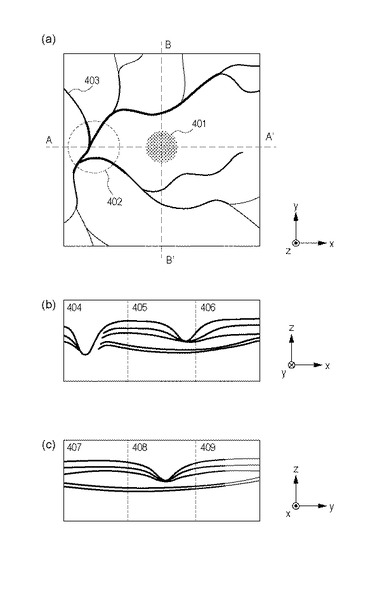
【図5】(a)〜(c)は実施例1の測定後の眼底像および断層像の一例を示す図である。
【図6】実施例2のOCT装置の構成の一例を模式的に示す説明図である。
【図7】実施例2の走査範囲の一例を説明するための図である。
【図8】(a)〜(d)は実施例2のアライメント時の断層像の一例を示す図である。
【発明を実施するための形態】
【0011】
以下、本発明の一実施例について、図面を用いて詳細に説明する。なお、本発明は以下に示す実施例に限定されるものではなく、本実施例の趣旨を逸脱しない範囲で種々変形して実施することができる。
【0012】
[実施例1]
図1は、実施例1におけるOCT装置の構成の一例を模式的に示す図である。
【0013】
(光学系)
OCT装置は、マイケルソン干渉系で構成されている。光源101の出射光102はシングルモードファイバ107に導かれて光カプラ108に入射し、光カプラ108にて参照光103と測定光104とに分割される。そして測定光104は、観察対像の網膜120によって反射あるいは散乱され、戻り光105となって光カプラ108に戻る。そして光カプラ108によって、参照光路を経由してきた参照光103と合波され合波光106となり、分光器116に到達する。
【0014】
光源101は代表的な低コヒーレント光源であるSLD光源(Super Luminescent Diode)である。波長は眼を測定することを鑑みると、近赤外光が適する。さらに波長は、得られる断層像の横方向の分解能に影響するため、なるべく短波長であることが望ましく、ここでは例えば中心波長840nm、波長幅50nmとする。当然観察対象の測定部位によっては、他の波長を選んでも良い。なお光源の種類は、ここではSLD光源を選択したが、低コヒーレント光が出射できればよく、ASE光源(Amplified Spontaneous Emission)等も用いることができる。
【0015】
次に、参照光103の参照光路について説明する。光カプラ108によって分割された参照光103は、レンズ109−1にて略平行光となって出射される。その後参照光103は分散補償用ガラス110を通過してミラー111にて方向を変える。そして再び光カプラ108を介して分光器116に導かれる。なお、分散補償用ガラス110は被検眼119および走査光学系を測定光104が往復した時の分散を、参照光103に対して補償するものである。ここでは、一例として日本人の平均的な眼球の直径として代表的な値を想定し24mmとする。参照光の光路長は電動ステージ112で矢印の方向に移動することによってコヒーレンスゲートの位置を調整することができる。コヒーレンスゲートとは、測定光路における参照光路と等距離になる位置のことである。電動ステージ112の制御はコンピュータ117によって行われる。
【0016】
次に、測定光104の測定光路について説明する。光カプラ108によって分割された測定光104は、レンズ109−2にて、略平行光となって出射され、走査光学系を構成するXYスキャナ113のミラーに入射される。図1においては簡単のためXYスキャナ113は一つのミラーとしているが、実際にはXスキャン用ミラーとYスキャン用ミラーとの2枚のミラーが近接して配置されている。ここで、Z軸方向を測定光の光軸方向とし、Z軸に垂直で紙面に水平な方向をX軸方向、Z軸に垂直で紙面に垂直な方向をY軸方向とする。
【0017】
測定光はレンズ114、対物レンズ115を介して被検眼119に到達し角膜118の付近を支点として網膜120をスキャンする。網膜120で反射、散乱された光は対物レンズ115、レンズ114、XYスキャナ113、レンズ109−2を通り、ファイバに戻る。そして、光カプラ108を介して、参照光103と合波され分光器116に到達する。
【0018】
分光器116に到達した合波光106は、回折格子により波長毎に分割され、図示しないセンサにより波長毎の強度が検出される。そして、コンピュータ117によってフーリエ変換等が行われて断層像が生成され、コンピュータ117の記憶部に記憶されると共に必要に応じて図示しない表示部に表示される。
【0019】
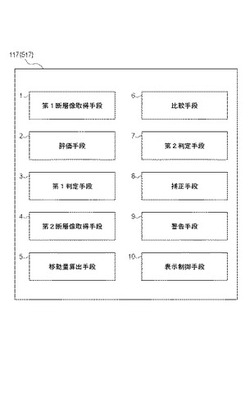
図2はコンピュータ117の機能構成の一例を模式的に示す図である。
【0020】
コンピュータ117はCPU(Central Processing Unit)等の処理装置を備え、図示しないメモリ等の記憶装置に記憶されたプログラムを実行することで、以下に述べる各種の機能を実現する。
【0021】
コンピュータ117は第1断層像取得手段1,評価手段2,第1判定手段3,第2断層像取得手段4,移動量算出手段5,比較手段6,第2判定手段7,補正手段8,警告手段9および表示制御手段10として機能する。
【0022】
第1断層像取得手段1は、被検眼に対する図1に示す眼科装置のアライメント時に、センサにより検出された波長毎の強度に基づいて被検眼の断層像(第1の断層像)を取得する。すなわち、第1断層像取得手段1は被検眼の第1の断層像を取得する第1取得手段の一例に相当する。具体的には、第1断層像取得手段1は、XYスキャナ113のY方向を固定した状態でX方向に走査させることでX方向の断層像を取得する。また、第1断層像取得手段1は、XYスキャナ113のX方向を固定した状態でY方向に走査させることでY方向の断層像を取得する。第1断層像取得手段1は上記の処理を交互に連続的に実行することによって、X方向の断層像とY方向の断層像の2枚の断層像を得る。なお、第1断層像取得手段1は必ずしも2枚の断層像を取得する必要はなく、例えば、Y方向の断層像のみを取得することとしてもよい。なお、第1断層像取得手段1は、センサにより検出された波長毎の強度に基づいて他のコンピュータで生成された断層像を無線または有線を介して取得することとしてもよい。
【0023】
評価手段2は、第1断層像取得手段1によって取得された断層像の評価を行う。具体的には評価手段2は第1断層像取得手段1によって取得された断層像を複数の領域に分割して各領域における断層像のヒストグラムを求める。例えば、評価手段2は断層像を3つの領域に分割し、各領域でのヒストグラムを求める。ここで、乳頭が含まれる領域と黄班が含まれる領域と乳頭および黄班が含まれない領域とではそれぞれヒストグラムが異なる。
【0024】
なお、分割する領域の数は適宜変更可能であり3つに限定されるものではない。また、評価手段2は分割した各領域のヒストグラムを求めることに限定されるものではなく、例えば、領域が3つに分割されている場合には並んだ3つの領域のうち真ん中の領域以外の領域のヒストグラムを求めることとしてもよい。
【0025】
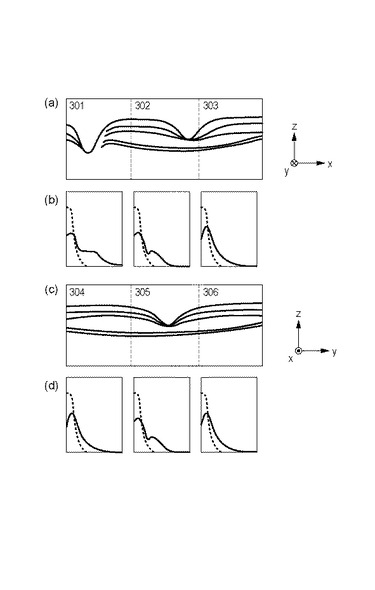
図4(a)はX方向の断層像の一例であり、図4(b)はX方向の断層像の各領域301−303におけるヒストグラムの一例を示す図である。また、図4(c)はY方向の断層像の一例であり、図4(d)はY方向の断層像の各領域304−306におけるヒストグラムの一例を示す図である。
【0026】
第1判定手段3は評価手段2による評価に基づいてアライメントの状態(アライメントが完了しているか否か)を判定する。具体的には、第1判定手段3は評価手段2によって求められたヒストグラムに基づいてアライメントの状態を判定する。例えば、左眼の黄班を略中心として撮影している場合には、第1判定手段3は図4(a)に示す領域301から領域303のヒストグラムを引き算し、高輝度領域で正になっている場合が所定の閾値以上か否かを判断する。領域301には視神経乳頭が含まれているため、領域301のヒストグラムは領域303のヒストグラムに比べて高輝度側での頻度が高くなる。すなわち、領域301のヒストグラムから領域303のヒストグラムを引き算することで視神経乳頭に対応する輝度を示すヒストグラムが得られることになる。言い換えれば、第1判定手段3は領域301から領域303のヒストグラムを引き算し、視神経乳頭に対応する輝度領域が正になっている場合が所定の閾値以上か否かを判断する。ここで、所定の閾値とは例えば80%であるが、他の値とすることも可能である。
【0027】
また、右眼を撮影している場合も、左眼の場合と同様に視神経乳頭を含む領域から視神経乳頭を含まない領域を引き算することで視神経乳頭に対応する輝度領域が正になっている場合が所定の閾値以上か否かを判断する。
【0028】
さらに、第1判定手段3は、例えば、図4(c)に示す領域304と領域306で引き算をして、この差が所定の閾値以内か否かを判定する。このアライメントの判定方法は、黄班および視神経乳頭を通る直線を対象に被検眼の構造は似ていることを利用したものである。また、所定の閾値とは例えば、領域304と領域306との頻度(画素)の差が1の領域における画素の5%である場合を指す。但し、所定の閾値はこれに限定されるものではなく、任意に変更することが可能である。
【0029】
第1判定手段3は、X方向の断層像において視神経乳頭に対応する輝度領域が正になっている場合が所定の閾値以上であり、Y方向の断層像において黄班を含む領域に隣接する領域のヒストグラムの差が所定の閾値以内である場合にはアライメントが成功したものと判定する。すなわち、第1判定手段3はアライメント中に取得した第1の断層像に基づいてアライメントの状態を判定する。具体的には第1判定手段3は第1の断層像のヒストグラムに基づいてアライメントの状態を判定する。より具体的には第1判定手段3は複数の領域に分けられた第1の断層像の少なくとも2以上の領域におけるヒストグラムに基づいてアライメントの状態を判定する。また、第1判定手段3は、第1の断層像の中心を含む領域に隣接する2つの領域における第1の断層像のヒストグラムの差に基づいてアライメントの状態を判定する。
【0030】
第2断層像取得手段4は、被検眼の3次元像を取得し、第1断層像取得手段1が取得した断層像に対応する位置の断層像(第2の断層像)を例えば3次元像から取得する。すなわち、第2断層像取得手段4は第1の断層像が取得された後に被検眼の3次元像を取得する3次元像取得手段の一例に相当する。また、第2断層像取得手段4は、3次元像が取得された後に第1の断層画像に対応する被検眼の第2の断層像を取得する第2取得手段の一例に相当する。
【0031】
なお、第2断層像取得手段4は3次元像から断層像を取得することに限定されるものではなく、3次元像を構成する二次元断層像を取得する場合もある。また3次元像とは複数の断層像から構成され、複数の断層像間が補間されている場合も補間されていない場合も含む。
【0032】
第2断層像取得手段4は、アライメント時にスキャンした位置に対応するX方向の断層像およびY方向の断層像を例えば3次元像から取得する。すなわち、第2の断層像は被検眼における第1の断層像の位置に対応する。図5(b)は第2断層像取得手段4が取得したX方向の断層像を示し、図5(c)は第2断層像取得手段4が取得したY方向の断層像を示している。なお、第2断層像取得手段4は、3次元像に基づいて他のコンピュータで生成された断層像を無線または有線を介して取得することとしてもよい。また、第1断層像取得手段1が取得した断層像の被検眼における位置情報を記憶しておき、第2断層像取得手段4はこの位置情報に基づいて断層像を取得することとしてもよい。なお、第1断層像取得手段1が黄班を中心として断層像を取得した場合、第2断層像取得部4は眼底像から黄班を検出した後に黄班を中心として断層像を取得することとしてもよい。
【0033】
移動量算出手段5は、被検眼の移動量を算出する。具体的には、移動量算出手段5は、図4(a),(b)および図5(b),(c)を用いて移動量を算出する。移動量の算出は、図4(a)とマッチングする範囲が図5(b)のどこに相当するかを検索することにより行われる。
【0034】
まず、移動量算出手段5は、眼が測定前後で移動したか、測定中にどれだけ移動したかを判断する。測定前後の眼の移動は、図4(a)とマッチングする範囲が図5(b)のどこに相当するかを検索することにより算出する。また、移動量算出手段5は、測定中のZ軸方向への移動については特にY方向がスロースキャンなので、Y方向に対して縮んだり、伸びたりした画像であるかを、断層像の倍率から計測する。
【0035】
