
光量調節装置

【課題】 ステッピングモータにおいて、通電を切った時に不安定となる停止位置で通電を切ると、コギングトルクによって、本来の停止位置より、小絞り方向へ1ステップ分ずれるか、開放方向へ1ステップ分ずれるかを特定できない。
結果的に本来の停止位置に対して±1ステップの誤差が生じるため、通電を切った場合には、絞り口径の精度が低くなるという問題点がある。
【解決手段】 遮光羽根の嵌合部を長穴形状で構成することで、1−2相励磁駆動の2相通電時、つまり不安定位置で通電をOFFした時の遮光羽根のばらつき方向を特定する。
結果的に本来の停止位置に対して±1ステップの誤差が生じるため、通電を切った場合には、絞り口径の精度が低くなるという問題点がある。
【解決手段】 遮光羽根の嵌合部を長穴形状で構成することで、1−2相励磁駆動の2相通電時、つまり不安定位置で通電をOFFした時の遮光羽根のばらつき方向を特定する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、カメラ、ビデオカメラ、デジタルカメラ等の撮像装置に用いられる光量調節装置に関するものである。
【背景技術】
【0002】
固体撮像素子を内蔵した撮像装置には、レンズの被写界深度の確認、フイルムや固体撮像素子に結像される被写体の光量を調節するために、開口径を制御する絞り装置(光量調節装置)が設けられている。
【0003】
また、映像を投影するための光学機器にも光量調節装置を有したものもある。これらの光量調節装置は、遮光部材として複数の絞り羽根を用い、ステッピングモータを駆動動力源として開口径を変化させるものが主流となっている。
【0004】
ところで、ステッピングモータを駆動動力源とした光量調節装置においては、ステッピングモータに所定の位相から通電を開始して、ロータを何ステップ回転させるかで絞り口径を決定している。
【0005】
そのため、高い精度で絞り口径を得るためには、1ステップ当りにロータが回転する角度が少ない方が望ましい。
【0006】
一方、電源となる電池の消耗を避けるために、比較的長時間露光を行う場合には、モーターへの通電を切る率が高い方が望ましく、そのためには、コギングトルクによりロータ1回転当りのロータが安定して停止する停止位置が数多くあることが望ましい。
【0007】
一般的なステッピングモータを駆動動力源とした光量調節装置においては、通電を継続した際にロータが停止できる位置の数に対し、通電を切った時にロータがコギングトルクにより安定して停止していられる位置の数は、1/2である。
【0008】
また、通電を切った時に不安定となる停止位置で通電を切ると、コギングトルクによって、本来の停止位置より、小絞り方向へ1ステップ分ずれるか、開放方向へ1ステップ分ずれるかを特定できない。
【0009】
結果的に本来の停止位置に対して±1ステップの誤差が生じるため、通電を切った場合には、絞り口径の精度が低くなるという問題点がある。そのため、比較的長時間の露光を行う場合にも、絞り口径の精度を高く保つためにはコイルへの通電を継続しなければならず、電源となる電池の消耗がはげしいという問題があった。
【0010】
そこで、通電を切った場合にも絞り口径の精度を高く保つための電磁駆動露光量調節装置が提案されている(特許文献1参照)。
【0011】
特許文献1に開示されている手法では、マグネット外周面に磁極中心から所定角度ずれた位置に溝を設けることで、通電を切った時にコギングトルクにより回転させられる方向を特定させることを可能にしている。こうすることで、長時間露光時に電池を消耗させることなく絞り精度を向上させている。
【特許文献1】特開平3−231722号公報
【発明の開示】
【発明が解決しようとする課題】
【0012】
しかしながら、特許文献1に開示の電磁駆動露光量調節装置は、マグネット外周面に溝を設ける必要があり、磁力の高い焼結マグネットやコンプレッションマグネットでは上記のような複雑で精度の求められる形状を作成することは困難である。
【0013】
したがって、上記したマグネットに比べ磁力の低いインジェクションマグネットを使用しなければならないという制約があるため、モータトルクが低いものとなるか、マグネット径を大きくしたりコイル巻数を増やしたりする必要が生じる。その結果として、モータが大型化してしまうといった問題がある。
【0014】
また、マグネット外周面に溝を設けると、コギングトルクが増大するため、低い電圧での作動を保証するためには、よりコイルを大型化しなければならず、さらに、駆動音もかなり大きなものになるという問題もあった。
【0015】
本発明は上記問題点を鑑みてなされたものであり、小型で駆動音が小さく、エネルギーロスの少なく、且つ高い絞り口径精度を得ることのできる光量調節装置を提供することを目的とする。
【課題を解決するための手段】
【0016】
上記目的を達成するため、本発明の光量調節装置は、複数枚の遮光羽根と、前記遮光羽根の動きを規制するカムを有するカム部材と、回転動作をすることで前記遮光羽根を所定の絞り径となる絞り位置まで駆動する回転手段と、前記回転手段を駆動するステッピングモータとを備えた光量調節装置において、前記回転手段は前記遮光羽根に設けられた軸が嵌合する穴部を有し、前記穴部の前記遮光羽根の駆動方向への長さが、前記軸の直径と前記穴部における前記ステッピングモータによる1ステップの移動量を足した長さよりも長いことを特徴とする。
【発明の効果】
【0017】
本発明によれば、小型で駆動音が小さく、エネルギーロスの少なく、且つ高い絞り口径精度を得ることのできる光量調節装置を提供できる。
【発明を実施するための最良の形態】
【0018】
以下、添付図面を参照して本発明を実施するための最良の形態を詳細に説明する。ただし、本形態において例示される構成部品の寸法、形状、それらの相対配置などは、本発明が適用される装置の構成や各種条件により適宜変更されるべきものであり、本発明がそれらの例示に限定されるものではない。
【0019】
<第1の実施形態>
本発明の第1の実施形態について説明する。図1は本実施形態に係る光量調節装置の分解斜視図である。図2は本実施形態の光量調節装置における遮光羽根と回転部材とカム部材との位置関係を表す図である。図3は本実施形態の光量調節装置における回転部材に設けられた長穴の拡大図である。
【0020】
図1において、1〜7は光量調節部材としての遮光羽根である。これらの複数枚の遮光羽根は、遮光性を有し開口量を規制する第1基部1a〜7aと、同じく遮光性を有し開口量を規制する第2基部1b〜7bとからなる薄板状の羽根基部を有する。
【0021】
そして、薄板状の羽根基部と、第1基部1a〜7aの一方の面に設けられる円柱或いは円筒状の第1軸部1c〜7cと、第1基部1a〜7aの他方の面に設けられる円柱或いは円筒状の第2軸部1d〜7d(一部不図示)とが一体で形成されている。
【0022】
