
荷物用エレベータシステム
【課題】エレベータドア全開時以外において荷物運搬車のエレベータドアへの衝突を確実に防止した荷物用エレベータシステムを提供する。
【解決手段】荷物運搬車5によりエレベータのかご3への荷物の搬入搬出を行うか又は荷物運搬車自体をかご内に搬入搬出して荷物運搬車ごと荷物の搬送を行う荷物用エレベータシステムであって、エレベータの乗場側及びかご側の少なくとも一方に設けられ、エレベータドア2,4が全開状態にある時以外、エレベータドア近傍のエレベータドアから所定距離範囲内の送信領域に所定の距離検出用信号を送信する距離検出用信号送信手段7a,7b、上記荷物運搬車に設けられ上記送信領域で所定の距離検出用信号を受ける距離検出用信号受信手段8、上記荷物運搬車に設けられ上記距離検出用信号受信手段で所定の距離検出用信号を受信すると荷物運搬車の駆動装置13に駆動停止信号を出力する荷物運搬車補助制御手段11を含む。
【解決手段】荷物運搬車5によりエレベータのかご3への荷物の搬入搬出を行うか又は荷物運搬車自体をかご内に搬入搬出して荷物運搬車ごと荷物の搬送を行う荷物用エレベータシステムであって、エレベータの乗場側及びかご側の少なくとも一方に設けられ、エレベータドア2,4が全開状態にある時以外、エレベータドア近傍のエレベータドアから所定距離範囲内の送信領域に所定の距離検出用信号を送信する距離検出用信号送信手段7a,7b、上記荷物運搬車に設けられ上記送信領域で所定の距離検出用信号を受ける距離検出用信号受信手段8、上記荷物運搬車に設けられ上記距離検出用信号受信手段で所定の距離検出用信号を受信すると荷物運搬車の駆動装置13に駆動停止信号を出力する荷物運搬車補助制御手段11を含む。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は荷物用エレベータシステムに関し、特に荷物運搬車の荷物搬送時のエレベータドアへの衝突を防止したものに関する。
【背景技術】
【0002】
従来、この種の装置として、運搬車が乗場戸に接近した距離に応じた信号を出力する接近距離検出装置と、運搬車に設置された警報器と、運搬車に設置された接近距離検出装置の出力信号の受信装置と、乗場戸が開閉中に運搬車が接近して、接近距離検出装置の出力信号に応じて運搬車に設置された警報器の鳴動音を増減させる鳴動音調整装置とを備え、警報器を適正な大きさで鳴動させるとともに、鳴動音が他の運転者に影響を及ぼすことを防止するものがあった(例えば特許文献1参照)。
【0003】
【特許文献1】特開平6−255962号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
上記のような従来技術では、車両の乗場ドアへの接近を警報器を鳴動させることで知らせているが、車両の運転者が警報を聞き逃したり、聞き取れなかったりすることで、車両の乗場ドアへの衝突を防止できない場合があるという課題があった。
【0005】
この発明は上記の課題を解消するためになされたものであり、エレベータドアの全開時以外において、荷物運搬車のエレベータドアへの衝突を確実に防止するようにした荷物用エレベータシステムを提供することを目的とする。
【課題を解決するための手段】
【0006】
この発明は、荷物運搬車によりエレベータのかごへの荷物の搬入搬出を行うか又は荷物運搬車自体をかご内に搬入搬出して荷物運搬車ごと荷物の搬送を行う荷物用エレベータシステムであって、エレベータの乗場側及びかご側の少なくとも一方に設けられ、エレベータドアが全開状態にある時以外、エレベータドア近傍のエレベータドアから所定距離範囲内の送信領域に所定の距離検出用信号を送信する距離検出用信号送信手段と、上記荷物運搬車に設けられ、上記送信領域で所定の距離検出用信号を受ける距離検出用信号受信手段と、上記荷物運搬車に設けられ、上記距離検出用信号受信手段で所定の距離検出用信号を受信すると荷物運搬車の駆動装置に駆動停止信号を出力する荷物運搬車補助制御手段と、を備えたことを特徴とする荷物用エレベータシステムにある。
【発明の効果】
【0007】
この発明では、エレベータドアの全開時以外において、荷物運搬車のエレベータドアへの衝突を確実に防止できる。
【発明を実施するための最良の形態】
【0008】
実施の形態1.