比較手段6は、第1断層像取得手段1によって取得された断層像と第2断層像取得手段4によって取得された断層像とを比較する。より具体的には、移動量算出手段によって算出された移動量に基づいて第2断層像取得手段4によって取得された断層像の位置および倍率を補正することで、対応する場所同士のヒストグラムを比較する。
【0036】
第2判定手段7は、比較手段6の比較結果に基づいて被検眼の3次元像の測定状態(測定が成功しているか否か)を判定する。具体的には第2判定手段7は、第1断層像取得手段1によって取得された断層像と第2断層像取得手段4によって取得された断層像との位置、倍率、ヒストグラムの差がそれぞれ閾値未満であれば、測定に成功したと判定する。例えば、第1断層像取得手段1によって取得された断層像と第2断層像取得手段4によって取得された断層像との位置の差により生じた異なる部分が断層像全体の10%以下の場合の場合には第2判定手段7は測定に成功したと判定する。なお、測定に成功したと判定する場合を10%以下の場合としたが、これに限定されるものではなく種々の値に変更可能である。
【0037】
また、第1断層像取得手段1によって取得された断層像と第2断層像取得手段4によって取得された断層像との倍率の差が2%以下の場合には第2判定手段7は測定に成功したと判定する。なお、測定に成功したと判定する場合を2%以下の場合としたが、これに限定されるものではなく種々の値に変更可能である。
【0038】
さらに、第1断層像取得手段1によって取得された断層像と第2断層像取得手段4によって取得された断層像とのヒストグラムの差が10%以下である場合には第2判定手段7は測定に成功したと判定する。なお、ヒストグラムの差とは、各領域における第1断層像取得手段1によって取得された断層像のヒストグラムと第2断層像取得手段4によって取得された断層像のヒストグラムとの異なる部分の画素数の1の領域における全体の画素数に対する割合である。また、測定に成功したと判定する場合を10%以下の場合としたが、これに限定されるものではなく種々の値に変更可能である。
【0039】
また、第2判定手段7はヒストグラムの差が10%より大きい場合には、各領域のヒストグラムのうちノイズレベルに含まれている割合を取得して、画像の補正が可能か否かを判定する。ここで、ノイズレベルとは予め取得した被検査物が何もない時のデータである。第2判定手段7は例えば、各領域のヒストグラムのうちノイズレベルに含まれている割合が80%以上の場合には画像の補正ができないと判定する。なお、画像の補正ができないと判定する場合を80%以上の場合としたが、これに限定されるものではなく種々の値に変更可能である。
【0040】
すなわち、第2判定手段7は第1の断層像と前記第2の断層像とに基づいて、3次元像の測定状態を判定する。具体的には、第2判定手段7は、第1の断層像のヒストグラムと第2の断層像のヒストグラムとに基づいて3次元像の測定状態を判定する。
【0041】
補正手段8は、第2断層像取得手段4によって取得された断層像のヒストグラム(階調)を第1断層像取得手段1によって取得された断層像のヒストグラム(階調)に等しくなるように補正する。すなわち、補正手段8は、第2断層像取得手段4によって取得された断層像のヒストグラムと第1断層像取得手段1によって取得された断層像のヒストグラムとの差をなくすように第1断層像取得手段1によって取得された断層像の階調を補正する。補正手段8は例えばγ補正を用いるが、これに限定されるものではなく他の方法を用いてヒストグラムを補正することとしてもよい。このヒストグラムを補正する処理をX方向の断層像およびY方向の断層像に対して行う。すなわち、補正手段8は第1の断層像の階調に基づいて第2の断層像の階調を補正する補正手段の一例に相当する。より具体的には、第2断層像取得手段4は、第2の断層像のヒストグラムと第1の断層像のヒストグラムとの差に基づいて第2の断層像の階調を補正する。
【0042】
本実施例では図5(b),(c)に示すように、X方向の断層像およびY方向の断層像のそれぞれは3つの領域に分割されているので、ヒストグラムの補正はそれぞれの断層像の3箇所で行われる。従って、XY平面上において9箇所に分割された2次元のγ分布が得られる。補正手段8は、これに基づいて3次元像に対してヒストグラムの補正(γ補正)行う。すなわち、補正手段8は、第1の断層像のヒストグラムと前2の断層像のヒストグラムとの差に基づいて3次元像の階調を補正する補正手段の一例に相当する。
【0043】
また、補正手段8は第2断層像取得手段4によって取得された断層像の倍率を第1断層像取得手段1によって取得された断層像の倍率に等しくなるように補正する。すなわち、補正手段8は第1の断層像に基づいて第2の断層像の倍率を補正する補正手段の一例に相当する。なお、補正手段8は倍率の補正により不足するデータはノイズレベルのデータを入れ、過剰になる場合はデータを削除する。同様に補正手段8は、3次元像に対して倍率の補正を行う。
【0044】
警告手段9は、第1判定手段3によってアライメントが成功していないと判定された場合に警告を行う。警告の形態としてはブザー等の音による警告であってもよいし、警告を示す表示形態を後述する表示制御手段10によって表示部に表示させることとしてもよい。警告を示す表示形態としては「アライメント確認」,「アライメント中」等のアライメントが成功していない旨を示す文字を表示することとしてもよいし、「×」等の図によりアライメントが成功していない旨を示すこととしてもよい。
【0045】
また、警告手段9は、第2判定手段7によって三次元像の測定が成功していないと判定された場合に警告を行う。警告の形態としてはブザー等の音による警告であってもよいし、警告を示す表示形態を後述する表示制御手段10によって表示させることとしてもよい。警告を示す表示形態としては「要再測定」,「測定失敗」等の3次元像の測定が成功していない旨を示す文字を表示することとしてもよいし、「×」等の図により3次元像の測定が成功していない旨を示すこととしてもよい。なお、例えばエラーの要因ごとに位置または倍率であれば「固視不良」、ヒストグラムであれば「光遮断」、ノイズレベルであれば「感度不足」などと警告手段9は表示制御手段10に表示させてもよい。すなわち、警告手段9は第1判定手段によるアライメントの状態の判定結果に基づいて警告を行う。また、警告手段9は第2判定手段による3次元像の測定状態の判定結果に基づいて、警告を行う。
【0046】
表示制御手段10は、各種の情報を表示部に表示させる。例えば、断層像や警告手段9から表示部に表示するように指示された警告等を表示部に表示させる。すなわち、表示制御手段10は第1判定手段3によるアライメントの状態の判定結果に基づいて、警告を示す表示形態を表示部に表示させる。また、表示制御手段10は、第2判定手段による3次元像の測定状態の判定結果に基づいて、警告を示す表示形態を表示部に表示させる。
【0047】
(信号処理)
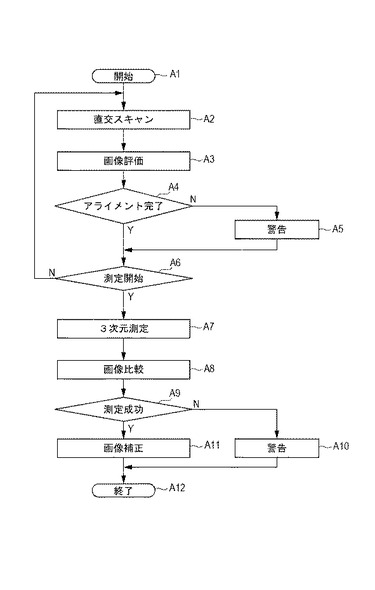
ここで、OCT測定の信号処理(眼科用画像処理方法)について図3を用いて説明する。
【0048】
A1工程で、測定を開始する。この状態はOCT装置が起動されていて、被検眼が測定位置に配置されている。
【0049】
A2〜A6工程を繰り返すことで、本撮像前に装置と被検眼のアライメントを行う。A2工程(第1取得工程)では、第1断層像取得手段1によって断層像(プレスキャン像)を取得する。具体的には、第1断層像取得手段1は、XYスキャナ113のY方向を固定した状態でX方向に走査させ、X方向を固定した状態でY方向に走査させる処理を交互に連続的に行うことによって、X方向の断層像とY方向の断層像の2枚の断層像を得る。A2〜A6工程のループを一周するごとにX方向またはY方向の断層像を撮像する。ここで、図4にA2工程において取得した断層像の模式図を示す。それぞれ図4(a)はX方向、図4(c)はY方向の断層像である。
【0050】
図4(b)、(d)はA3工程で説明するヒストグラムである。図4(a)と(c)の断層像は、X方向とY方向の断層像としてそれぞれ表示部の画面の一部に例えば上下に並べて表示する。そして、ループを周る毎に順次更新しながら断層像を表示し、さらに図示しない記憶部への上書き保存を繰り返す。ここでは例えば、図4(a)が直前に撮像された断層像、図4(c)がその前に撮像された断層像とする。なお、断層像は眼底の10mmの幅の範囲を撮像するものとして、X方向には1024ライン、Y方向には1024ラインのデータを取得する。X方向またはY方向の撮像が終わればA3工程に進む。
【0051】
A3工程で、評価手段2はA2工程で取得した断層像の評価を行う。画像の評価としてここではヒストグラムを利用する。このため、評価手段2は断層像のヒストグラムを求める。図4(b)は図4(a)における3つの領域のヒストグラムで、左から領域301−303に対応する。当然3つの領域である必要はなく、それより多くても少なくてもよい。ヒストグラムの横軸がグレースケール(輝度)、縦軸が頻度(画素数)である。それぞれにおける実線がその領域のヒストグラムである。それぞれの領域におけるヒストグラムに点線で示してあるのは対象物がないときに発生するノイズのヒストグラムである。つまり撮像対象物がない時は、画素がグレースケールの低いところに局在した分布になる。このデータはあらかじめ被検眼の測定前などに、測定位置に何も設置しない状態(開放状態)で撮像することで取得しておく。図4(c)はY方向にスキャンした時の断層像、図4(d)は図4(c)における3つの領域のヒストグラムを模式的に示したものである。左から領域304−306のヒストグラムに対応する。
【0052】
画像の評価について、図4(b)および(d)のヒストグラムを用いて説明する。領域301は乳頭があり、比較的高反射なため、画素がグレースケールの高い位置まで分布している。領域302は、黄斑が含まれ、例えばヒストグラムに2つのこぶがある。領域303は、黄斑を挟んで乳頭の反対側の位置で高反射部分がそれほど多くなく、グレースケールの中心から低い位置の分布となっている。領域304および領域306は黄斑をはさんでそれぞれ対向する位置にあるが、乳頭がどちらにもないので領域303とほぼ同じような分布となる。領域305は黄斑が含まれるので302と同じような分布となる。画像評価が終わればA4工程に進む。
【0053】
A4工程で、第1判定部3によってアライメントが成功しているかどうかの判定を行う。右左眼、乳頭、黄斑など測定部位、測定領域の大きさ等の測定モードに基づいた撮像領域の分割数、各領域に含まれる部位の種別等を考慮して、第1判定部3はあらかじめ設定された閾値を用いて判定を行う。なお、第1判定部3は、断層画像から層構造を認識し予め登録された形状と比較することにより、各領域に含まれる部位の種別を判断しても良い。本例では、左眼を撮像しているとして例えば次のようになる。第1判定部3は領域301から領域303のヒストグラムを引き算し、高輝度領域で正になっている場合が多いかを判断する。加えて領域304と領域306で引き算をし、第1判定部3は正負が略同等であり、所定の閾値以内か否かを判断する。アライメントに成功していると判断すれば、A6工程に進む。アライメントに失敗していると判断すればA5工程に進む。
【0054】
A5工程で、警告手段9は警告を行う。A4工程で、閾値より外れている場合には、「アライメント確認」などと表示制御部10に表示部に表示する。警告を表示するとA6工程に進む。警告は一定時間表示される。ユーザは、警告表示がないことを確認して、コンピュータ117に設けられた測定スイッチを押すことになる。
【0055】
A6工程で、コンピュータ117は図示しない測定スイッチが押されたかどうかを判断する。測定スイッチが押されている場合はA7工程に進み、押されていない場合はA2工程でアライメントを行う。
【0056】