また、第1基部1a〜7a、第2基部1b〜7b、円柱或いは円筒状の第1軸部1c〜7c、円柱或いは円筒状の第2軸部1d〜7dは全て合成樹脂により一体成型される。
【0023】
8は遮光羽根1〜7の開閉手段としての回転部材であり、回転部材8は中央に開口部8aが形成されたリング状に形成され、長穴部8b〜8hと、回転嵌合突起部8iと、ギア部8jが設けられている。
【0024】
また、回転部材8は遮光部8kを備える。長穴部の形状については後ほど詳細に説明する。
【0025】
9は中央に開口部9aが形成されたリング状のカム部材であり、カム部材9にはカム溝部9b〜9hが設けられている。
【0026】
10は中央に開口部10aが形成されたリング状の押え部材であり、押え部材10には穴部10bと、モータ取り付け部10cが設けられている。
【0027】
11は回転部材8を駆動するステッピングモータであり、ステッピングモータ11の軸先端にはピニオンギア12が固定されており、押え部材10のモータ撮り付け部10cに取り付けられる。
【0028】
その際、ピニオンギア12は押え部材10の穴部10bを貫通して回転部材8のギア部8jと噛み合う。ステッピングモータ11は一般的な2つのコイルを備える2相のステッピングモータであり、本実施形態の光量調節装置におけるステッピングモータの駆動方式は1−2相励磁となる。
【0029】
13は初期位置センサーであり、回転部材8に設けられる遮光部8kの初期位置センサーへの挿入、退避状態を検知することで、回転部材8が初期位置状態にあるかどうかを検知する。
【0030】
押え部材10は回転部材8と遮光羽根1〜7を間に挟んでカム部材9に固定され、回転部材8と遮光羽根1〜7の光軸方向の抜け止めの役割を果たす。その際、回転部材8の回転嵌合突起部8iは押え部材10の開口部10aに嵌合して回転可能に支持される。また遮光羽根1〜7の第1軸部1c〜7cは回転部材8の長穴部8b〜8hにそれぞれ回動可能に嵌合しており、第2軸部1d〜7dはカム部材9のカム溝部9b〜9hにそれぞれ摺動可能に嵌合している。
【0031】
遮光羽根1〜7は光軸を中心に円周方向に均等配置されて、遮光性を有する第1基部1a〜7a及び第2基部1b〜7bが重ね合わされることで絞り開口を制御可能となり、重ね合わせが大きいほど絞り開口量は小さくなる。
【0032】
ここで、回転部材8における遮光羽根1〜7が接触する面(図1の下面)の表面摩擦係数をμDとし、カム部材9における遮光羽根1〜7が接触する面9iの表面摩擦係数をμEとすると、μE>μDに設定されている。その理由は後述する。
【0033】
以上により、光量調節装置が構成される。
ここで、図3を用いて、回転部材の長穴部形状について詳細に説明する。
【0034】
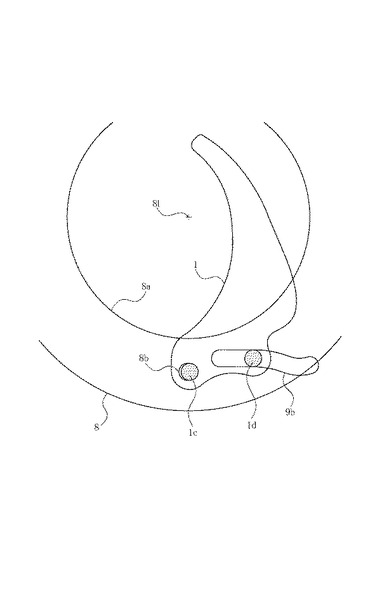
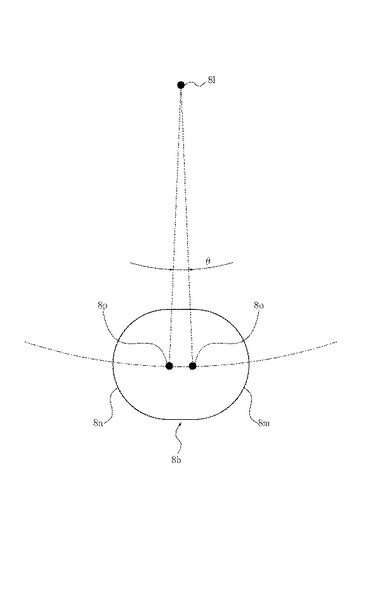
図3は回転部材8に設けられた長穴部の1つである長穴部8bの拡大図である。図のように長穴部8bは、8oを中心としたR部8mと8pを中心としたR部8nとを結んだ長穴形状に形成される。中心8oと中心8pは回転部材8の回転中心である8lから等距離の位置にある。R部8mの半径及びR部8nの半径は遮光羽根1の第1軸部1cの半径とほぼ等しい値に設定され(部品公差分だけR部のほうが大きい)、これら2つのR部中心8o、8pと回転部材8の回転中心である8lとのなす角θは以下の式で設定される。ここでいう部品公差とは、部品製造時の製造誤差のことである。
【0035】
θ=360/4N*Z1/Z2
N:ステッピングモータ11のマグネット着磁極数
Z1:ピニオンギア12の歯数
Z2:回転部材8のギア部8jの歯数
ここで、θはステッピングモータ11の1−2相励磁駆動における1ステップ駆動時の回転部材8の回転角に相当する。
【0036】
つまり、本発明における長穴部の駆動方向の長さは、第1軸部の直径とステッピングモータ11の1−2相励磁駆動における1ステップ駆動時の第1軸部の駆動方向への移動量と部品公差分を足した長さになる。
【0037】
なお、残りの長穴部8c〜8hも同様の形状となる。
【0038】
次に図4を用いて本実施形態による光量調節装置の駆動源となるステッピングモータ11のコギングトルクについて説明する。
【0039】
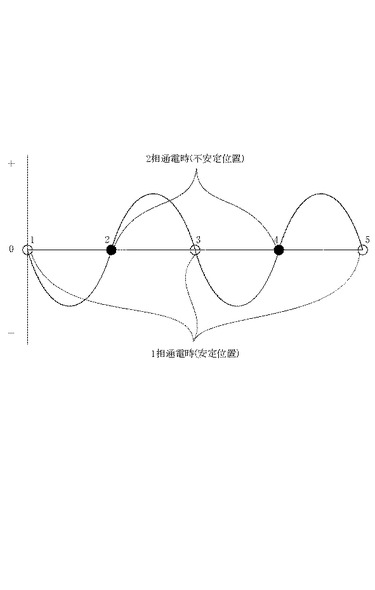
図4は本実施形態のステッピングモータ1のコギングトルクを表す図であり、一般的な2つのコイルを備えた2相のステッピングモータも同様となる。
【0040】
図4において横軸はステッピングモータのステップ位置を示し、縦軸はトルク値を表す。サインカーブで示される実線がコギングトルク曲線であり、ステップ1、3、5は1−2相励磁時の1相通電時(片方のコイルに通電)の位置であり、ステップ2、4は1−2相励磁時の2相通電時(両方のコイルに通電)の位置である。
【0041】
ステップ1、3、5の位置はその位置から左右に少しずれてもコギングトルクにより元の位置に戻る力が働く安定位置である。ステップ2、4の位置はその位置から左右に少しずれただけでコギングトルクにより1ステップ進むか1ステップ戻る力が働く不安定位置である。
【0042】
すなわち、モータを1相通電後に通電をOFFすると、コギングトルクによりその位置に留まる力が働く。しかし、モータを2相通電後に通電をOFFすると、その位置に止まる場合はごく稀で、コギングトルクにより1ステップ進むか1ステップ戻る位置で止まる場合が多い。これは、モータの回転精度により通電ON時の停止位置にバラツキが生じることによるものである。
【0043】
次に本実施形態の光量調節装置の動作を説明する。
【0044】
回転部材8の初期位置状態を検知する初期位置センサー13により、遮光羽根1〜7の初期位置状態の検知を行う。ここでいう、遮光羽根1〜7の初期位置とは、遮光羽根1〜7が全開になった状態のことをさす。
【0045】
初期位置状態が検知されると、所定の絞り位置に応じてステッピングモータ11を制御する制御手段により、任意の絞り位置までステッピングモータ11を1−2相駆動させる。
【0046】
ステッピングモータ11を反時計回り方向に回転させることでピニオンギア12が回転し、ピニオンギア12は回転部材8のギア部8jに噛み合っているので回転部材8は時計回り方向に回転する。
【0047】
回転部材8の長穴部8b〜8hには遮光羽根1〜7の第1軸部1c〜7cが嵌合しているので、遮光羽根1〜7はそれぞれ第1軸部1c〜7cが動かされることで、第2軸部1d〜7dがカム部材9のカム溝部9b〜9hに沿って移動する。
【0048】
この時、回転部材8の長穴部8b〜8hと遮光羽根1〜7の第1軸部1c〜7cとの関係は、図2のように第1軸部1cが長穴部8bの右端R部に当接して駆動され、他の遮光羽根も同様に駆動される。そして、カム部材9の開口部9aの一部を覆うように、遮光羽根1〜7が回転動作をすることで所定の絞り径となる絞り位置まで、遮光羽根1〜7は駆動される。