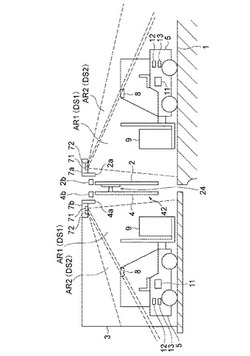
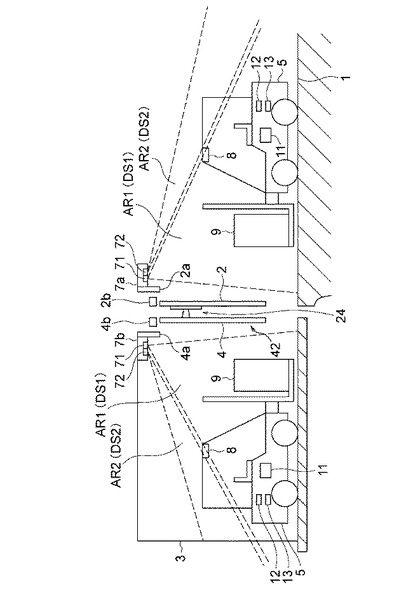
図1はこの発明の一実施の形態による荷物用エレベータシステムの全体構成を示す側面図である。この荷物用エレベータシステムは、荷物運搬車である例えばフォークリフト5によりエレベータのかご3への荷物9の搬入搬出を行うか、又はフォークリフト5自体をかご3内に搬入搬出してフォークリフト5ごと荷物9の搬送を行うものである。
【0009】
各階床の乗場1において、乗場ドア2の三方枠上部2aには距離検出用信号送信装置7aが設けられている。またかご3のかごドア4の上部にあるかご内幕板部4aにも距離検出用信号送信装置7bが設けられている。距離検出用信号送信装置7a、7bは乗場1及びかご3内においてそれぞれ、乗場ドア2又はかごドア4からの距離に従って、乗場ドア2又はかごドア4に近い方から第1の送信領域AR1と第2の送信領域AR2に第1の距離検出用信号DS1と第2の距離検出用信号DS2をそれぞれ送信する送信部71,72を有する。
【0010】
但し、これらの第1の距離検出用信号DS1と第2の距離検出用信号DS2は、フォークリフト5が移動して荷物9をかご3への搬入搬出している間、あるいはフォークリフト5をかご3に搬入搬出している間の、乗場ドア2及びかごドア4からなるエレベータドア42が全開状態にある時は送信されない。このためにドア位置検出手段であるドア位置検出器2b、4bは、乗場ドア2及びかごドア4の開閉位置(開閉状態)を検出し、全開状態であることを検出した時に全開信号FOSを出力する。なお、乗場ドア2とかごドア4は、各階床にかご3が着床する度にこれらの間で互いに系合して形成される周知の系合機構24により、かごドア4がかご側の駆動装置(図示省略)により開閉すると乗場ドア2が連動して開閉する。
【0011】
そしてフォークリフト5には、第1の距離検出用信号DS1と第2の距離検出用信号DS2を受信するための距離検出用信号受信装置8が天井部に設けられると共に、さらに各信号を受信した時にアラーム装置12又はエンジンやモータからなるフォークリフト5の駆動装置13にそれぞれ所定の信号を出力して制御を行う荷物運搬車補助制御装置11が設けられている。
【0012】
図2には、距離検出用信号送信装置7a、7bの構成の一例を示す。制御部73は例えばマイクロコンピュータで構成され、ドア位置検出器2b、4bから全開信号FOSが入力されている時以外は、送信部71、72に第1の距離検出用信号DS1、第2の距離検出用信号DS2をそれぞれ送信させる。
【0013】
図3には、フォークリフト5の距離検出用信号受信装置8及び荷物運搬車補助制御装置11の構成の一例を示す。距離検出用信号受信装置8は、送信部71、72からの信号DS1,DS2を受信する受信部81を含む。荷物運搬車補助制御装置11は、受信部81で受信された信号に従って、アラーム装置12にアラーム発生信号AS又は駆動装置13に駆動停止信号DSSを出力する、例えばマイクロコンピュータで構成される制御部111を含む。
【0014】
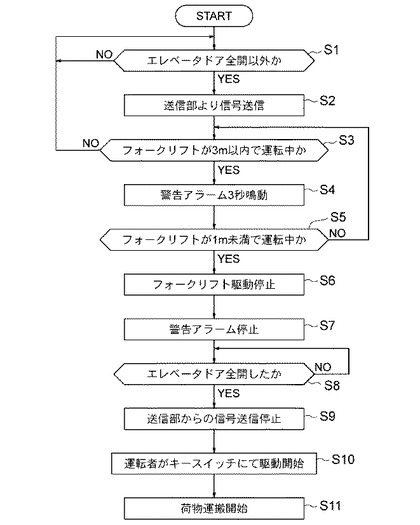
図4はこの発明の一実施の形態による荷物用エレベータシステムの動作を説明するためのフローチャートであり、以下、図に従って動作を説明する。通常、フォークリフト5によりエレベータのかご3への荷物9の搬入搬出を行う間、又はフォークリフト5自体をかご3内に搬入搬出(乗り降り)する間、乗場ドア2及びかごドア4は全開位置(全開状態)にある。この発明では、乗場ドア2及びかごドア4が全開状態にある時以外の状態での、フォークリフト5の運転による乗場ドア2及びかごドア4への衝突を防止する。
【0015】
距離検出用信号送信装置7a、7bの制御部73では、乗場ドア2及びかごドア4のドア位置検出器2b、4bから全開信号FOSが入力されている時以外は(ステップS1)、送信部71から第1の送信領域AR1に第1の距離検出用信号DS1、送信部72から第2の送信領域AR2に第2の距離検出用信号DS2をそれぞれ送信させる(ステップS2)。例えば第1の送信領域AR1は、距離検出用信号受信装置8で第1の距離検出用信号DS1が受信された時に、フォークリフト5が乗場ドア2又はかごドア4から第1の距離範囲(例えば0〜1未満m)にあるように設定される。また第2の送信領域AR2は、距離検出用信号受信装置8で第2の距離検出用信号DS2が受信された時に、フォークリフト5が乗場ドア2又はかごドア4から第2の距離範囲(例えば1〜3m)にあるように設定される。