A7工程で、第2断層像取得手段4は3次元測定を行う(3次元像取得工程)。X方向に1024画素の断層像をY方向の1024箇所にて分光器のデータを取得する。ここでは、X方向にファストスキャン、Y方向にスロースキャンを行う。X方向に一往復するごとに分光器からのデータを保存していく。例えば分光器は2048画素とすると、一往復で1024×2048の配列を取得する。スキャンが終了して、すべてのデータが保存されると1024×1024×2048の3次元配列となる。X方向に一往復して取得した断層像(B−Scan)毎に処理をする。断層像は、分光器からのデータにノイズ除去、波長波数変換、フーリエ変換などを施すことで得られる。例えば断層像の深さ方向のデータとしては500画素を切り出して用いる。その結果、3次元のデータ(3次元像)として1024×1024×500の3次元配列を得る。図5は、3次元測定の断層像である。図5(a)は、分光器からのデータを積分して得た2次元像である。2次元像には黄斑401、乳頭402、血管403などがある。図5(b)は2次元像におけるA−A’断面で、アライメント時にXスキャンをした位置に相当する。図5(c)は、2次元像におけるB−B’断面で、アライメント時にYスキャンをした位置に相当する。第2断層像取得手段4は3次元像から図5(b),(c)に示すような断層像を取得する(第2取得工程)。この処理が終了するとA8工程に進む。
【0057】
A8工程で比較手段6は画像比較を行う。比較手段6は例えばA7工程で取得した断層像と測定スイッチが押される直前にA2工程で取得した最新の断層像とを比較する。ここでは、簡単のため測定中に光軸に対して垂直な面内でのみ眼が移動したものとする。つまり、光軸方向と垂直な面内であれば、結像する位置、走査範囲は変わらないことになる。もちろん、まぶたやまつ毛に光を遮られると画像は暗くなる。なお、光軸に対して回転、光軸方向に移動がある場合は、アライメント時に測定したと思われる位置のデータに最も近いデータを3Dデータの中から検索する。このようにして、第2断層像取得手段4はアライメント時の画像と対比できるデータを取得する。
【0058】
画像の比較は、図4(a)と図5(b)、図4(c)と図5(c)を用いて行う。まず、移動量算出手段5が測定前後で眼が移動したか、測定中にどれだけ移動したかを判断する。測定前後の眼の移動量は、図4(a)とマッチングする範囲が図5(b)のどこに相当するかを検索することにより算出する。測定中の被検眼のZ軸方向への移動量は、特にY方向がスロースキャンなので、Y方向に対して縮んだり、伸びたりした画像であるかを、倍率から計測する。次に、ヒストグラムの比較を行う。それは、図4(a)と図5(b)、図4(c)と図5(c)のヒストグラムを用いて行う。ここでは簡単のため移動がないとしているので、比較手段6は、領域301−306のヒストグラムから対応する領域404−409のヒストグラムを引き算する。ここでは、図5(c)における領域407、408、409と右に行くほどコントラストが薄くなっているのでヒストグラムの分布に差が発生する。また、眼の移動がある場合は、比較手段6は、位置、倍率を補正して、対応する場所同士のヒストグラムを比較することなる。当然、移動により比較できるところがない場合は、そのデータを除外する。また、アライメント時の断層像と測定後の断層像の画素数が異なれば、適宜補間を行うことにより画素数を一致させる。画像比較が終わればA9工程に進む。
【0059】
A9工程で第2判定手段7は3次元像の測定の成否の判定を行う。例えば、第2判定手段7は位置、倍率、ヒストグラムの差が閾値より大きければ、測定に失敗したと判断をする。閾値の例としては次のようになる。位置であれば10%以内、倍率であれば2%以内、ヒストグラムであれば10%以内である。また、ヒストグラムの差が10%以上である場合は、さらに第2判定手段7は断層像のヒストグラムを断層像のノイズレベルに対して比較をする。断層像のノイズレベルとは予め取得した、被検査物が何もない時のデータである。特に、ノイズレベルの領域に80%のデータが入っている場合は、画像の修正ができなくなる可能性がある。測定が成功であればA11工程に進む。測定が失敗であればA10工程に進む。
【0060】
A10工程で警告手段9は警告を出す。警告は、「要再測定」などと表示部に表示する。当然細かく分類して、エラーの要因ごとに、位置または倍率であれば「固視不良」、ヒストグラムであれば「光遮断」、ノイズレベルであれば「感度不足」などと表示してもよい。表示したのちA12工程に進む。
【0061】
A11工程(補正工程)で補正手段8は画像補正を行う。判定の閾値以内であっても必要に応じて、倍率やヒストグラムを補正する。倍率の補正により不足するデータはノイズレベルのデータを入れ、過剰になる場合はデータを削除する。ヒストグラムの補正は、一般的な方法で良く、例えばγ補正を用いる。γ補正では、それぞれの領域において、γ補正によるヒストグラムがアライメント時の領域のヒストグラムに近づくように行う。これをX方向およびY方向のデータにて行う。ここでのγ補正を行う箇所は、X方向の断層像およびY方向の断層像のそれぞれにおいて3か所ずつであるが、直線補間などを用いることによって、各画素で2次元のγ分布が得られる。補正手段8はこれに基づきそれぞれのXY座標においてγ補正を行い、最終的な3次元データを得ることができる。
【0062】
A12工程で、終了する。ここでは、1回の撮像ルーチンの終了である。「再計測」と表示された場合、その他の測定を行う場合など、必要に応じてA1工程から再計測を行う。
【0063】
以上説明のように本実施例によれば、アライメントから測定終了までの間に画像を劣化させる要因が発生した場合でも良好な被検眼の断層像を得ることができる。
【0064】
また、本実施例によれば、アライメント時の断層像と測定後の断層像を評価し、瞬き、まつげ、眼の移動などにより断層像の取得の失敗を検出することができ、さらに、アライメントの再実施、断層像の再取得の処理等の適切な処理を促すことができる。
【0065】
なお、本実施例においては、直交する2つの断層像を取得して評価を行ったが、3次元測定時の主走査方向に交差する1つの断層像を取得した処理であれば、瞬き、まつ毛等による断層像の取得の失敗を判断することができる。
【0066】
[実施例2]
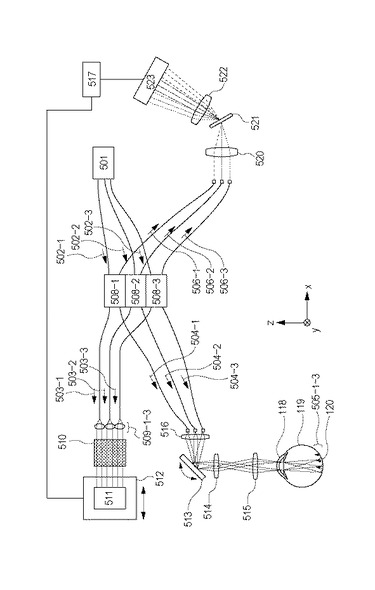
図6は、実施例2におけるOCT装置の構成の一例を模式的に示す構成を示す図である。
【0067】
本実施例では3本の測定光を有するOCT装置の実施例を示す。なお、測定光の数はこれに限定されるものではなく、種々の値に変更可能であり測定光が複数であればよい。
【0068】
(光学系)
光源501から出射した光である出射光は、第1の光路と第2の光路と第3の光路の3つの光路を通る出射光502−1〜3に分割される。さらに、この3つの出射光502−1〜3のそれぞれは、光カプラ508−1〜3にて参照光503−1〜3と測定光504−1〜3とに分割される。このように分割された3つの測定光504−1〜3は、観察対象である被検眼119における網膜120等のそれぞれの測定箇所によって反射あるいは散乱され、戻り光505−1〜3となって戻される。そして、光カプラ508−1〜3によって、参照光路を経由してきた参照光503−1〜3と合波され合波光506−1〜3となる。合波光506−1〜3は、透過型回折格子521によって波長毎にそれぞれ分光され、ラインセンサ523の異なる領域に入射される。ラインセンサ523からの信号を用いて、被検眼119の断層像が構成される。
【0069】
光源501は代表的な低コヒーレント光源であるSLD(Super Luminescent Diode)である。1台の光源を分岐して、第1の光路〜第3の光路に出射する。当然、1台の光源で光量が不足する場合は3個の光源をそれぞれの光路に使ってもよい。
【0070】
次に、参照光路について説明する。光カプラ508−1〜3によって分割された3つの参照光503−1〜3のそれぞれは、レンズ509−1〜3にて略平行光となって、出射される。次に、参照光503−1〜3は分散補償用ガラス510を通過し、ミラー511にて方向を変え、再び光カプラ508−1〜3に向かう。参照光503−1〜3は光カプラ508−1〜3を通過し、ラインセンサ523に導かれる。なお、分散補償用ガラス510は被検眼119および走査光学系を測定光504が往復した時の分散を、参照光503に対して補償するものである。なお、日本人の平均的な眼球の直径として代表的な値を想定し24mmとする。さらに、512は電動ステージであり、矢印で図示している方向に移動することができ、参照光503の光路長を、調整・制御することができる。そして、電動ステージ512はコンピュータ517により制御される。
【0071】
次に、測定光504の測定光路について説明する。光カプラ508−1〜3によって分割された測定光504−1〜3のそれぞれは、ファイバ端面から出射され、レンズ516にて略平行光となり、走査光学系を構成するXYスキャナ513のミラーに入射される。ここでは、簡単のため、XYスキャナ513は一つのミラーとして記したが、実際にはXスキャン用ミラーとYスキャン用ミラーとの2枚のミラーが近接して配置され、網膜120上を光軸に垂直な方向にラスタースキャンするものである。また、測定光504−1〜3のそれぞれの中心はXYスキャナ513のミラーの回転中心とほぼ一致するようにレンズ514、515等が調整されている。レンズ514、515は測定光504−1〜3が網膜120を走査するための光学系であり、測定光504を角膜118の付近を支点として、網膜120をスキャンする役割がある。測定光504−1〜3はそれぞれ網膜上の任意の位置に結像するように構成されている。
【0072】
測定光504−1〜3は被検眼119に入射すると、網膜120からの反射や散乱により戻り光505−1〜3となり、光カプラ508−1〜3を通過し、ラインセンサ523に導かれる。以上の構成をとることにより、3つの測定光を同時にスキャンすることができる。
【0073】
次に、検出系の構成について説明する。網膜120にて反射や散乱された戻り光505−1〜3と参照光503−1〜3とは光カプラ508−1〜3により合波される。そして、合波された合波光506−1〜3は分光器に入射し、スペクトルが得られる。分光器では、まずファイバから出た合波光がレンズ520にて略平行光となる。そして、透過型回折格子521に入射して各波長に分光され、レンズ522にてラインセンサ523に集光される。取得された各波長のスペクトルに対し、コンピュータ517が信号処理を行う。
【0074】
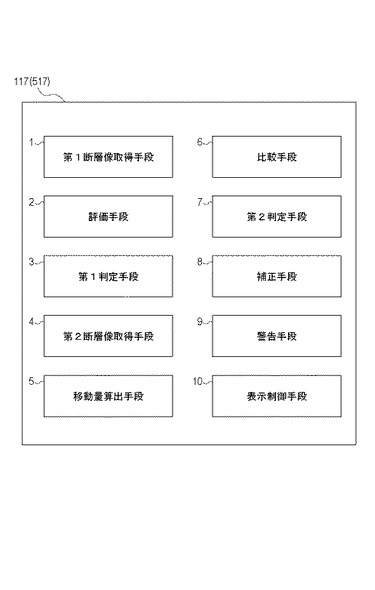
図2はコンピュータ517の機能構成の一例を模式的に示す図である。
【0075】
コンピュータ517はCPU(Central Processing Unit)等の処理装置を備え、図示しないメモリ等の記憶装置に記憶されたプログラムを実行することで、以下に述べる各種の機能を実現する。
【0076】
コンピュータ517は第1断層像取得手段1,評価手段2,第1判定手段3,第2断層像取得手段4,移動量算出手段5,比較手段6,第2判定手段7,補正手段8,警告手段9および表示制御手段10として機能する。コンピュータ517とコンピュータ117との機能は略同様であるため、各機能の詳細な説明は省略する。
【0077】
(信号処理)
ここで、図3に示すフローチャートを用いてOCT測定の信号処理の一例について説明する。ここでは、主に実施例1との差異を説明する。なお、複数の測定光を用いる点を除いて実施例2の動作は実施例1の動作と略同様であるため詳細な動作の説明は省略する。
【0078】
A1工程で、測定を開始する。この状態はOCT装置が起動されていて、被検眼が測定位置に配置されている。A2〜A6工程を繰り返すことで、本撮像の前のアライメントを行う。A2工程では複数の測定光を用いることで、第1断層像取得部1は複数の断層像を取得する。ここで、図7に3本の測定光による測定エリアを示す。601〜603がそれぞれ上、中、下の測定光による測定範囲である。それぞれの測定光は例えば3.8mm離れて走査し、3本の測定光で例えば10mm×10mmの測定範囲をカバーする。上および中、中および下の測定光で、走査範囲に例えば20%重複領域604、605がそれぞれある。なお、3つの測定光はY方向に等間隔に並び、X方向およびY方向にその位置関係を保ったまま移動する。つまり、間隔の変更や回転をすることができないものとする。
【0079】