【0049】
遮光羽根を所定の絞り位置から初期位置状態に戻す時は、ステッピングモータ11を制御する制御手段により、ステッピングモータ11を時計回り方向に駆動させる。
【0050】
その際、遮光羽根を初期位置から所定の絞り位置に駆動させる時のステッピングモータ11の駆動ステップ数をFとし、所定の絞り位置から初期位置に戻す時の駆動ステップ数をGとすると、制御手段によりF<Gと制御される。
【0051】
すなわち、所定の絞り位置から初期位置に戻す時のステップ数を多くする。
【0052】
これにより、遮光羽根1〜7が嵌合する回転部材8の長穴部8b〜8hが駆動方向に長穴形状になっていても、初期位置に戻る時は長穴部8b〜8hと第1軸部1cとの隙間を吸収する分は動かされる。つまり、遮光羽根1〜7は初期位置に安定して戻ることができる。
【0053】
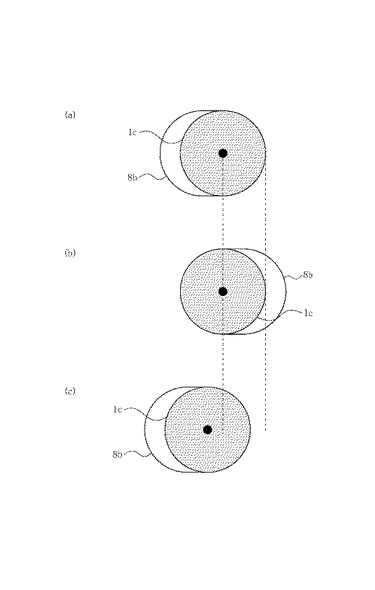
ここで、図5を用いて、回転部材に設けられた長穴と遮光羽根に設けられた第1軸部との位置関係を説明する。
図5(a)はステッピングモータ11の通電がON状態である時の長穴8bと第1軸部1cとの位置関係を表している。
図5(b)はステッピングモータ11の通電をOFFした時にステッピングモータ11のコギングトルクにより回転部材8が戻り方向に1ステップ分回転移動した時の長穴8bと第1軸部1cとの位置関係を表している。
図5(c)はステッピングモータ11の通電をOFFした時にステッピングモータ11のコギングトルクにより回転部材8が進み方向に1ステップ分回転移動した時の長穴8bと第1軸部1cとの位置関係を表している。
【0054】
図5(a)のように、ステッピングモータ11の通電がON状態である時、第1軸部1cは長穴8bの右端に当接している。このように、初期位置から所定の絞り位置までの駆動中及び駆動後の通電ON状態では、遮光羽根1〜7の第1軸部1c〜7cは回転部材8の長穴8b〜8hの移動方向とは逆側の端面に当接する。
【0055】
次に、遮光羽根が初期位置から所定の絞り位置まで駆動した後、1−2相励磁駆動の2相通電時のような不安定位置でステッピングモータ11の通電をOFFした場合は、図5(b)或いは図5(c)に示すような状態になる。
【0056】
つまり、回転部材8はステッピングモータ11のコギングトルクにより1ステップ分進み方向、又は戻り方向に移動させられるが、その方向は特定されない。
【0057】
図5(b)に示すように、ステッピングモータ11の通電をOFFした時にステッピングモータ11のコギングトルクにより回転部材8が戻り方向に1ステップ分回転移動した時は、第1軸部1cは長穴8bの左端に当接する。従って、第1軸部1c自体は移動しない。これは、長穴8bに第1軸部1cが嵌合している状態で移動方向に隙間が1ステップ分設けてあるからである。
【0058】
ここで、前述したように、回転部材8の遮光羽根1〜7が接触する面の表面摩擦係数μDをカム部材9の遮光羽根1〜7が接触する面9iの表面摩擦係数をμEよりも小さく設定している。従って、回転部材8の駆動時に遮光羽根1〜7が回転部材8との摩擦により動かされる力よりも遮光羽根1〜7がカム部材9との摩擦によりカム部材9に張り付こうとする力の方が大きくなる。その結果、ステッピングモータ11の通電をOFFした時に、回転部材8がステッピングモータ11のコギングトルクにより1STEP分逆方向に戻されても、遮光羽根1〜7は動かされない。
【0059】
図5(c)に示すのように、ステッピングモータ11の通電をOFFした時にステッピングモータ11のコギングトルクにより回転部材8が進み方向に1ステップ分回転移動した時は、第1軸部1cは長穴8bの右端に当接する。それと同時に、第1軸部1cも進み方向に1ステップ分回転移動する。
【0060】
以上のように、遮光羽根が初期位置から所定の絞り位置まで駆動した後、1−2相励磁駆動の2相通電時にステッピングモータ11の通電をOFFした場合は、回転部材8はステッピングモータ11のコギングトルクにより1ステップ分移動させられる。この時、その移動方向は特定されないが、遮光羽根1〜7は進み方向に移動するときのみ移動し、戻り方向に移動する時は移動しないため、絞り口径を決める遮光羽根自体の移動方向は特定されることになる。
【0061】
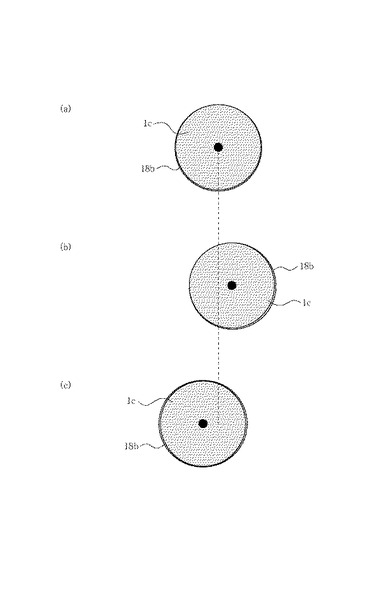
従来、回転部材に設けられる遮光羽根の嵌合部は第1軸部と同径の円で構成していたため、通電OFF時には回転部材の移動とともに遮光羽根も移動し、その移動方向は特定できなかった。
【0062】
図8は従来の光量調節装置における回転部材に設けられた丸穴と遮光羽根に設けられた第1軸部との位置関係を表す図である。
【0063】
従来の光量調節装置は本発明の光量調節装置とは回転部材が異なるが、他の構成要素は本発明のものと同一となるので、同一符号を記して説明は省略する。
【0064】
図8(a)はステッピングモータ11の通電がON状態である時の丸穴18bと第1軸部1cとの位置関係を表している。
【0065】
図8(b)はステッピングモータ11の通電をOFFした時にステッピングモータ11のコギングトルクにより回転部材18が戻り方向に1ステップ分回転移動した時の丸穴18bと第1軸部1cとの位置関係を表している。
【0066】
図8(c)はステッピングモータ11の通電をOFFした時にステッピングモータ11のコギングトルクにより回転部材18が進み方向に1ステップ分回転移動した時の丸穴8bと第1軸部1cとの位置関係を表している。
【0067】
図8(a)の状態と比べて図8(b)の状態は、回転部材18が戻り方向に1ステップ分回転移動するとともに、第1軸部1cも戻り方向に1ステップ分回転移動している。
【0068】
また、図8(a)の状態と比べて図8(c)の状態は、回転部材18が進み方向に1ステップ分回転移動するとともに、第1軸部1cも進み方向に1ステップ分回転移動している。
【0069】
すなわち、遮光羽根が初期位置から所定の絞り位置まで駆動した後、1−2相励磁駆動の2相通電時にステッピングモータ11の通電をOFFした場合は、以下のような動きになる。つまり、回転部材18は遮光羽根1〜7とともにステッピングモータ11のコギングトルクにより1ステップ分移動させられ、その方向は特定されないのである。
【0070】
図6は、回転部材に設けられる遮光羽根の嵌合部が第1軸部と同径の円で構成されている場合の光量調節装置のモータ駆動における絞り口径精度を示している。
【0071】
図6(a)は従来の回転部材に設けられる遮光羽根の嵌合部が第1軸部と同径の円で構成している場合の光量調節装置のモータ駆動における絞り口径精度を表す図である。