【0016】
距離検出用信号受信装置8の受信部81で距離検出用信号DS1又はDS2が受信されると、荷物運搬車補助制御装置11の制御部111に送られる。そして制御部111では、例えば予め記憶されている信号の特性等と比較して、第2の距離検出用信号DS2が受信されたと判定されると、フォークリフト5が乗場ドア2又はかごドア4から3m以内で運転中であることを判断し(ステップS3)、アラーム装置12にアラーム発生信号ASを出力し、例えば3秒間、警告アラームを鳴動させる(ステップS4)。
【0017】
また、制御部111で第1の距離検出用信号DS1が受信されたと判定されると、フォークリフト5が乗場ドア2又はかごドア4から1m未満で運転中であることを判断し(ステップS5)、駆動装置13に駆動停止信号DSSを出力し、フォークリフト5を駆動停止させる(ステップS6)。これにより、この状態でフォークリフト5のキースイッチ(図示省略)を操作してもフォークリフト5は駆動できない。また、この時、アラーム装置12へアラーム発生信号ASが出力中であれば停止させて、警告アラームを停止させる(ステップS7)。
【0018】
そしてこの状態で、乗場ドア2及びかごドア4(エレベータドア)が全開状態になると(ステップS8)、ドア位置検出器2b、4bがこれを検出して全開信号FOSが入力され、距離検出用信号送信装置7a、7bが第1の距離検出用信号DS1及び第2の距離検出用信号DS2の送信を停止する(ステップS9)。これにより距離検出用信号受信装置8の受信部81で距離検出用信号DS1及びDS2が受信されないため、荷物運搬車補助制御装置11の制御部111は駆動停止信号DSS及びアラーム発生信号ASの出力を停止する。
【0019】
この状態で、フォークリフト5の運転者がキースイッチを操作すれば、フォークリフト5の駆動装置13が動作して、駆動開始が可能となり(ステップS10)、荷物の運搬を開始することができる(ステップS11)。
【0020】
フォークリフト5自体がかご3に乗った場合、通常、運転者はキースイッチをOFFし駆動装置13を停止させ、エレベータを操作し、かご3が目的階に停止後、駆動装置13を始動し、フォークリフト5を運転してかご3から降りる。この発明においては、かご3内に乗り込んだフォークリフト5の駆動装置13をOFFせずに運転者がエレベータを操作した場合、乗場ドア2及びかごドア4(エレベータドア)が全開位置から動いた時点で距離検出用信号送信装置7bの送信部71及び送信部72から信号が送信され(ステップS2に相当)、かごドア4からの距離に従って、アラームの発生又はフォークリフト5の駆動停止が行われる(ステップS4、S6に相当)。
【0021】
かご3内におけるフォークリフト5の停車位置を、距離検出用信号受信装置8が第1の送信領域AR1内にある位置に設定すれば、かご3内に乗り込んだフォークリフト5の駆動装置13をOFFせずに運転者がエレベータを操作した場合、確実にフォークリフト5の駆動停止が行われる。
【0022】
以降、かご3が目的階に到着しエレベータドアが全開すれば(ステップS9に相当)、フォークリフト5の駆動が可能となる。
【0023】
なお上記説明では、距離検出用信号送信装置を、各乗場側及びかご側のそれぞれに設けたが、乗場側及びかご側いずれか一方の側だけに設けたシステムとしてもよい。また、第1の送信領域AR1及び第2の送信領域AR2のエレベータドアからの距離の設定も、乗場やかごや荷物搬送車のそれぞれの大きさを考慮して適宜決めればよい。
【0024】
また、第2の送信領域AR2を設けて、荷物搬送車の駆動停止の予告段階としてアラームを発生させることは、必ずしも行う必要はなく、必要に応じて設定すればよい。特にかご側では、上述のように第1の送信領域AR1だけを設けて、フォークリフト5の停車位置を、距離検出用信号受信装置が第1の送信領域AR1内にある位置に設定すれば、かご内に乗り込んだフォークリフトの駆動装置をOFFせずに運転者がエレベータを操作した場合、確実にフォークリフトの駆動停止を行わせることができる。またエレベータドアが閉じている状態にある、かごの昇降中にかご内では荷物の搬送を行うことは基本的にないので、第2の送信領域AR2を設定しなくてもよい。