アライメントにおいては、スキャナをX方向とY方向とに互いに垂直に連続的に走査し、図7における破線部を走査することになる。この結果、第1断層像取得手段1は、X方向には3枚の断層像を同時に得ることができ、Y方向には3つの領域をつなぎ合わせて1枚の断層像を得ることができる。走査をX方向、Y方向交互に行ったときに測定した断層像を、表示制御手段10によって画面に表示させるとともに記憶装置に記録をする。これによって取得された断層像を図8に模式的に示す。図8(a)は上の測定光による断層像、図8(b)は中の測定光による断層像、図8(c)は下の測定光による断層像、図8(d)はY方向スキャンによる断層像である。701〜712はそれぞれの測定光で撮像した断層像を3分割した場合の各領域を示している。重複領域においては、例えば、中の測定光のデータを優先して使うものとする。なお、重複領域における位置、倍率、ヒストグラムはあらかじめ模型眼などを使って同じになるように調整されているものとする。
【0080】
A3工程で、評価手段2は断層像の評価を行う。断層像の評価は各測定光で取得した断層像を分割しヒストグラムを作成して行う。つまり、評価手段2は図8(a)〜(c)をそれぞれ領域701−709に分割してヒストグラムを作成する。また、評価手段2は図8(d)も同様に分割して領域710−712のヒストグラムを作成する。
【0081】
A4工程で、第1判定手段3はアライメントが成功しているかどうかの判定を行う。右左眼、乳頭、黄斑などの測定モードを考慮してあらかじめ設定した閾値にて判断をする。判断する方法として、左目を撮像しているこの例では、第1判定手段3は領域701から領域703、領域707から領域709のヒストグラムをそれぞれ引き算し、それらの差異が小さい(5%以内である)か否かを判定する。また、第1判定手段3は領域704から領域706の各々のヒストグラムを引き算し、高輝度領域(視神経乳頭の輝度に対応する領域)で正になっている場合が80%を超えているかを判定する。アライメントに成功している場合はA6工程に進み、アライメントが成功していない場合はA5工程に進む。
【0082】
A5工程で、警告手段9は警告を行う。警告を行う形態については実施例1と略同様である。
【0083】
A6工程で、コンピュータ517は図示しない測定スイッチが押されたかどうかを判断する。測定スイッチが押された場合はA7工程に進む。
【0084】
A7工程で、第2断層像取得手段4は3次元測定を行う。ここでは一例として、10mmの範囲を撮像するものとして、X方向には1024ライン測定する。Y方向にはそれぞれの領域を394ライン測定する。第2断層像取得手段4は重複領域の79ラインを領域604,605において除くことによってY方向にも1024ラインのデータを得ることができる。取得したデータを信号処理することによって3次元の断層像を得ることができる。
【0085】
ただし、対象物が動いている場合、第2断層像取得手段4は取得した断層像から重なり部分を検索する。そして、第2断層像取得手段4は重なり部分を排除して3次元データを得る。このときY方向は1024ラインのデータにならないこともある。
【0086】
第2断層像取得手段4は3次元像から、第1断層像取得手段1によって取得された断層像に対応する断層像を3次元像から取得する。この処理が終了するとA8工程に進む。
【0087】
A8工程で、比較手段6は画像比較を行う。画像の比較は、それぞれの測定光で得られた断層画像について、アライメント時の断層像と3D測定によって得られた3次元像から得られた断層像とを比較することで行われる。すなわち、比較手段6は、上の測定光によって得られた断層像同士、中の測定光によって得られた断層像同士、下の測定光によって得られた断層像同士を比較する。また比較手段6はY方向の断層像同士を比較する。なお、実施例1と同様に、比較手段6による比較の前に移動量算出手段5は眼が測定前後でどれだけ移動したか、測定中にどれだけ移動したかを算出する。そして、比較手段6は移動量算出手段5によって算出された移動量に基づいて断層像の比較を行う。例えば、比較手段6は第1断層像取得手段1によって取得された断層像のヒストグラムと第2断層像取得 手段4によって取得された断層像のヒストグラムとの差を求める。
【0088】
A9工程で第2判定手段7は3次元像の測定の成否の判定を行う。A9工程における処理は実施例1と略同様である。測定が成功であればA11工程に進む。測定が失敗であればA10工程に進む。
【0089】
A10工程で、警告手段9は警告を出す。警告の形態については実施例1と略同様である。
【0090】
A11工程で、補正手段8は画像補正を行う。ヒストグラムを補正する場合には補正手段8はアライメント時の断層像のヒストグラムに第2断層像取得手段4によって取得した断層像のヒストグラムを近づけるように補正を行う。なお、倍率の補正を行う場合、不足するデータにはノイズレベルを挿入し、余剰データは削除する。また、実施例1と同様に各画素で2次元のγ分布が得られるため、補正手段8はこれに基づきそれぞれのXY座標においてγ補正を行い、最終的な3次元データを得ることができる。
【0091】
A12工程で、終了する。1回の測定は終了であるが、必要に応じてA1から測定を行う。
【0092】
以上説明のように本実施例によれば、複数の測定光を用いることによるOCT装置においても、実施例1と同様の効果を得ることができる。
【0093】
(その他の実施例)
また、本発明は、以下の処理を実行することによっても実現される。即ち、上述した実施形態の機能を実現するソフトウェア(プログラム)を、ネットワーク又は各種記憶媒体を介してシステム或いは装置に供給し、そのシステム或いは装置のコンピュータ(またはCPUやMPU等)がプログラムを読み出して実行する処理である。
【符号の説明】
【0094】
101 光源
102 出射光
103 参照光
104 測定光
105 戻り光
106 合波光
107 シングルモードファイバ
108 光カプラ
109−1,2 レンズ
110 分散補償用ガラス
111 ミラー
112 電動ステージ
113 XYスキャナ
114 レンズ
115 対物レンズ
116 分光器
117 コンピュータ
118 角膜
119 被検眼
120 網膜
【技術分野】
【0001】
本発明は、眼科装置および眼科用画像処理方法に関する。
【背景技術】
【0002】
現在、光学機器を用いた眼科用機器として、様々なものが使用されている。例えば、前眼部撮像機、眼底カメラ、共焦点レーザー走査検眼鏡(SLO:Scanning Laser Ophthalmoscope)等である。中でも、低コヒーレンス光を利用した光コヒーレンストモグラフィ(OCT:Optical Coherence Tomography)による光断層像撮像装置は、被検眼の断層像を高解像度で得ることができる装置であり、眼科用機器として網膜の専門外来では必要不可欠な装置になりつつある。以下、これをOCT装置と記す。
特許文献1では、眼底カメラが装備されたOCT装置が開示されている。眼底カメラによって被検眼と装置のアライメント状態、フォーカス状態などの適否を判定する。また、予備的に取得された断層像の適否、被検眼のトラッキング状態の適否をそれぞれ判定することができる。これらにより、計測タイミングを逃すことなく容易に計測ができるとしている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2010−181172
【発明の概要】
【発明が解決しようとする課題】
【0004】
OCT測定において、装置と被検眼のアライメントやフォーカスが重要なことは言うまでもない。しかし、このような調整をしたあとでも、断層像の撮像に失敗することがある。その原因としてまぶたやまつ毛による測定光の妨害、眼の移動が挙げられる。例えば、広画角に3D測定を行う場合、測定光の入射位置がまぶたやまつ毛に近い撮像領域の断層像で、まぶたやまつ毛による断層像の劣化が見られる。また、測定中に瞬きや固視不良が発生する場合もある。
本発明は、アライメントから測定終了までの間に画像を劣化させる要因が発生した場合でも良好な被検眼の断層像を得ることを目的とする。
なお、前記目的に限らず、後述する発明を実施するための形態に示す各構成により導かれる作用効果であって、従来の技術によっては得られない作用効果を奏することも本件の他の目的の1つとして位置付けることができる。
【課題を解決するための手段】
【0005】
本眼科装置は、被検眼の第1の断層像を取得する第1取得手段と、前記第1の断層像が取得された後に前記被検眼の3次元像を取得する3次元像取得手段と、前記3次元像が取得された後に前記第1の断層画像に対応する前記被検眼の第2の断層像を取得する第2取得手段と、前記第1の断層像の階調に基づいて前記第2の断層像の階調を補正する補正手段と、を備えることを特徴とする眼科装置。
【0006】
また、本眼科装置は、被検眼の第1の断層像を取得する第1取得手段と、前記第1の断層像が取得された後に前記被検眼の3次元像を取得する3次元像取得手段と、前記3次元像が取得された後に前記第1の断層画像に対応する前記被検眼の第2の断層像を取得する第2取得手段と、前記第1の断層像に基づいて前記第2の断層像の倍率を補正する補正手段と、を備える。
【0007】
さらに、本眼科用画像処理方法は、被検眼の第1の断層像を取得する第1取得工程と、前記第1の断層像が取得された後に前記被検眼の3次元像を取得する3次元像取得工程と、前記3次元像が取得された後に前記第1の断層画像に対応する前記被検眼の第2の断層像を取得する第2取得工程と、前記第1の断層像の階調に基づいて前記第2の断層像の階調を補正する補正工程と、を有する。
【0008】
また、本プログラムは、上記眼科用画像処理方法をコンピュータに実行させる。
【発明の効果】
【0009】
本発明によれば、アライメントから測定終了までの間に画像を劣化させる要因が発生した場合でも良好な被検眼の断層像を得ることができる。
【図面の簡単な説明】
【0010】
【図1】実施例1のOCT装置の構成の一例を模式的に示す図である。
【図2】コンピュータの機能構成の一例を模式的に示す図である。
【図3】実施例1の信号処理を示すフローチャートである。
【図4】(a)〜(d)は実施例1のアライメント時の断層像の一例を示す図である。
【図5】(a)〜(c)は実施例1の測定後の眼底像および断層像の一例を示す図である。
【図6】実施例2のOCT装置の構成の一例を模式的に示す説明図である。
【図7】実施例2の走査範囲の一例を説明するための図である。
【図8】(a)〜(d)は実施例2のアライメント時の断層像の一例を示す図である。
【発明を実施するための形態】
【0011】
以下、本発明の一実施例について、図面を用いて詳細に説明する。なお、本発明は以下に示す実施例に限定されるものではなく、本実施例の趣旨を逸脱しない範囲で種々変形して実施することができる。
【0012】
[実施例1]
図1は、実施例1におけるOCT装置の構成の一例を模式的に示す図である。
【0013】
(光学系)
OCT装置は、マイケルソン干渉系で構成されている。光源101の出射光102はシングルモードファイバ107に導かれて光カプラ108に入射し、光カプラ108にて参照光103と測定光104とに分割される。そして測定光104は、観察対像の網膜120によって反射あるいは散乱され、戻り光105となって光カプラ108に戻る。そして光カプラ108によって、参照光路を経由してきた参照光103と合波され合波光106となり、分光器116に到達する。
【0014】
光源101は代表的な低コヒーレント光源であるSLD光源(Super Luminescent Diode)である。波長は眼を測定することを鑑みると、近赤外光が適する。さらに波長は、得られる断層像の横方向の分解能に影響するため、なるべく短波長であることが望ましく、ここでは例えば中心波長840nm、波長幅50nmとする。当然観察対象の測定部位によっては、他の波長を選んでも良い。なお光源の種類は、ここではSLD光源を選択したが、低コヒーレント光が出射できればよく、ASE光源(Amplified Spontaneous Emission)等も用いることができる。
【0015】
次に、参照光103の参照光路について説明する。光カプラ108によって分割された参照光103は、レンズ109−1にて略平行光となって出射される。その後参照光103は分散補償用ガラス110を通過してミラー111にて方向を変える。そして再び光カプラ108を介して分光器116に導かれる。なお、分散補償用ガラス110は被検眼119および走査光学系を測定光104が往復した時の分散を、参照光103に対して補償するものである。ここでは、一例として日本人の平均的な眼球の直径として代表的な値を想定し24mmとする。参照光の光路長は電動ステージ112で矢印の方向に移動することによってコヒーレンスゲートの位置を調整することができる。コヒーレンスゲートとは、測定光路における参照光路と等距離になる位置のことである。電動ステージ112の制御はコンピュータ117によって行われる。