【0072】
図6(b)は本実施形態の回転部材に設けられる遮光羽根の嵌合部が第1軸部と同径の円で構成している場合の光量調節装置のモータ駆動における絞り口径精度を表す図である。
なお、ここで言う口径精度とは本来のステップ数における開口径と実際の開口径との差分がどの程度のものかを示した数値である。
【0073】
図6(a)に示すように、回転部材に設けられる遮光羽根の嵌合部を第1軸部と同径の円で構成した場合、1−2相励磁駆動の1相通電時に相当する奇数のステップ位置では通電ON(点線)と通電OFF(実線)の口径精度の差はほとんどない。
【0074】
しかし、1−2相励磁駆動の2相通電時に相当する偶数のステップ位置では通電OFFした場合に口径精度のばらつきが発生しており、その方向性は+側(戻り方向)−側(進み方向)のどちらにも発生している。
【0075】
一方、図6(b)に示すように回転部材に設けられる遮光羽根の嵌合部を長穴形状で構成した場合は、図6(a)に示した従来例の構造と同じく、1−2相励磁駆動の1相通電時に相当する奇数ステップ位置で通電ONと通電OFFの口径精度の差はほとんどない。
【0076】
しかし、図6(b)に示した本発明の構成においては、1−2相励磁駆動の2相通電時に相当する偶数のステップ位置で通電OFFした場合の口径精度のばらつきは−側(進み方向)のみに発生している。
【0077】
したがって、トータルで見た場合の口径精度のばらつき幅は、従来例の光量調整装置に比べて、本発明の光量調節装置では約半分になっており、通電OFF時の口径精度が向上しているのがわかる。
【0078】
このように、本発明の光量調節装置では、1−2相励磁駆動の2相通電時、つまり不安定位置で通電をOFFした時の遮光羽根のばらつき方向を特定できるので、通電OFF時の絞り口径精度が向上するため、長時間露光時に通電を切ることができる。
【0079】
また、長時間露光時に通電を切ることができるので、電力消費を減らすことが可能になる。
【0080】
なお、本実施形態では回転部材8の長穴部8b〜8hの2つのR部中心8o、8pと回転部材8の回転中心である8lとのなす角θを
θ=360/4N*Z1/Z2
と設定したが、θ>360/4N*Z1/Z2と設定しても、本発明の効果は同様のものとなる。
【0081】
<第2の実施形態>
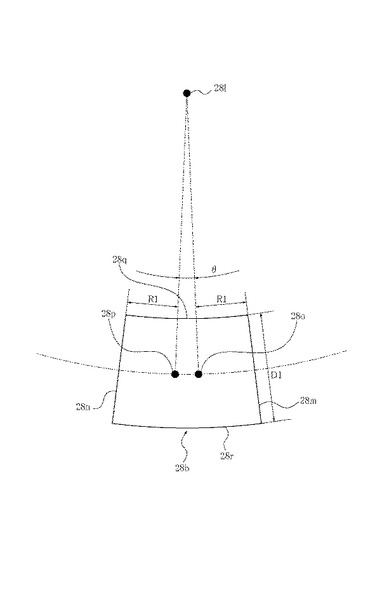
図7は第2の実施形態における回転部材に設けられた長穴部の1つの拡大図である。
【0082】
本実施形態における光量調節装置は第1の実施形態とは回転部材の長穴部形状のみが異なり、その他の構成要素は同一であるので、説明は省略する。
【0083】
図7における、長穴部28bは、28oからR1の距離にある端部28mと、28pからR1の距離にある端部28nと、回転部材8の回転中心28lを中心としたR部28qと28rとからなる長穴形状に形成される。
【0084】
8oと8pは回転部材28の回転中心である28lから等距離の位置にある。
【0085】
R部28qとR部28rとの距離D1は遮光羽根1の第1軸部1cの直径とほぼ等しい値に設定され(部品公差分D1のほうが大きい)、R1は遮光羽根1の第1軸部1cの半径とほぼ等しい値に設定される。
【0086】
28lから28oを結んだ線と端部28mは平行状態にあり、28lから28pを結んだ線と端部28nは平行状態にある。また、28o、28pと回転部材28の回転中心である28lとのなす角θは以下の式で設定される。
【0087】
θ=360/4N*Z1/Z2
N:ステッピングモータ11のマグネット着磁極数
Z1:ピニオンギア12の歯数
Z2:回転部材28のギア部28jの歯数
ここで、θはステッピングモータ11の1−2相励磁駆動における1ステップ駆動時の回転部材28の回転角に相当する。
【0088】
不図示の他の長穴部28c〜28hも同様の形状となる。
【0089】
回転部材28の長穴部を上記のような形状にすることで、本実施形態においても、第1の実施形態と同様の効果が得られる。
【0090】
つまり、遮光羽根が初期位置から所定の絞り位置まで駆動した後、1−2相励磁駆動の2相通電時にステッピングモータ11の通電をOFFした場合は、回転部材28はステッピングモータ11のコギングトルクにより1ステップ分移動させられる。この時、その移動方向は特定されないが、遮光羽根1〜7は進み方向に移動するときのみ移動し、戻り方向に移動する時は移動しないため、絞り口径を決める遮光羽根自体の移動方向は特定されることになる。
【0091】
なお、本実施形態では回転部材28の長穴部28b〜28hに設定される角θを
θ=360/4N*Z1/Z2
と設定したが、θ>360/4N*Z1/Z2と設定しても、本発明の効果は同様のものとなる。
【図面の簡単な説明】
【0092】
【図1】第1の実施形態に係る光量調節装置の分解斜視図である。
【図2】第1の実施形態の光量調節装置における遮光羽根と回転部材とカム部材との位置関係を表す図である。
【図3】第1の実施形態の光量調節装置における回転部材に設けられた長穴の拡大図である。
【図4】第1の実施形態のステッピングモータのコギングトルクを表す図である。
【図5】第1の実施形態の回転部材に設けられた長穴と遮光羽根に設けられた第1軸部との位置関係を示した図である。
【図6】回転部材に設けられる遮光羽根の嵌合部が第1軸部と同径の円で構成されている場合の光量調節装置のモータ駆動における絞り口径精度を示した図である。
【図7】第2の実施形態における回転部材に設けられた長穴部の1つの拡大図である。
【図8】従来の光量調節装置における回転部材に設けられた丸穴と遮光羽根に設けられた第1軸部との位置関係を表す図である。
【符号の説明】
【0093】
1〜7 遮光羽根
1a〜7a 第1基部
1b〜7b 第2基部
1c〜6c 第1軸部
1d〜6d 第2軸部
8 回転部材
8b〜8h 長穴部
28b 長穴部
8i ギア部
9 カム部材
9b〜9h カム溝部
10 押え部材
11 ステッピングモータ
12 ピニオンギア
13 初期位置センサー
【技術分野】
【0001】
本発明は、カメラ、ビデオカメラ、デジタルカメラ等の撮像装置に用いられる光量調節装置に関するものである。
【背景技術】
【0002】
固体撮像素子を内蔵した撮像装置には、レンズの被写界深度の確認、フイルムや固体撮像素子に結像される被写体の光量を調節するために、開口径を制御する絞り装置(光量調節装置)が設けられている。
【0003】
また、映像を投影するための光学機器にも光量調節装置を有したものもある。これらの光量調節装置は、遮光部材として複数の絞り羽根を用い、ステッピングモータを駆動動力源として開口径を変化させるものが主流となっている。
【0004】
ところで、ステッピングモータを駆動動力源とした光量調節装置においては、ステッピングモータに所定の位相から通電を開始して、ロータを何ステップ回転させるかで絞り口径を決定している。