【0025】
また、エレベータドアであるかごドアと各階床の乗場ドアが、各階床でのドア開閉時に係合機構により連動して開閉動作する場合、ドア位置検出手段はかごドアだけに設けるようにしてもよく、この場合には、かごドアのドア位置検出手段の全開信号をエレベータ制御盤(図示省略)に送り、各階床の乗場側の距離検出用信号送信装置では、エレベータ制御盤から全開信号FOSを得るようにする。
【図面の簡単な説明】
【0026】
【図1】この発明の一実施の形態による荷物用エレベータシステムの全体構成を示す側面図である。
【図2】図1の距離検出用信号送信装置の構成の一例を示す図である。
【図3】図1のフォークリフトの距離検出用信号受信装置及び荷物運搬車補助制御装置の構成の一例を示す図である。
【図4】この発明の一実施の形態による荷物用エレベータシステムの動作を説明するためのフローチャートである。
【符号の説明】
【0027】
1 乗場、2 乗場ドア、2a 三方枠上部、2b,4b ドア位置検出器(ドア位置検出手段)、3 かご、4 かごドア、4a かご内幕板部、5 フォークリフト、7a,7b 距離検出用信号送信装置(距離検出用信号送信手段)、8 距離検出用信号受信装置(距離検出用信号受信手段)、9 荷物、11 荷物運搬車補助制御装置(荷物運搬車補助制御手段)、12 アラーム装置、13 駆動装置、24 系合機構、42 エレベータドア、71,72 送信部、73 制御部、81 受信部、111 制御部、AR1 第1の送信領域、AR2 第2の送信領域、AS アラーム発生信号、DS1 第1の距離検出用信号、DS2 第2の距離検出用信号、DSS 駆動停止信号、FOS 全開信号。
【技術分野】
【0001】
この発明は荷物用エレベータシステムに関し、特に荷物運搬車の荷物搬送時のエレベータドアへの衝突を防止したものに関する。
【背景技術】
【0002】
従来、この種の装置として、運搬車が乗場戸に接近した距離に応じた信号を出力する接近距離検出装置と、運搬車に設置された警報器と、運搬車に設置された接近距離検出装置の出力信号の受信装置と、乗場戸が開閉中に運搬車が接近して、接近距離検出装置の出力信号に応じて運搬車に設置された警報器の鳴動音を増減させる鳴動音調整装置とを備え、警報器を適正な大きさで鳴動させるとともに、鳴動音が他の運転者に影響を及ぼすことを防止するものがあった(例えば特許文献1参照)。
【0003】
【特許文献1】特開平6−255962号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
上記のような従来技術では、車両の乗場ドアへの接近を警報器を鳴動させることで知らせているが、車両の運転者が警報を聞き逃したり、聞き取れなかったりすることで、車両の乗場ドアへの衝突を防止できない場合があるという課題があった。
【0005】
この発明は上記の課題を解消するためになされたものであり、エレベータドアの全開時以外において、荷物運搬車のエレベータドアへの衝突を確実に防止するようにした荷物用エレベータシステムを提供することを目的とする。
【課題を解決するための手段】
【0006】
この発明は、荷物運搬車によりエレベータのかごへの荷物の搬入搬出を行うか又は荷物運搬車自体をかご内に搬入搬出して荷物運搬車ごと荷物の搬送を行う荷物用エレベータシステムであって、エレベータの乗場側及びかご側の少なくとも一方に設けられ、エレベータドアが全開状態にある時以外、エレベータドア近傍のエレベータドアから所定距離範囲内の送信領域に所定の距離検出用信号を送信する距離検出用信号送信手段と、上記荷物運搬車に設けられ、上記送信領域で所定の距離検出用信号を受ける距離検出用信号受信手段と、上記荷物運搬車に設けられ、上記距離検出用信号受信手段で所定の距離検出用信号を受信すると荷物運搬車の駆動装置に駆動停止信号を出力する荷物運搬車補助制御手段と、を備えたことを特徴とする荷物用エレベータシステムにある。
【発明の効果】
【0007】
この発明では、エレベータドアの全開時以外において、荷物運搬車のエレベータドアへの衝突を確実に防止できる。
【発明を実施するための最良の形態】
【0008】
実施の形態1.