【0016】
次に、測定光104の測定光路について説明する。光カプラ108によって分割された測定光104は、レンズ109−2にて、略平行光となって出射され、走査光学系を構成するXYスキャナ113のミラーに入射される。図1においては簡単のためXYスキャナ113は一つのミラーとしているが、実際にはXスキャン用ミラーとYスキャン用ミラーとの2枚のミラーが近接して配置されている。ここで、Z軸方向を測定光の光軸方向とし、Z軸に垂直で紙面に水平な方向をX軸方向、Z軸に垂直で紙面に垂直な方向をY軸方向とする。
【0017】
測定光はレンズ114、対物レンズ115を介して被検眼119に到達し角膜118の付近を支点として網膜120をスキャンする。網膜120で反射、散乱された光は対物レンズ115、レンズ114、XYスキャナ113、レンズ109−2を通り、ファイバに戻る。そして、光カプラ108を介して、参照光103と合波され分光器116に到達する。
【0018】
分光器116に到達した合波光106は、回折格子により波長毎に分割され、図示しないセンサにより波長毎の強度が検出される。そして、コンピュータ117によってフーリエ変換等が行われて断層像が生成され、コンピュータ117の記憶部に記憶されると共に必要に応じて図示しない表示部に表示される。
【0019】
図2はコンピュータ117の機能構成の一例を模式的に示す図である。
【0020】
コンピュータ117はCPU(Central Processing Unit)等の処理装置を備え、図示しないメモリ等の記憶装置に記憶されたプログラムを実行することで、以下に述べる各種の機能を実現する。
【0021】
コンピュータ117は第1断層像取得手段1,評価手段2,第1判定手段3,第2断層像取得手段4,移動量算出手段5,比較手段6,第2判定手段7,補正手段8,警告手段9および表示制御手段10として機能する。
【0022】
第1断層像取得手段1は、被検眼に対する図1に示す眼科装置のアライメント時に、センサにより検出された波長毎の強度に基づいて被検眼の断層像(第1の断層像)を取得する。すなわち、第1断層像取得手段1は被検眼の第1の断層像を取得する第1取得手段の一例に相当する。具体的には、第1断層像取得手段1は、XYスキャナ113のY方向を固定した状態でX方向に走査させることでX方向の断層像を取得する。また、第1断層像取得手段1は、XYスキャナ113のX方向を固定した状態でY方向に走査させることでY方向の断層像を取得する。第1断層像取得手段1は上記の処理を交互に連続的に実行することによって、X方向の断層像とY方向の断層像の2枚の断層像を得る。なお、第1断層像取得手段1は必ずしも2枚の断層像を取得する必要はなく、例えば、Y方向の断層像のみを取得することとしてもよい。なお、第1断層像取得手段1は、センサにより検出された波長毎の強度に基づいて他のコンピュータで生成された断層像を無線または有線を介して取得することとしてもよい。
【0023】
評価手段2は、第1断層像取得手段1によって取得された断層像の評価を行う。具体的には評価手段2は第1断層像取得手段1によって取得された断層像を複数の領域に分割して各領域における断層像のヒストグラムを求める。例えば、評価手段2は断層像を3つの領域に分割し、各領域でのヒストグラムを求める。ここで、乳頭が含まれる領域と黄班が含まれる領域と乳頭および黄班が含まれない領域とではそれぞれヒストグラムが異なる。
【0024】
なお、分割する領域の数は適宜変更可能であり3つに限定されるものではない。また、評価手段2は分割した各領域のヒストグラムを求めることに限定されるものではなく、例えば、領域が3つに分割されている場合には並んだ3つの領域のうち真ん中の領域以外の領域のヒストグラムを求めることとしてもよい。
【0025】
図4(a)はX方向の断層像の一例であり、図4(b)はX方向の断層像の各領域301−303におけるヒストグラムの一例を示す図である。また、図4(c)はY方向の断層像の一例であり、図4(d)はY方向の断層像の各領域304−306におけるヒストグラムの一例を示す図である。
【0026】
第1判定手段3は評価手段2による評価に基づいてアライメントの状態(アライメントが完了しているか否か)を判定する。具体的には、第1判定手段3は評価手段2によって求められたヒストグラムに基づいてアライメントの状態を判定する。例えば、左眼の黄班を略中心として撮影している場合には、第1判定手段3は図4(a)に示す領域301から領域303のヒストグラムを引き算し、高輝度領域で正になっている場合が所定の閾値以上か否かを判断する。領域301には視神経乳頭が含まれているため、領域301のヒストグラムは領域303のヒストグラムに比べて高輝度側での頻度が高くなる。すなわち、領域301のヒストグラムから領域303のヒストグラムを引き算することで視神経乳頭に対応する輝度を示すヒストグラムが得られることになる。言い換えれば、第1判定手段3は領域301から領域303のヒストグラムを引き算し、視神経乳頭に対応する輝度領域が正になっている場合が所定の閾値以上か否かを判断する。ここで、所定の閾値とは例えば80%であるが、他の値とすることも可能である。
【0027】
また、右眼を撮影している場合も、左眼の場合と同様に視神経乳頭を含む領域から視神経乳頭を含まない領域を引き算することで視神経乳頭に対応する輝度領域が正になっている場合が所定の閾値以上か否かを判断する。
【0028】
さらに、第1判定手段3は、例えば、図4(c)に示す領域304と領域306で引き算をして、この差が所定の閾値以内か否かを判定する。このアライメントの判定方法は、黄班および視神経乳頭を通る直線を対象に被検眼の構造は似ていることを利用したものである。また、所定の閾値とは例えば、領域304と領域306との頻度(画素)の差が1の領域における画素の5%である場合を指す。但し、所定の閾値はこれに限定されるものではなく、任意に変更することが可能である。
【0029】
第1判定手段3は、X方向の断層像において視神経乳頭に対応する輝度領域が正になっている場合が所定の閾値以上であり、Y方向の断層像において黄班を含む領域に隣接する領域のヒストグラムの差が所定の閾値以内である場合にはアライメントが成功したものと判定する。すなわち、第1判定手段3はアライメント中に取得した第1の断層像に基づいてアライメントの状態を判定する。具体的には第1判定手段3は第1の断層像のヒストグラムに基づいてアライメントの状態を判定する。より具体的には第1判定手段3は複数の領域に分けられた第1の断層像の少なくとも2以上の領域におけるヒストグラムに基づいてアライメントの状態を判定する。また、第1判定手段3は、第1の断層像の中心を含む領域に隣接する2つの領域における第1の断層像のヒストグラムの差に基づいてアライメントの状態を判定する。
【0030】
第2断層像取得手段4は、被検眼の3次元像を取得し、第1断層像取得手段1が取得した断層像に対応する位置の断層像(第2の断層像)を例えば3次元像から取得する。すなわち、第2断層像取得手段4は第1の断層像が取得された後に被検眼の3次元像を取得する3次元像取得手段の一例に相当する。また、第2断層像取得手段4は、3次元像が取得された後に第1の断層画像に対応する被検眼の第2の断層像を取得する第2取得手段の一例に相当する。
【0031】
なお、第2断層像取得手段4は3次元像から断層像を取得することに限定されるものではなく、3次元像を構成する二次元断層像を取得する場合もある。また3次元像とは複数の断層像から構成され、複数の断層像間が補間されている場合も補間されていない場合も含む。
【0032】
第2断層像取得手段4は、アライメント時にスキャンした位置に対応するX方向の断層像およびY方向の断層像を例えば3次元像から取得する。すなわち、第2の断層像は被検眼における第1の断層像の位置に対応する。図5(b)は第2断層像取得手段4が取得したX方向の断層像を示し、図5(c)は第2断層像取得手段4が取得したY方向の断層像を示している。なお、第2断層像取得手段4は、3次元像に基づいて他のコンピュータで生成された断層像を無線または有線を介して取得することとしてもよい。また、第1断層像取得手段1が取得した断層像の被検眼における位置情報を記憶しておき、第2断層像取得手段4はこの位置情報に基づいて断層像を取得することとしてもよい。なお、第1断層像取得手段1が黄班を中心として断層像を取得した場合、第2断層像取得部4は眼底像から黄班を検出した後に黄班を中心として断層像を取得することとしてもよい。
【0033】
移動量算出手段5は、被検眼の移動量を算出する。具体的には、移動量算出手段5は、図4(a),(b)および図5(b),(c)を用いて移動量を算出する。移動量の算出は、図4(a)とマッチングする範囲が図5(b)のどこに相当するかを検索することにより行われる。
【0034】
まず、移動量算出手段5は、眼が測定前後で移動したか、測定中にどれだけ移動したかを判断する。測定前後の眼の移動は、図4(a)とマッチングする範囲が図5(b)のどこに相当するかを検索することにより算出する。また、移動量算出手段5は、測定中のZ軸方向への移動については特にY方向がスロースキャンなので、Y方向に対して縮んだり、伸びたりした画像であるかを、断層像の倍率から計測する。
【0035】
比較手段6は、第1断層像取得手段1によって取得された断層像と第2断層像取得手段4によって取得された断層像とを比較する。より具体的には、移動量算出手段によって算出された移動量に基づいて第2断層像取得手段4によって取得された断層像の位置および倍率を補正することで、対応する場所同士のヒストグラムを比較する。
【0036】
第2判定手段7は、比較手段6の比較結果に基づいて被検眼の3次元像の測定状態(測定が成功しているか否か)を判定する。具体的には第2判定手段7は、第1断層像取得手段1によって取得された断層像と第2断層像取得手段4によって取得された断層像との位置、倍率、ヒストグラムの差がそれぞれ閾値未満であれば、測定に成功したと判定する。例えば、第1断層像取得手段1によって取得された断層像と第2断層像取得手段4によって取得された断層像との位置の差により生じた異なる部分が断層像全体の10%以下の場合の場合には第2判定手段7は測定に成功したと判定する。なお、測定に成功したと判定する場合を10%以下の場合としたが、これに限定されるものではなく種々の値に変更可能である。
【0037】
また、第1断層像取得手段1によって取得された断層像と第2断層像取得手段4によって取得された断層像との倍率の差が2%以下の場合には第2判定手段7は測定に成功したと判定する。なお、測定に成功したと判定する場合を2%以下の場合としたが、これに限定されるものではなく種々の値に変更可能である。
【0038】
さらに、第1断層像取得手段1によって取得された断層像と第2断層像取得手段4によって取得された断層像とのヒストグラムの差が10%以下である場合には第2判定手段7は測定に成功したと判定する。なお、ヒストグラムの差とは、各領域における第1断層像取得手段1によって取得された断層像のヒストグラムと第2断層像取得手段4によって取得された断層像のヒストグラムとの異なる部分の画素数の1の領域における全体の画素数に対する割合である。また、測定に成功したと判定する場合を10%以下の場合としたが、これに限定されるものではなく種々の値に変更可能である。
【0039】
また、第2判定手段7はヒストグラムの差が10%より大きい場合には、各領域のヒストグラムのうちノイズレベルに含まれている割合を取得して、画像の補正が可能か否かを判定する。ここで、ノイズレベルとは予め取得した被検査物が何もない時のデータである。第2判定手段7は例えば、各領域のヒストグラムのうちノイズレベルに含まれている割合が80%以上の場合には画像の補正ができないと判定する。なお、画像の補正ができないと判定する場合を80%以上の場合としたが、これに限定されるものではなく種々の値に変更可能である。
【0040】
すなわち、第2判定手段7は第1の断層像と前記第2の断層像とに基づいて、3次元像の測定状態を判定する。具体的には、第2判定手段7は、第1の断層像のヒストグラムと第2の断層像のヒストグラムとに基づいて3次元像の測定状態を判定する。
【0041】