【0005】
そのため、高い精度で絞り口径を得るためには、1ステップ当りにロータが回転する角度が少ない方が望ましい。
【0006】
一方、電源となる電池の消耗を避けるために、比較的長時間露光を行う場合には、モーターへの通電を切る率が高い方が望ましく、そのためには、コギングトルクによりロータ1回転当りのロータが安定して停止する停止位置が数多くあることが望ましい。
【0007】
一般的なステッピングモータを駆動動力源とした光量調節装置においては、通電を継続した際にロータが停止できる位置の数に対し、通電を切った時にロータがコギングトルクにより安定して停止していられる位置の数は、1/2である。
【0008】
また、通電を切った時に不安定となる停止位置で通電を切ると、コギングトルクによって、本来の停止位置より、小絞り方向へ1ステップ分ずれるか、開放方向へ1ステップ分ずれるかを特定できない。
【0009】
結果的に本来の停止位置に対して±1ステップの誤差が生じるため、通電を切った場合には、絞り口径の精度が低くなるという問題点がある。そのため、比較的長時間の露光を行う場合にも、絞り口径の精度を高く保つためにはコイルへの通電を継続しなければならず、電源となる電池の消耗がはげしいという問題があった。
【0010】
そこで、通電を切った場合にも絞り口径の精度を高く保つための電磁駆動露光量調節装置が提案されている(特許文献1参照)。
【0011】
特許文献1に開示されている手法では、マグネット外周面に磁極中心から所定角度ずれた位置に溝を設けることで、通電を切った時にコギングトルクにより回転させられる方向を特定させることを可能にしている。こうすることで、長時間露光時に電池を消耗させることなく絞り精度を向上させている。
【特許文献1】特開平3−231722号公報
【発明の開示】
【発明が解決しようとする課題】
【0012】
しかしながら、特許文献1に開示の電磁駆動露光量調節装置は、マグネット外周面に溝を設ける必要があり、磁力の高い焼結マグネットやコンプレッションマグネットでは上記のような複雑で精度の求められる形状を作成することは困難である。
【0013】
したがって、上記したマグネットに比べ磁力の低いインジェクションマグネットを使用しなければならないという制約があるため、モータトルクが低いものとなるか、マグネット径を大きくしたりコイル巻数を増やしたりする必要が生じる。その結果として、モータが大型化してしまうといった問題がある。
【0014】
また、マグネット外周面に溝を設けると、コギングトルクが増大するため、低い電圧での作動を保証するためには、よりコイルを大型化しなければならず、さらに、駆動音もかなり大きなものになるという問題もあった。
【0015】
本発明は上記問題点を鑑みてなされたものであり、小型で駆動音が小さく、エネルギーロスの少なく、且つ高い絞り口径精度を得ることのできる光量調節装置を提供することを目的とする。
【課題を解決するための手段】
【0016】
上記目的を達成するため、本発明の光量調節装置は、複数枚の遮光羽根と、前記遮光羽根の動きを規制するカムを有するカム部材と、回転動作をすることで前記遮光羽根を所定の絞り径となる絞り位置まで駆動する回転手段と、前記回転手段を駆動するステッピングモータとを備えた光量調節装置において、前記回転手段は前記遮光羽根に設けられた軸が嵌合する穴部を有し、前記穴部の前記遮光羽根の駆動方向への長さが、前記軸の直径と前記穴部における前記ステッピングモータによる1ステップの移動量を足した長さよりも長いことを特徴とする。
【発明の効果】
【0017】
本発明によれば、小型で駆動音が小さく、エネルギーロスの少なく、且つ高い絞り口径精度を得ることのできる光量調節装置を提供できる。
【発明を実施するための最良の形態】
【0018】
以下、添付図面を参照して本発明を実施するための最良の形態を詳細に説明する。ただし、本形態において例示される構成部品の寸法、形状、それらの相対配置などは、本発明が適用される装置の構成や各種条件により適宜変更されるべきものであり、本発明がそれらの例示に限定されるものではない。
【0019】
<第1の実施形態>
本発明の第1の実施形態について説明する。図1は本実施形態に係る光量調節装置の分解斜視図である。図2は本実施形態の光量調節装置における遮光羽根と回転部材とカム部材との位置関係を表す図である。図3は本実施形態の光量調節装置における回転部材に設けられた長穴の拡大図である。
【0020】
図1において、1〜7は光量調節部材としての遮光羽根である。これらの複数枚の遮光羽根は、遮光性を有し開口量を規制する第1基部1a〜7aと、同じく遮光性を有し開口量を規制する第2基部1b〜7bとからなる薄板状の羽根基部を有する。
【0021】
そして、薄板状の羽根基部と、第1基部1a〜7aの一方の面に設けられる円柱或いは円筒状の第1軸部1c〜7cと、第1基部1a〜7aの他方の面に設けられる円柱或いは円筒状の第2軸部1d〜7d(一部不図示)とが一体で形成されている。
【0022】
また、第1基部1a〜7a、第2基部1b〜7b、円柱或いは円筒状の第1軸部1c〜7c、円柱或いは円筒状の第2軸部1d〜7dは全て合成樹脂により一体成型される。
【0023】
8は遮光羽根1〜7の開閉手段としての回転部材であり、回転部材8は中央に開口部8aが形成されたリング状に形成され、長穴部8b〜8hと、回転嵌合突起部8iと、ギア部8jが設けられている。
【0024】
また、回転部材8は遮光部8kを備える。長穴部の形状については後ほど詳細に説明する。
【0025】
9は中央に開口部9aが形成されたリング状のカム部材であり、カム部材9にはカム溝部9b〜9hが設けられている。
【0026】
10は中央に開口部10aが形成されたリング状の押え部材であり、押え部材10には穴部10bと、モータ取り付け部10cが設けられている。
【0027】
11は回転部材8を駆動するステッピングモータであり、ステッピングモータ11の軸先端にはピニオンギア12が固定されており、押え部材10のモータ撮り付け部10cに取り付けられる。
【0028】
その際、ピニオンギア12は押え部材10の穴部10bを貫通して回転部材8のギア部8jと噛み合う。ステッピングモータ11は一般的な2つのコイルを備える2相のステッピングモータであり、本実施形態の光量調節装置におけるステッピングモータの駆動方式は1−2相励磁となる。
【0029】
13は初期位置センサーであり、回転部材8に設けられる遮光部8kの初期位置センサーへの挿入、退避状態を検知することで、回転部材8が初期位置状態にあるかどうかを検知する。
【0030】
押え部材10は回転部材8と遮光羽根1〜7を間に挟んでカム部材9に固定され、回転部材8と遮光羽根1〜7の光軸方向の抜け止めの役割を果たす。その際、回転部材8の回転嵌合突起部8iは押え部材10の開口部10aに嵌合して回転可能に支持される。また遮光羽根1〜7の第1軸部1c〜7cは回転部材8の長穴部8b〜8hにそれぞれ回動可能に嵌合しており、第2軸部1d〜7dはカム部材9のカム溝部9b〜9hにそれぞれ摺動可能に嵌合している。
【0031】
遮光羽根1〜7は光軸を中心に円周方向に均等配置されて、遮光性を有する第1基部1a〜7a及び第2基部1b〜7bが重ね合わされることで絞り開口を制御可能となり、重ね合わせが大きいほど絞り開口量は小さくなる。
【0032】
ここで、回転部材8における遮光羽根1〜7が接触する面(図1の下面)の表面摩擦係数をμDとし、カム部材9における遮光羽根1〜7が接触する面9iの表面摩擦係数をμEとすると、μE>μDに設定されている。その理由は後述する。
【0033】
以上により、光量調節装置が構成される。
ここで、図3を用いて、回転部材の長穴部形状について詳細に説明する。
【0034】
図3は回転部材8に設けられた長穴部の1つである長穴部8bの拡大図である。図のように長穴部8bは、8oを中心としたR部8mと8pを中心としたR部8nとを結んだ長穴形状に形成される。中心8oと中心8pは回転部材8の回転中心である8lから等距離の位置にある。R部8mの半径及びR部8nの半径は遮光羽根1の第1軸部1cの半径とほぼ等しい値に設定され(部品公差分だけR部のほうが大きい)、これら2つのR部中心8o、8pと回転部材8の回転中心である8lとのなす角θは以下の式で設定される。ここでいう部品公差とは、部品製造時の製造誤差のことである。
【0035】
θ=360/4N*Z1/Z2
N:ステッピングモータ11のマグネット着磁極数
Z1:ピニオンギア12の歯数
Z2:回転部材8のギア部8jの歯数
ここで、θはステッピングモータ11の1−2相励磁駆動における1ステップ駆動時の回転部材8の回転角に相当する。
【0036】
つまり、本発明における長穴部の駆動方向の長さは、第1軸部の直径とステッピングモータ11の1−2相励磁駆動における1ステップ駆動時の第1軸部の駆動方向への移動量と部品公差分を足した長さになる。
【0037】
なお、残りの長穴部8c〜8hも同様の形状となる。
【0038】
次に図4を用いて本実施形態による光量調節装置の駆動源となるステッピングモータ11のコギングトルクについて説明する。
【0039】
図4は本実施形態のステッピングモータ1のコギングトルクを表す図であり、一般的な2つのコイルを備えた2相のステッピングモータも同様となる。
【0040】
図4において横軸はステッピングモータのステップ位置を示し、縦軸はトルク値を表す。サインカーブで示される実線がコギングトルク曲線であり、ステップ1、3、5は1−2相励磁時の1相通電時(片方のコイルに通電)の位置であり、ステップ2、4は1−2相励磁時の2相通電時(両方のコイルに通電)の位置である。
【0041】
ステップ1、3、5の位置はその位置から左右に少しずれてもコギングトルクにより元の位置に戻る力が働く安定位置である。ステップ2、4の位置はその位置から左右に少しずれただけでコギングトルクにより1ステップ進むか1ステップ戻る力が働く不安定位置である。
【0042】
すなわち、モータを1相通電後に通電をOFFすると、コギングトルクによりその位置に留まる力が働く。しかし、モータを2相通電後に通電をOFFすると、その位置に止まる場合はごく稀で、コギングトルクにより1ステップ進むか1ステップ戻る位置で止まる場合が多い。これは、モータの回転精度により通電ON時の停止位置にバラツキが生じることによるものである。
【0043】
次に本実施形態の光量調節装置の動作を説明する。
【0044】
回転部材8の初期位置状態を検知する初期位置センサー13により、遮光羽根1〜7の初期位置状態の検知を行う。ここでいう、遮光羽根1〜7の初期位置とは、遮光羽根1〜7が全開になった状態のことをさす。
【0045】
初期位置状態が検知されると、所定の絞り位置に応じてステッピングモータ11を制御する制御手段により、任意の絞り位置までステッピングモータ11を1−2相駆動させる。
【0046】
ステッピングモータ11を反時計回り方向に回転させることでピニオンギア12が回転し、ピニオンギア12は回転部材8のギア部8jに噛み合っているので回転部材8は時計回り方向に回転する。
【0047】
回転部材8の長穴部8b〜8hには遮光羽根1〜7の第1軸部1c〜7cが嵌合しているので、遮光羽根1〜7はそれぞれ第1軸部1c〜7cが動かされることで、第2軸部1d〜7dがカム部材9のカム溝部9b〜9hに沿って移動する。
【0048】
この時、回転部材8の長穴部8b〜8hと遮光羽根1〜7の第1軸部1c〜7cとの関係は、図2のように第1軸部1cが長穴部8bの右端R部に当接して駆動され、他の遮光羽根も同様に駆動される。そして、カム部材9の開口部9aの一部を覆うように、遮光羽根1〜7が回転動作をすることで所定の絞り径となる絞り位置まで、遮光羽根1〜7は駆動される。
【0049】
遮光羽根を所定の絞り位置から初期位置状態に戻す時は、ステッピングモータ11を制御する制御手段により、ステッピングモータ11を時計回り方向に駆動させる。
【0050】
その際、遮光羽根を初期位置から所定の絞り位置に駆動させる時のステッピングモータ11の駆動ステップ数をFとし、所定の絞り位置から初期位置に戻す時の駆動ステップ数をGとすると、制御手段によりF<Gと制御される。
【0051】
すなわち、所定の絞り位置から初期位置に戻す時のステップ数を多くする。
【0052】
これにより、遮光羽根1〜7が嵌合する回転部材8の長穴部8b〜8hが駆動方向に長穴形状になっていても、初期位置に戻る時は長穴部8b〜8hと第1軸部1cとの隙間を吸収する分は動かされる。つまり、遮光羽根1〜7は初期位置に安定して戻ることができる。
【0053】
ここで、図5を用いて、回転部材に設けられた長穴と遮光羽根に設けられた第1軸部との位置関係を説明する。
図5(a)はステッピングモータ11の通電がON状態である時の長穴8bと第1軸部1cとの位置関係を表している。
図5(b)はステッピングモータ11の通電をOFFした時にステッピングモータ11のコギングトルクにより回転部材8が戻り方向に1ステップ分回転移動した時の長穴8bと第1軸部1cとの位置関係を表している。
図5(c)はステッピングモータ11の通電をOFFした時にステッピングモータ11のコギングトルクにより回転部材8が進み方向に1ステップ分回転移動した時の長穴8bと第1軸部1cとの位置関係を表している。
【0054】
図5(a)のように、ステッピングモータ11の通電がON状態である時、第1軸部1cは長穴8bの右端に当接している。このように、初期位置から所定の絞り位置までの駆動中及び駆動後の通電ON状態では、遮光羽根1〜7の第1軸部1c〜7cは回転部材8の長穴8b〜8hの移動方向とは逆側の端面に当接する。
【0055】