補正手段8は、第2断層像取得手段4によって取得された断層像のヒストグラム(階調)を第1断層像取得手段1によって取得された断層像のヒストグラム(階調)に等しくなるように補正する。すなわち、補正手段8は、第2断層像取得手段4によって取得された断層像のヒストグラムと第1断層像取得手段1によって取得された断層像のヒストグラムとの差をなくすように第1断層像取得手段1によって取得された断層像の階調を補正する。補正手段8は例えばγ補正を用いるが、これに限定されるものではなく他の方法を用いてヒストグラムを補正することとしてもよい。このヒストグラムを補正する処理をX方向の断層像およびY方向の断層像に対して行う。すなわち、補正手段8は第1の断層像の階調に基づいて第2の断層像の階調を補正する補正手段の一例に相当する。より具体的には、第2断層像取得手段4は、第2の断層像のヒストグラムと第1の断層像のヒストグラムとの差に基づいて第2の断層像の階調を補正する。
【0042】
本実施例では図5(b),(c)に示すように、X方向の断層像およびY方向の断層像のそれぞれは3つの領域に分割されているので、ヒストグラムの補正はそれぞれの断層像の3箇所で行われる。従って、XY平面上において9箇所に分割された2次元のγ分布が得られる。補正手段8は、これに基づいて3次元像に対してヒストグラムの補正(γ補正)行う。すなわち、補正手段8は、第1の断層像のヒストグラムと前2の断層像のヒストグラムとの差に基づいて3次元像の階調を補正する補正手段の一例に相当する。
【0043】
また、補正手段8は第2断層像取得手段4によって取得された断層像の倍率を第1断層像取得手段1によって取得された断層像の倍率に等しくなるように補正する。すなわち、補正手段8は第1の断層像に基づいて第2の断層像の倍率を補正する補正手段の一例に相当する。なお、補正手段8は倍率の補正により不足するデータはノイズレベルのデータを入れ、過剰になる場合はデータを削除する。同様に補正手段8は、3次元像に対して倍率の補正を行う。
【0044】
警告手段9は、第1判定手段3によってアライメントが成功していないと判定された場合に警告を行う。警告の形態としてはブザー等の音による警告であってもよいし、警告を示す表示形態を後述する表示制御手段10によって表示部に表示させることとしてもよい。警告を示す表示形態としては「アライメント確認」,「アライメント中」等のアライメントが成功していない旨を示す文字を表示することとしてもよいし、「×」等の図によりアライメントが成功していない旨を示すこととしてもよい。
【0045】
また、警告手段9は、第2判定手段7によって三次元像の測定が成功していないと判定された場合に警告を行う。警告の形態としてはブザー等の音による警告であってもよいし、警告を示す表示形態を後述する表示制御手段10によって表示させることとしてもよい。警告を示す表示形態としては「要再測定」,「測定失敗」等の3次元像の測定が成功していない旨を示す文字を表示することとしてもよいし、「×」等の図により3次元像の測定が成功していない旨を示すこととしてもよい。なお、例えばエラーの要因ごとに位置または倍率であれば「固視不良」、ヒストグラムであれば「光遮断」、ノイズレベルであれば「感度不足」などと警告手段9は表示制御手段10に表示させてもよい。すなわち、警告手段9は第1判定手段によるアライメントの状態の判定結果に基づいて警告を行う。また、警告手段9は第2判定手段による3次元像の測定状態の判定結果に基づいて、警告を行う。
【0046】
表示制御手段10は、各種の情報を表示部に表示させる。例えば、断層像や警告手段9から表示部に表示するように指示された警告等を表示部に表示させる。すなわち、表示制御手段10は第1判定手段3によるアライメントの状態の判定結果に基づいて、警告を示す表示形態を表示部に表示させる。また、表示制御手段10は、第2判定手段による3次元像の測定状態の判定結果に基づいて、警告を示す表示形態を表示部に表示させる。
【0047】
(信号処理)
ここで、OCT測定の信号処理(眼科用画像処理方法)について図3を用いて説明する。
【0048】
A1工程で、測定を開始する。この状態はOCT装置が起動されていて、被検眼が測定位置に配置されている。
【0049】
A2〜A6工程を繰り返すことで、本撮像前に装置と被検眼のアライメントを行う。A2工程(第1取得工程)では、第1断層像取得手段1によって断層像(プレスキャン像)を取得する。具体的には、第1断層像取得手段1は、XYスキャナ113のY方向を固定した状態でX方向に走査させ、X方向を固定した状態でY方向に走査させる処理を交互に連続的に行うことによって、X方向の断層像とY方向の断層像の2枚の断層像を得る。A2〜A6工程のループを一周するごとにX方向またはY方向の断層像を撮像する。ここで、図4にA2工程において取得した断層像の模式図を示す。それぞれ図4(a)はX方向、図4(c)はY方向の断層像である。
【0050】
図4(b)、(d)はA3工程で説明するヒストグラムである。図4(a)と(c)の断層像は、X方向とY方向の断層像としてそれぞれ表示部の画面の一部に例えば上下に並べて表示する。そして、ループを周る毎に順次更新しながら断層像を表示し、さらに図示しない記憶部への上書き保存を繰り返す。ここでは例えば、図4(a)が直前に撮像された断層像、図4(c)がその前に撮像された断層像とする。なお、断層像は眼底の10mmの幅の範囲を撮像するものとして、X方向には1024ライン、Y方向には1024ラインのデータを取得する。X方向またはY方向の撮像が終わればA3工程に進む。
【0051】
A3工程で、評価手段2はA2工程で取得した断層像の評価を行う。画像の評価としてここではヒストグラムを利用する。このため、評価手段2は断層像のヒストグラムを求める。図4(b)は図4(a)における3つの領域のヒストグラムで、左から領域301−303に対応する。当然3つの領域である必要はなく、それより多くても少なくてもよい。ヒストグラムの横軸がグレースケール(輝度)、縦軸が頻度(画素数)である。それぞれにおける実線がその領域のヒストグラムである。それぞれの領域におけるヒストグラムに点線で示してあるのは対象物がないときに発生するノイズのヒストグラムである。つまり撮像対象物がない時は、画素がグレースケールの低いところに局在した分布になる。このデータはあらかじめ被検眼の測定前などに、測定位置に何も設置しない状態(開放状態)で撮像することで取得しておく。図4(c)はY方向にスキャンした時の断層像、図4(d)は図4(c)における3つの領域のヒストグラムを模式的に示したものである。左から領域304−306のヒストグラムに対応する。
【0052】
画像の評価について、図4(b)および(d)のヒストグラムを用いて説明する。領域301は乳頭があり、比較的高反射なため、画素がグレースケールの高い位置まで分布している。領域302は、黄斑が含まれ、例えばヒストグラムに2つのこぶがある。領域303は、黄斑を挟んで乳頭の反対側の位置で高反射部分がそれほど多くなく、グレースケールの中心から低い位置の分布となっている。領域304および領域306は黄斑をはさんでそれぞれ対向する位置にあるが、乳頭がどちらにもないので領域303とほぼ同じような分布となる。領域305は黄斑が含まれるので302と同じような分布となる。画像評価が終わればA4工程に進む。
【0053】
A4工程で、第1判定部3によってアライメントが成功しているかどうかの判定を行う。右左眼、乳頭、黄斑など測定部位、測定領域の大きさ等の測定モードに基づいた撮像領域の分割数、各領域に含まれる部位の種別等を考慮して、第1判定部3はあらかじめ設定された閾値を用いて判定を行う。なお、第1判定部3は、断層画像から層構造を認識し予め登録された形状と比較することにより、各領域に含まれる部位の種別を判断しても良い。本例では、左眼を撮像しているとして例えば次のようになる。第1判定部3は領域301から領域303のヒストグラムを引き算し、高輝度領域で正になっている場合が多いかを判断する。加えて領域304と領域306で引き算をし、第1判定部3は正負が略同等であり、所定の閾値以内か否かを判断する。アライメントに成功していると判断すれば、A6工程に進む。アライメントに失敗していると判断すればA5工程に進む。
【0054】
A5工程で、警告手段9は警告を行う。A4工程で、閾値より外れている場合には、「アライメント確認」などと表示制御部10に表示部に表示する。警告を表示するとA6工程に進む。警告は一定時間表示される。ユーザは、警告表示がないことを確認して、コンピュータ117に設けられた測定スイッチを押すことになる。
【0055】
A6工程で、コンピュータ117は図示しない測定スイッチが押されたかどうかを判断する。測定スイッチが押されている場合はA7工程に進み、押されていない場合はA2工程でアライメントを行う。
【0056】
A7工程で、第2断層像取得手段4は3次元測定を行う(3次元像取得工程)。X方向に1024画素の断層像をY方向の1024箇所にて分光器のデータを取得する。ここでは、X方向にファストスキャン、Y方向にスロースキャンを行う。X方向に一往復するごとに分光器からのデータを保存していく。例えば分光器は2048画素とすると、一往復で1024×2048の配列を取得する。スキャンが終了して、すべてのデータが保存されると1024×1024×2048の3次元配列となる。X方向に一往復して取得した断層像(B−Scan)毎に処理をする。断層像は、分光器からのデータにノイズ除去、波長波数変換、フーリエ変換などを施すことで得られる。例えば断層像の深さ方向のデータとしては500画素を切り出して用いる。その結果、3次元のデータ(3次元像)として1024×1024×500の3次元配列を得る。図5は、3次元測定の断層像である。図5(a)は、分光器からのデータを積分して得た2次元像である。2次元像には黄斑401、乳頭402、血管403などがある。図5(b)は2次元像におけるA−A’断面で、アライメント時にXスキャンをした位置に相当する。図5(c)は、2次元像におけるB−B’断面で、アライメント時にYスキャンをした位置に相当する。第2断層像取得手段4は3次元像から図5(b),(c)に示すような断層像を取得する(第2取得工程)。この処理が終了するとA8工程に進む。
【0057】
A8工程で比較手段6は画像比較を行う。比較手段6は例えばA7工程で取得した断層像と測定スイッチが押される直前にA2工程で取得した最新の断層像とを比較する。ここでは、簡単のため測定中に光軸に対して垂直な面内でのみ眼が移動したものとする。つまり、光軸方向と垂直な面内であれば、結像する位置、走査範囲は変わらないことになる。もちろん、まぶたやまつ毛に光を遮られると画像は暗くなる。なお、光軸に対して回転、光軸方向に移動がある場合は、アライメント時に測定したと思われる位置のデータに最も近いデータを3Dデータの中から検索する。このようにして、第2断層像取得手段4はアライメント時の画像と対比できるデータを取得する。
【0058】
画像の比較は、図4(a)と図5(b)、図4(c)と図5(c)を用いて行う。まず、移動量算出手段5が測定前後で眼が移動したか、測定中にどれだけ移動したかを判断する。測定前後の眼の移動量は、図4(a)とマッチングする範囲が図5(b)のどこに相当するかを検索することにより算出する。測定中の被検眼のZ軸方向への移動量は、特にY方向がスロースキャンなので、Y方向に対して縮んだり、伸びたりした画像であるかを、倍率から計測する。次に、ヒストグラムの比較を行う。それは、図4(a)と図5(b)、図4(c)と図5(c)のヒストグラムを用いて行う。ここでは簡単のため移動がないとしているので、比較手段6は、領域301−306のヒストグラムから対応する領域404−409のヒストグラムを引き算する。ここでは、図5(c)における領域407、408、409と右に行くほどコントラストが薄くなっているのでヒストグラムの分布に差が発生する。また、眼の移動がある場合は、比較手段6は、位置、倍率を補正して、対応する場所同士のヒストグラムを比較することなる。当然、移動により比較できるところがない場合は、そのデータを除外する。また、アライメント時の断層像と測定後の断層像の画素数が異なれば、適宜補間を行うことにより画素数を一致させる。画像比較が終わればA9工程に進む。
【0059】