次に、遮光羽根が初期位置から所定の絞り位置まで駆動した後、1−2相励磁駆動の2相通電時のような不安定位置でステッピングモータ11の通電をOFFした場合は、図5(b)或いは図5(c)に示すような状態になる。
【0056】
つまり、回転部材8はステッピングモータ11のコギングトルクにより1ステップ分進み方向、又は戻り方向に移動させられるが、その方向は特定されない。
【0057】
図5(b)に示すように、ステッピングモータ11の通電をOFFした時にステッピングモータ11のコギングトルクにより回転部材8が戻り方向に1ステップ分回転移動した時は、第1軸部1cは長穴8bの左端に当接する。従って、第1軸部1c自体は移動しない。これは、長穴8bに第1軸部1cが嵌合している状態で移動方向に隙間が1ステップ分設けてあるからである。
【0058】
ここで、前述したように、回転部材8の遮光羽根1〜7が接触する面の表面摩擦係数μDをカム部材9の遮光羽根1〜7が接触する面9iの表面摩擦係数をμEよりも小さく設定している。従って、回転部材8の駆動時に遮光羽根1〜7が回転部材8との摩擦により動かされる力よりも遮光羽根1〜7がカム部材9との摩擦によりカム部材9に張り付こうとする力の方が大きくなる。その結果、ステッピングモータ11の通電をOFFした時に、回転部材8がステッピングモータ11のコギングトルクにより1STEP分逆方向に戻されても、遮光羽根1〜7は動かされない。
【0059】
図5(c)に示すのように、ステッピングモータ11の通電をOFFした時にステッピングモータ11のコギングトルクにより回転部材8が進み方向に1ステップ分回転移動した時は、第1軸部1cは長穴8bの右端に当接する。それと同時に、第1軸部1cも進み方向に1ステップ分回転移動する。
【0060】
以上のように、遮光羽根が初期位置から所定の絞り位置まで駆動した後、1−2相励磁駆動の2相通電時にステッピングモータ11の通電をOFFした場合は、回転部材8はステッピングモータ11のコギングトルクにより1ステップ分移動させられる。この時、その移動方向は特定されないが、遮光羽根1〜7は進み方向に移動するときのみ移動し、戻り方向に移動する時は移動しないため、絞り口径を決める遮光羽根自体の移動方向は特定されることになる。
【0061】
従来、回転部材に設けられる遮光羽根の嵌合部は第1軸部と同径の円で構成していたため、通電OFF時には回転部材の移動とともに遮光羽根も移動し、その移動方向は特定できなかった。
【0062】
図8は従来の光量調節装置における回転部材に設けられた丸穴と遮光羽根に設けられた第1軸部との位置関係を表す図である。
【0063】
従来の光量調節装置は本発明の光量調節装置とは回転部材が異なるが、他の構成要素は本発明のものと同一となるので、同一符号を記して説明は省略する。
【0064】
図8(a)はステッピングモータ11の通電がON状態である時の丸穴18bと第1軸部1cとの位置関係を表している。
【0065】
図8(b)はステッピングモータ11の通電をOFFした時にステッピングモータ11のコギングトルクにより回転部材18が戻り方向に1ステップ分回転移動した時の丸穴18bと第1軸部1cとの位置関係を表している。
【0066】
図8(c)はステッピングモータ11の通電をOFFした時にステッピングモータ11のコギングトルクにより回転部材18が進み方向に1ステップ分回転移動した時の丸穴8bと第1軸部1cとの位置関係を表している。
【0067】
図8(a)の状態と比べて図8(b)の状態は、回転部材18が戻り方向に1ステップ分回転移動するとともに、第1軸部1cも戻り方向に1ステップ分回転移動している。
【0068】
また、図8(a)の状態と比べて図8(c)の状態は、回転部材18が進み方向に1ステップ分回転移動するとともに、第1軸部1cも進み方向に1ステップ分回転移動している。
【0069】
すなわち、遮光羽根が初期位置から所定の絞り位置まで駆動した後、1−2相励磁駆動の2相通電時にステッピングモータ11の通電をOFFした場合は、以下のような動きになる。つまり、回転部材18は遮光羽根1〜7とともにステッピングモータ11のコギングトルクにより1ステップ分移動させられ、その方向は特定されないのである。
【0070】
図6は、回転部材に設けられる遮光羽根の嵌合部が第1軸部と同径の円で構成されている場合の光量調節装置のモータ駆動における絞り口径精度を示している。
【0071】
図6(a)は従来の回転部材に設けられる遮光羽根の嵌合部が第1軸部と同径の円で構成している場合の光量調節装置のモータ駆動における絞り口径精度を表す図である。
【0072】
図6(b)は本実施形態の回転部材に設けられる遮光羽根の嵌合部が第1軸部と同径の円で構成している場合の光量調節装置のモータ駆動における絞り口径精度を表す図である。
なお、ここで言う口径精度とは本来のステップ数における開口径と実際の開口径との差分がどの程度のものかを示した数値である。
【0073】
図6(a)に示すように、回転部材に設けられる遮光羽根の嵌合部を第1軸部と同径の円で構成した場合、1−2相励磁駆動の1相通電時に相当する奇数のステップ位置では通電ON(点線)と通電OFF(実線)の口径精度の差はほとんどない。
【0074】
しかし、1−2相励磁駆動の2相通電時に相当する偶数のステップ位置では通電OFFした場合に口径精度のばらつきが発生しており、その方向性は+側(戻り方向)−側(進み方向)のどちらにも発生している。
【0075】
一方、図6(b)に示すように回転部材に設けられる遮光羽根の嵌合部を長穴形状で構成した場合は、図6(a)に示した従来例の構造と同じく、1−2相励磁駆動の1相通電時に相当する奇数ステップ位置で通電ONと通電OFFの口径精度の差はほとんどない。
【0076】
しかし、図6(b)に示した本発明の構成においては、1−2相励磁駆動の2相通電時に相当する偶数のステップ位置で通電OFFした場合の口径精度のばらつきは−側(進み方向)のみに発生している。
【0077】
したがって、トータルで見た場合の口径精度のばらつき幅は、従来例の光量調整装置に比べて、本発明の光量調節装置では約半分になっており、通電OFF時の口径精度が向上しているのがわかる。
【0078】
このように、本発明の光量調節装置では、1−2相励磁駆動の2相通電時、つまり不安定位置で通電をOFFした時の遮光羽根のばらつき方向を特定できるので、通電OFF時の絞り口径精度が向上するため、長時間露光時に通電を切ることができる。
【0079】
また、長時間露光時に通電を切ることができるので、電力消費を減らすことが可能になる。
【0080】
なお、本実施形態では回転部材8の長穴部8b〜8hの2つのR部中心8o、8pと回転部材8の回転中心である8lとのなす角θを
θ=360/4N*Z1/Z2
と設定したが、θ>360/4N*Z1/Z2と設定しても、本発明の効果は同様のものとなる。
【0081】
<第2の実施形態>
図7は第2の実施形態における回転部材に設けられた長穴部の1つの拡大図である。
【0082】
本実施形態における光量調節装置は第1の実施形態とは回転部材の長穴部形状のみが異なり、その他の構成要素は同一であるので、説明は省略する。
【0083】
図7における、長穴部28bは、28oからR1の距離にある端部28mと、28pからR1の距離にある端部28nと、回転部材8の回転中心28lを中心としたR部28qと28rとからなる長穴形状に形成される。
【0084】
8oと8pは回転部材28の回転中心である28lから等距離の位置にある。
【0085】
R部28qとR部28rとの距離D1は遮光羽根1の第1軸部1cの直径とほぼ等しい値に設定され(部品公差分D1のほうが大きい)、R1は遮光羽根1の第1軸部1cの半径とほぼ等しい値に設定される。
【0086】
28lから28oを結んだ線と端部28mは平行状態にあり、28lから28pを結んだ線と端部28nは平行状態にある。また、28o、28pと回転部材28の回転中心である28lとのなす角θは以下の式で設定される。
【0087】
θ=360/4N*Z1/Z2
N:ステッピングモータ11のマグネット着磁極数
Z1:ピニオンギア12の歯数
Z2:回転部材28のギア部28jの歯数
ここで、θはステッピングモータ11の1−2相励磁駆動における1ステップ駆動時の回転部材28の回転角に相当する。
【0088】
不図示の他の長穴部28c〜28hも同様の形状となる。
【0089】
回転部材28の長穴部を上記のような形状にすることで、本実施形態においても、第1の実施形態と同様の効果が得られる。
【0090】
つまり、遮光羽根が初期位置から所定の絞り位置まで駆動した後、1−2相励磁駆動の2相通電時にステッピングモータ11の通電をOFFした場合は、回転部材28はステッピングモータ11のコギングトルクにより1ステップ分移動させられる。この時、その移動方向は特定されないが、遮光羽根1〜7は進み方向に移動するときのみ移動し、戻り方向に移動する時は移動しないため、絞り口径を決める遮光羽根自体の移動方向は特定されることになる。
【0091】
なお、本実施形態では回転部材28の長穴部28b〜28hに設定される角θを
θ=360/4N*Z1/Z2
と設定したが、θ>360/4N*Z1/Z2と設定しても、本発明の効果は同様のものとなる。
【図面の簡単な説明】
【0092】
【図1】第1の実施形態に係る光量調節装置の分解斜視図である。
【図2】第1の実施形態の光量調節装置における遮光羽根と回転部材とカム部材との位置関係を表す図である。
【図3】第1の実施形態の光量調節装置における回転部材に設けられた長穴の拡大図である。
【図4】第1の実施形態のステッピングモータのコギングトルクを表す図である。
【図5】第1の実施形態の回転部材に設けられた長穴と遮光羽根に設けられた第1軸部との位置関係を示した図である。
【図6】回転部材に設けられる遮光羽根の嵌合部が第1軸部と同径の円で構成されている場合の光量調節装置のモータ駆動における絞り口径精度を示した図である。
【図7】第2の実施形態における回転部材に設けられた長穴部の1つの拡大図である。
【図8】従来の光量調節装置における回転部材に設けられた丸穴と遮光羽根に設けられた第1軸部との位置関係を表す図である。
【符号の説明】
【0093】
1〜7 遮光羽根
1a〜7a 第1基部
1b〜7b 第2基部
1c〜6c 第1軸部
1d〜6d 第2軸部
8 回転部材
8b〜8h 長穴部
28b 長穴部
8i ギア部
9 カム部材
9b〜9h カム溝部
10 押え部材
11 ステッピングモータ
12 ピニオンギア
13 初期位置センサー
【特許請求の範囲】
【請求項1】
複数枚の遮光羽根と、
前記遮光羽根の動きを規制するカムを有するカム部材と、
回転動作をすることで前記遮光羽根を所定の絞り径となる絞り位置まで駆動する回転手段と、
前記回転手段を駆動するステッピングモータとを備えた光量調節装置において、
前記回転手段は前記遮光羽根に設けられた軸が嵌合する穴部を有し、
前記穴部の前記遮光羽根の駆動方向への長さが、前記軸の直径と前記穴部における前記ステッピングモータによる1ステップの移動量を足した長さよりも長いことを特徴とする光量調節装置。
【請求項2】
前記回転手段の前記遮光羽根が接触する面の表面摩擦係数は前記カム部材の前記遮光羽根が接触する面の表面摩擦係数よりも小さいことを特徴とする請求項1に記載の光量調節装置。
【請求項3】
前記遮光羽根の絞り位置に応じて前記ステッピングモータの駆動を制御する制御手段を備え、前記制御手段は、該遮光羽根を初期位置から所定の絞り位置に駆動させる時の該ステッピングモータの駆動ステップ数よりも、該遮光羽根を該所定の絞り位置から該初期位置に戻す時の駆動ステップ数を多くすることを特徴とする請求項1乃至2に記載の光量調節装置。
【請求項1】
複数枚の遮光羽根と、
前記遮光羽根の動きを規制するカムを有するカム部材と、
回転動作をすることで前記遮光羽根を所定の絞り径となる絞り位置まで駆動する回転手段と、
前記回転手段を駆動するステッピングモータとを備えた光量調節装置において、
前記回転手段は前記遮光羽根に設けられた軸が嵌合する穴部を有し、
前記穴部の前記遮光羽根の駆動方向への長さが、前記軸の直径と前記穴部における前記ステッピングモータによる1ステップの移動量を足した長さよりも長いことを特徴とする光量調節装置。
【請求項2】
前記回転手段の前記遮光羽根が接触する面の表面摩擦係数は前記カム部材の前記遮光羽根が接触する面の表面摩擦係数よりも小さいことを特徴とする請求項1に記載の光量調節装置。
【請求項3】
前記遮光羽根の絞り位置に応じて前記ステッピングモータの駆動を制御する制御手段を備え、前記制御手段は、該遮光羽根を初期位置から所定の絞り位置に駆動させる時の該ステッピングモータの駆動ステップ数よりも、該遮光羽根を該所定の絞り位置から該初期位置に戻す時の駆動ステップ数を多くすることを特徴とする請求項1乃至2に記載の光量調節装置。
【図1】



【図2】
【図3】
【図4】
【図5】
【図6】

【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2009−14921(P2009−14921A)
【公開日】平成21年1月22日(2009.1.22)
【国際特許分類】
【出願番号】特願2007−175295(P2007−175295)
【出願日】平成19年7月3日(2007.7.3)
【出願人】(000001007)キヤノン株式会社 (59,756)
【Fターム(参考)】
【公開日】平成21年1月22日(2009.1.22)
【国際特許分類】
【出願日】平成19年7月3日(2007.7.3)
【出願人】(000001007)キヤノン株式会社 (59,756)
【Fターム(参考)】
[ Back to top ]