A9工程で第2判定手段7は3次元像の測定の成否の判定を行う。例えば、第2判定手段7は位置、倍率、ヒストグラムの差が閾値より大きければ、測定に失敗したと判断をする。閾値の例としては次のようになる。位置であれば10%以内、倍率であれば2%以内、ヒストグラムであれば10%以内である。また、ヒストグラムの差が10%以上である場合は、さらに第2判定手段7は断層像のヒストグラムを断層像のノイズレベルに対して比較をする。断層像のノイズレベルとは予め取得した、被検査物が何もない時のデータである。特に、ノイズレベルの領域に80%のデータが入っている場合は、画像の修正ができなくなる可能性がある。測定が成功であればA11工程に進む。測定が失敗であればA10工程に進む。
【0060】
A10工程で警告手段9は警告を出す。警告は、「要再測定」などと表示部に表示する。当然細かく分類して、エラーの要因ごとに、位置または倍率であれば「固視不良」、ヒストグラムであれば「光遮断」、ノイズレベルであれば「感度不足」などと表示してもよい。表示したのちA12工程に進む。
【0061】
A11工程(補正工程)で補正手段8は画像補正を行う。判定の閾値以内であっても必要に応じて、倍率やヒストグラムを補正する。倍率の補正により不足するデータはノイズレベルのデータを入れ、過剰になる場合はデータを削除する。ヒストグラムの補正は、一般的な方法で良く、例えばγ補正を用いる。γ補正では、それぞれの領域において、γ補正によるヒストグラムがアライメント時の領域のヒストグラムに近づくように行う。これをX方向およびY方向のデータにて行う。ここでのγ補正を行う箇所は、X方向の断層像およびY方向の断層像のそれぞれにおいて3か所ずつであるが、直線補間などを用いることによって、各画素で2次元のγ分布が得られる。補正手段8はこれに基づきそれぞれのXY座標においてγ補正を行い、最終的な3次元データを得ることができる。
【0062】
A12工程で、終了する。ここでは、1回の撮像ルーチンの終了である。「再計測」と表示された場合、その他の測定を行う場合など、必要に応じてA1工程から再計測を行う。
【0063】
以上説明のように本実施例によれば、アライメントから測定終了までの間に画像を劣化させる要因が発生した場合でも良好な被検眼の断層像を得ることができる。
【0064】
また、本実施例によれば、アライメント時の断層像と測定後の断層像を評価し、瞬き、まつげ、眼の移動などにより断層像の取得の失敗を検出することができ、さらに、アライメントの再実施、断層像の再取得の処理等の適切な処理を促すことができる。
【0065】
なお、本実施例においては、直交する2つの断層像を取得して評価を行ったが、3次元測定時の主走査方向に交差する1つの断層像を取得した処理であれば、瞬き、まつ毛等による断層像の取得の失敗を判断することができる。
【0066】
[実施例2]
図6は、実施例2におけるOCT装置の構成の一例を模式的に示す構成を示す図である。
【0067】
本実施例では3本の測定光を有するOCT装置の実施例を示す。なお、測定光の数はこれに限定されるものではなく、種々の値に変更可能であり測定光が複数であればよい。
【0068】
(光学系)
光源501から出射した光である出射光は、第1の光路と第2の光路と第3の光路の3つの光路を通る出射光502−1〜3に分割される。さらに、この3つの出射光502−1〜3のそれぞれは、光カプラ508−1〜3にて参照光503−1〜3と測定光504−1〜3とに分割される。このように分割された3つの測定光504−1〜3は、観察対象である被検眼119における網膜120等のそれぞれの測定箇所によって反射あるいは散乱され、戻り光505−1〜3となって戻される。そして、光カプラ508−1〜3によって、参照光路を経由してきた参照光503−1〜3と合波され合波光506−1〜3となる。合波光506−1〜3は、透過型回折格子521によって波長毎にそれぞれ分光され、ラインセンサ523の異なる領域に入射される。ラインセンサ523からの信号を用いて、被検眼119の断層像が構成される。
【0069】
光源501は代表的な低コヒーレント光源であるSLD(Super Luminescent Diode)である。1台の光源を分岐して、第1の光路〜第3の光路に出射する。当然、1台の光源で光量が不足する場合は3個の光源をそれぞれの光路に使ってもよい。
【0070】
次に、参照光路について説明する。光カプラ508−1〜3によって分割された3つの参照光503−1〜3のそれぞれは、レンズ509−1〜3にて略平行光となって、出射される。次に、参照光503−1〜3は分散補償用ガラス510を通過し、ミラー511にて方向を変え、再び光カプラ508−1〜3に向かう。参照光503−1〜3は光カプラ508−1〜3を通過し、ラインセンサ523に導かれる。なお、分散補償用ガラス510は被検眼119および走査光学系を測定光504が往復した時の分散を、参照光503に対して補償するものである。なお、日本人の平均的な眼球の直径として代表的な値を想定し24mmとする。さらに、512は電動ステージであり、矢印で図示している方向に移動することができ、参照光503の光路長を、調整・制御することができる。そして、電動ステージ512はコンピュータ517により制御される。
【0071】
次に、測定光504の測定光路について説明する。光カプラ508−1〜3によって分割された測定光504−1〜3のそれぞれは、ファイバ端面から出射され、レンズ516にて略平行光となり、走査光学系を構成するXYスキャナ513のミラーに入射される。ここでは、簡単のため、XYスキャナ513は一つのミラーとして記したが、実際にはXスキャン用ミラーとYスキャン用ミラーとの2枚のミラーが近接して配置され、網膜120上を光軸に垂直な方向にラスタースキャンするものである。また、測定光504−1〜3のそれぞれの中心はXYスキャナ513のミラーの回転中心とほぼ一致するようにレンズ514、515等が調整されている。レンズ514、515は測定光504−1〜3が網膜120を走査するための光学系であり、測定光504を角膜118の付近を支点として、網膜120をスキャンする役割がある。測定光504−1〜3はそれぞれ網膜上の任意の位置に結像するように構成されている。
【0072】
測定光504−1〜3は被検眼119に入射すると、網膜120からの反射や散乱により戻り光505−1〜3となり、光カプラ508−1〜3を通過し、ラインセンサ523に導かれる。以上の構成をとることにより、3つの測定光を同時にスキャンすることができる。
【0073】
次に、検出系の構成について説明する。網膜120にて反射や散乱された戻り光505−1〜3と参照光503−1〜3とは光カプラ508−1〜3により合波される。そして、合波された合波光506−1〜3は分光器に入射し、スペクトルが得られる。分光器では、まずファイバから出た合波光がレンズ520にて略平行光となる。そして、透過型回折格子521に入射して各波長に分光され、レンズ522にてラインセンサ523に集光される。取得された各波長のスペクトルに対し、コンピュータ517が信号処理を行う。
【0074】
図2はコンピュータ517の機能構成の一例を模式的に示す図である。
【0075】
コンピュータ517はCPU(Central Processing Unit)等の処理装置を備え、図示しないメモリ等の記憶装置に記憶されたプログラムを実行することで、以下に述べる各種の機能を実現する。
【0076】
コンピュータ517は第1断層像取得手段1,評価手段2,第1判定手段3,第2断層像取得手段4,移動量算出手段5,比較手段6,第2判定手段7,補正手段8,警告手段9および表示制御手段10として機能する。コンピュータ517とコンピュータ117との機能は略同様であるため、各機能の詳細な説明は省略する。
【0077】
(信号処理)
ここで、図3に示すフローチャートを用いてOCT測定の信号処理の一例について説明する。ここでは、主に実施例1との差異を説明する。なお、複数の測定光を用いる点を除いて実施例2の動作は実施例1の動作と略同様であるため詳細な動作の説明は省略する。
【0078】
A1工程で、測定を開始する。この状態はOCT装置が起動されていて、被検眼が測定位置に配置されている。A2〜A6工程を繰り返すことで、本撮像の前のアライメントを行う。A2工程では複数の測定光を用いることで、第1断層像取得部1は複数の断層像を取得する。ここで、図7に3本の測定光による測定エリアを示す。601〜603がそれぞれ上、中、下の測定光による測定範囲である。それぞれの測定光は例えば3.8mm離れて走査し、3本の測定光で例えば10mm×10mmの測定範囲をカバーする。上および中、中および下の測定光で、走査範囲に例えば20%重複領域604、605がそれぞれある。なお、3つの測定光はY方向に等間隔に並び、X方向およびY方向にその位置関係を保ったまま移動する。つまり、間隔の変更や回転をすることができないものとする。
【0079】
アライメントにおいては、スキャナをX方向とY方向とに互いに垂直に連続的に走査し、図7における破線部を走査することになる。この結果、第1断層像取得手段1は、X方向には3枚の断層像を同時に得ることができ、Y方向には3つの領域をつなぎ合わせて1枚の断層像を得ることができる。走査をX方向、Y方向交互に行ったときに測定した断層像を、表示制御手段10によって画面に表示させるとともに記憶装置に記録をする。これによって取得された断層像を図8に模式的に示す。図8(a)は上の測定光による断層像、図8(b)は中の測定光による断層像、図8(c)は下の測定光による断層像、図8(d)はY方向スキャンによる断層像である。701〜712はそれぞれの測定光で撮像した断層像を3分割した場合の各領域を示している。重複領域においては、例えば、中の測定光のデータを優先して使うものとする。なお、重複領域における位置、倍率、ヒストグラムはあらかじめ模型眼などを使って同じになるように調整されているものとする。
【0080】
A3工程で、評価手段2は断層像の評価を行う。断層像の評価は各測定光で取得した断層像を分割しヒストグラムを作成して行う。つまり、評価手段2は図8(a)〜(c)をそれぞれ領域701−709に分割してヒストグラムを作成する。また、評価手段2は図8(d)も同様に分割して領域710−712のヒストグラムを作成する。
【0081】
A4工程で、第1判定手段3はアライメントが成功しているかどうかの判定を行う。右左眼、乳頭、黄斑などの測定モードを考慮してあらかじめ設定した閾値にて判断をする。判断する方法として、左目を撮像しているこの例では、第1判定手段3は領域701から領域703、領域707から領域709のヒストグラムをそれぞれ引き算し、それらの差異が小さい(5%以内である)か否かを判定する。また、第1判定手段3は領域704から領域706の各々のヒストグラムを引き算し、高輝度領域(視神経乳頭の輝度に対応する領域)で正になっている場合が80%を超えているかを判定する。アライメントに成功している場合はA6工程に進み、アライメントが成功していない場合はA5工程に進む。
【0082】
A5工程で、警告手段9は警告を行う。警告を行う形態については実施例1と略同様である。
【0083】
A6工程で、コンピュータ517は図示しない測定スイッチが押されたかどうかを判断する。測定スイッチが押された場合はA7工程に進む。
【0084】
A7工程で、第2断層像取得手段4は3次元測定を行う。ここでは一例として、10mmの範囲を撮像するものとして、X方向には1024ライン測定する。Y方向にはそれぞれの領域を394ライン測定する。第2断層像取得手段4は重複領域の79ラインを領域604,605において除くことによってY方向にも1024ラインのデータを得ることができる。取得したデータを信号処理することによって3次元の断層像を得ることができる。
【0085】
ただし、対象物が動いている場合、第2断層像取得手段4は取得した断層像から重なり部分を検索する。そして、第2断層像取得手段4は重なり部分を排除して3次元データを得る。このときY方向は1024ラインのデータにならないこともある。
【0086】
第2断層像取得手段4は3次元像から、第1断層像取得手段1によって取得された断層像に対応する断層像を3次元像から取得する。この処理が終了するとA8工程に進む。
【0087】
A8工程で、比較手段6は画像比較を行う。画像の比較は、それぞれの測定光で得られた断層画像について、アライメント時の断層像と3D測定によって得られた3次元像から得られた断層像とを比較することで行われる。すなわち、比較手段6は、上の測定光によって得られた断層像同士、中の測定光によって得られた断層像同士、下の測定光によって得られた断層像同士を比較する。また比較手段6はY方向の断層像同士を比較する。なお、実施例1と同様に、比較手段6による比較の前に移動量算出手段5は眼が測定前後でどれだけ移動したか、測定中にどれだけ移動したかを算出する。そして、比較手段6は移動量算出手段5によって算出された移動量に基づいて断層像の比較を行う。例えば、比較手段6は第1断層像取得手段1によって取得された断層像のヒストグラムと第2断層像取得 手段4によって取得された断層像のヒストグラムとの差を求める。
【0088】
A9工程で第2判定手段7は3次元像の測定の成否の判定を行う。A9工程における処理は実施例1と略同様である。測定が成功であればA11工程に進む。測定が失敗であればA10工程に進む。
【0089】
A10工程で、警告手段9は警告を出す。警告の形態については実施例1と略同様である。
【0090】
A11工程で、補正手段8は画像補正を行う。ヒストグラムを補正する場合には補正手段8はアライメント時の断層像のヒストグラムに第2断層像取得手段4によって取得した断層像のヒストグラムを近づけるように補正を行う。なお、倍率の補正を行う場合、不足するデータにはノイズレベルを挿入し、余剰データは削除する。また、実施例1と同様に各画素で2次元のγ分布が得られるため、補正手段8はこれに基づきそれぞれのXY座標においてγ補正を行い、最終的な3次元データを得ることができる。
【0091】
A12工程で、終了する。1回の測定は終了であるが、必要に応じてA1から測定を行う。
【0092】
以上説明のように本実施例によれば、複数の測定光を用いることによるOCT装置においても、実施例1と同様の効果を得ることができる。
【0093】
(その他の実施例)
また、本発明は、以下の処理を実行することによっても実現される。即ち、上述した実施形態の機能を実現するソフトウェア(プログラム)を、ネットワーク又は各種記憶媒体を介してシステム或いは装置に供給し、そのシステム或いは装置のコンピュータ(またはCPUやMPU等)がプログラムを読み出して実行する処理である。
【符号の説明】
【0094】
101 光源
102 出射光
103 参照光
104 測定光
105 戻り光
106 合波光
107 シングルモードファイバ
108 光カプラ
109−1,2 レンズ
110 分散補償用ガラス
111 ミラー
112 電動ステージ
113 XYスキャナ
114 レンズ
115 対物レンズ
116 分光器
117 コンピュータ
118 角膜
119 被検眼
120 網膜
【特許請求の範囲】
【請求項1】
被検眼の第1の断層像を取得する第1取得手段と、
前記第1の断層像が取得された後に前記被検眼の3次元像を取得する3次元像取得手段と、
前記3次元像が取得された後に前記第1の断層画像に対応する前記被検眼の第2の断層像を取得する第2取得手段と、
前記第1の断層像の階調に基づいて前記第2の断層像の階調を補正する補正手段と、
を備えることを特徴とする眼科装置。
【請求項2】
前記第2取得手段は前記3次元像から前記第2の断層像を取得することを特徴とする請求項1記載の眼科装置。
【請求項3】
前記第2の断層像は前記被検眼における前記第1の断層像の位置に対応することを特徴とする請求項1または請求項2記載の眼科装置。
【請求項4】
前記補正手段は、前記第2の断層像のヒストグラムと前記第1の断層像のヒストグラムとの差に基づいて前記第2の断層像の階調を補正することを特徴とする請求項1〜3のいずれか記載の眼科装置。
【請求項5】
前記補正手段は、前記第1の断層像のヒストグラムと前記第2の断層像のヒストグラムとの差に基づいて前記3次元像の階調を補正することを特徴とする請求項1〜4のいずれか1項に記載の眼科装置
【請求項6】
前記補正手段は、前記第1の断層像に基づいて前記第2の断層像の倍率を補正することを特徴とする請求項1〜5のいずれか1項に記載の眼科装置。
【請求項7】
アライメント中に取得した前記第1の断層像に基づいてアライメントの状態を判定する第1判定手段を備えることを特徴とする請求項1〜6のいずれか1項に記載の眼科装置。
【請求項8】
前記第1判定手段は、前記第1の断層像のヒストグラムに基づいてアライメントの状態を判定することを特徴とする請求項7記載の眼科装置。
【請求項9】
前記第1判定手段は、複数の領域に分けられた前記第1の断層像の少なくとも2以上の領域におけるヒストグラムに基づいてアライメントの状態を判定することを特徴とする請求項8記載の眼科装置。
【請求項10】
前記第1判定手段は、前記第1の断層像の中心を含む領域に隣接する2つの領域における前記第1の断層像のヒストグラムの差に基づいてアライメントの状態を判定することを特徴とする請求項9記載の眼科装置。
【請求項11】
前記第1の断層像と前記第2の断層像とに基づいて、前記3次元像の測定状態を判定する第2判定手段を備えることを特徴とする請求項7〜10のいずれか1項に記載の眼科装置。
【請求項12】
前記第2判定手段は、前記第1の断層像のヒストグラムと前記第2の断層像のヒストグラムとに基づいて前記3次元像の測定状態を判定することを特徴とする請求項11記載の眼科装置。
【請求項13】
前記第1判定手段によるアライメントの状態の判定結果に基づいて、警告を行う警告手段を備えたことを特徴とする請求項7〜12のいずれか1項に記載の眼科装置。
【請求項14】
前記警告手段は、前記第1判定手段によるアライメントの状態の判定結果に基づいて、警告を示す表示形態を表示部に表示させる表示手段を備えたことを特徴とする請求項13記載の眼科装置。
【請求項15】
前記第2判定手段による前記3次元像の測定状態の判定結果に基づいて、警告を行う警告手段を備えたことを特徴とする請求項11または請求項12記載の眼科装置。
【請求項16】
前記警告手段は、前記第2判定手段による前記3次元像の測定状態の判定結果に基づいて、警告を示す表示形態を表示部に表示させる表示手段を備えたことを特徴とする請求項15記載の眼科装置。
【請求項17】
前記測定光が複数であることを特徴とする請求項1〜16のいずれか1項に記載の眼科装置。
【請求項18】
被検眼の第1の断層像を取得する第1取得手段と、
前記第1の断層像が取得された後に前記被検眼の3次元像を取得する3次元像取得手段と、
前記3次元像が取得された後に前記第1の断層画像に対応する前記被検眼の第2の断層像を取得する第2取得手段と、
前記第1の断層像に基づいて前記第2の断層像の倍率を補正する補正手段と、
を備えることを特徴とする眼科装置。
【請求項19】
被検眼の第1の断層像を取得する第1取得工程と、
前記第1の断層像が取得された後に前記被検眼の3次元像を取得する3次元像取得工程と、
前記3次元像が取得された後に前記第1の断層画像に対応する前記被検眼の第2の断層像を取得する第2取得工程と、
前記第1の断層像の階調に基づいて前記第2の断層像の階調を補正する補正工程と、
を有することを特徴とする眼科用画像処理方法。
【請求項20】
請求項19記載の方法をコンピュータに実行させることを特徴とするプログラム。
【請求項1】
被検眼の第1の断層像を取得する第1取得手段と、
前記第1の断層像が取得された後に前記被検眼の3次元像を取得する3次元像取得手段と、
前記3次元像が取得された後に前記第1の断層画像に対応する前記被検眼の第2の断層像を取得する第2取得手段と、
前記第1の断層像の階調に基づいて前記第2の断層像の階調を補正する補正手段と、
を備えることを特徴とする眼科装置。
【請求項2】
前記第2取得手段は前記3次元像から前記第2の断層像を取得することを特徴とする請求項1記載の眼科装置。
【請求項3】
前記第2の断層像は前記被検眼における前記第1の断層像の位置に対応することを特徴とする請求項1または請求項2記載の眼科装置。
【請求項4】
前記補正手段は、前記第2の断層像のヒストグラムと前記第1の断層像のヒストグラムとの差に基づいて前記第2の断層像の階調を補正することを特徴とする請求項1〜3のいずれか記載の眼科装置。
【請求項5】
前記補正手段は、前記第1の断層像のヒストグラムと前記第2の断層像のヒストグラムとの差に基づいて前記3次元像の階調を補正することを特徴とする請求項1〜4のいずれか1項に記載の眼科装置
【請求項6】
前記補正手段は、前記第1の断層像に基づいて前記第2の断層像の倍率を補正することを特徴とする請求項1〜5のいずれか1項に記載の眼科装置。
【請求項7】
アライメント中に取得した前記第1の断層像に基づいてアライメントの状態を判定する第1判定手段を備えることを特徴とする請求項1〜6のいずれか1項に記載の眼科装置。
【請求項8】
前記第1判定手段は、前記第1の断層像のヒストグラムに基づいてアライメントの状態を判定することを特徴とする請求項7記載の眼科装置。
【請求項9】
前記第1判定手段は、複数の領域に分けられた前記第1の断層像の少なくとも2以上の領域におけるヒストグラムに基づいてアライメントの状態を判定することを特徴とする請求項8記載の眼科装置。
【請求項10】
前記第1判定手段は、前記第1の断層像の中心を含む領域に隣接する2つの領域における前記第1の断層像のヒストグラムの差に基づいてアライメントの状態を判定することを特徴とする請求項9記載の眼科装置。
【請求項11】
前記第1の断層像と前記第2の断層像とに基づいて、前記3次元像の測定状態を判定する第2判定手段を備えることを特徴とする請求項7〜10のいずれか1項に記載の眼科装置。
【請求項12】
前記第2判定手段は、前記第1の断層像のヒストグラムと前記第2の断層像のヒストグラムとに基づいて前記3次元像の測定状態を判定することを特徴とする請求項11記載の眼科装置。
【請求項13】
前記第1判定手段によるアライメントの状態の判定結果に基づいて、警告を行う警告手段を備えたことを特徴とする請求項7〜12のいずれか1項に記載の眼科装置。
【請求項14】
前記警告手段は、前記第1判定手段によるアライメントの状態の判定結果に基づいて、警告を示す表示形態を表示部に表示させる表示手段を備えたことを特徴とする請求項13記載の眼科装置。
【請求項15】
前記第2判定手段による前記3次元像の測定状態の判定結果に基づいて、警告を行う警告手段を備えたことを特徴とする請求項11または請求項12記載の眼科装置。
【請求項16】
前記警告手段は、前記第2判定手段による前記3次元像の測定状態の判定結果に基づいて、警告を示す表示形態を表示部に表示させる表示手段を備えたことを特徴とする請求項15記載の眼科装置。
【請求項17】
前記測定光が複数であることを特徴とする請求項1〜16のいずれか1項に記載の眼科装置。
【請求項18】
被検眼の第1の断層像を取得する第1取得手段と、
前記第1の断層像が取得された後に前記被検眼の3次元像を取得する3次元像取得手段と、
前記3次元像が取得された後に前記第1の断層画像に対応する前記被検眼の第2の断層像を取得する第2取得手段と、
前記第1の断層像に基づいて前記第2の断層像の倍率を補正する補正手段と、
を備えることを特徴とする眼科装置。
【請求項19】
被検眼の第1の断層像を取得する第1取得工程と、
前記第1の断層像が取得された後に前記被検眼の3次元像を取得する3次元像取得工程と、
前記3次元像が取得された後に前記第1の断層画像に対応する前記被検眼の第2の断層像を取得する第2取得工程と、
前記第1の断層像の階調に基づいて前記第2の断層像の階調を補正する補正工程と、
を有することを特徴とする眼科用画像処理方法。
【請求項20】
請求項19記載の方法をコンピュータに実行させることを特徴とするプログラム。
【図1】



【図2】
【図3】
【図4】
【図5】
【図6】
【図7】

【図8】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2013−75035(P2013−75035A)
【公開日】平成25年4月25日(2013.4.25)
【国際特許分類】
【出願番号】特願2011−216776(P2011−216776)
【出願日】平成23年9月30日(2011.9.30)
【出願人】(000001007)キヤノン株式会社 (59,756)
【Fターム(参考)】
【公開日】平成25年4月25日(2013.4.25)
【国際特許分類】
【出願日】平成23年9月30日(2011.9.30)
【出願人】(000001007)キヤノン株式会社 (59,756)
【Fターム(参考)】
[ Back to top ]