図1はこの発明の一実施の形態による荷物用エレベータシステムの全体構成を示す側面図である。この荷物用エレベータシステムは、荷物運搬車である例えばフォークリフト5によりエレベータのかご3への荷物9の搬入搬出を行うか、又はフォークリフト5自体をかご3内に搬入搬出してフォークリフト5ごと荷物9の搬送を行うものである。
【0009】
各階床の乗場1において、乗場ドア2の三方枠上部2aには距離検出用信号送信装置7aが設けられている。またかご3のかごドア4の上部にあるかご内幕板部4aにも距離検出用信号送信装置7bが設けられている。距離検出用信号送信装置7a、7bは乗場1及びかご3内においてそれぞれ、乗場ドア2又はかごドア4からの距離に従って、乗場ドア2又はかごドア4に近い方から第1の送信領域AR1と第2の送信領域AR2に第1の距離検出用信号DS1と第2の距離検出用信号DS2をそれぞれ送信する送信部71,72を有する。
【0010】
但し、これらの第1の距離検出用信号DS1と第2の距離検出用信号DS2は、フォークリフト5が移動して荷物9をかご3への搬入搬出している間、あるいはフォークリフト5をかご3に搬入搬出している間の、乗場ドア2及びかごドア4からなるエレベータドア42が全開状態にある時は送信されない。このためにドア位置検出手段であるドア位置検出器2b、4bは、乗場ドア2及びかごドア4の開閉位置(開閉状態)を検出し、全開状態であることを検出した時に全開信号FOSを出力する。なお、乗場ドア2とかごドア4は、各階床にかご3が着床する度にこれらの間で互いに系合して形成される周知の系合機構24により、かごドア4がかご側の駆動装置(図示省略)により開閉すると乗場ドア2が連動して開閉する。
【0011】
そしてフォークリフト5には、第1の距離検出用信号DS1と第2の距離検出用信号DS2を受信するための距離検出用信号受信装置8が天井部に設けられると共に、さらに各信号を受信した時にアラーム装置12又はエンジンやモータからなるフォークリフト5の駆動装置13にそれぞれ所定の信号を出力して制御を行う荷物運搬車補助制御装置11が設けられている。
【0012】
図2には、距離検出用信号送信装置7a、7bの構成の一例を示す。制御部73は例えばマイクロコンピュータで構成され、ドア位置検出器2b、4bから全開信号FOSが入力されている時以外は、送信部71、72に第1の距離検出用信号DS1、第2の距離検出用信号DS2をそれぞれ送信させる。
【0013】
図3には、フォークリフト5の距離検出用信号受信装置8及び荷物運搬車補助制御装置11の構成の一例を示す。距離検出用信号受信装置8は、送信部71、72からの信号DS1,DS2を受信する受信部81を含む。荷物運搬車補助制御装置11は、受信部81で受信された信号に従って、アラーム装置12にアラーム発生信号AS又は駆動装置13に駆動停止信号DSSを出力する、例えばマイクロコンピュータで構成される制御部111を含む。
【0014】
図4はこの発明の一実施の形態による荷物用エレベータシステムの動作を説明するためのフローチャートであり、以下、図に従って動作を説明する。通常、フォークリフト5によりエレベータのかご3への荷物9の搬入搬出を行う間、又はフォークリフト5自体をかご3内に搬入搬出(乗り降り)する間、乗場ドア2及びかごドア4は全開位置(全開状態)にある。この発明では、乗場ドア2及びかごドア4が全開状態にある時以外の状態での、フォークリフト5の運転による乗場ドア2及びかごドア4への衝突を防止する。
【0015】
距離検出用信号送信装置7a、7bの制御部73では、乗場ドア2及びかごドア4のドア位置検出器2b、4bから全開信号FOSが入力されている時以外は(ステップS1)、送信部71から第1の送信領域AR1に第1の距離検出用信号DS1、送信部72から第2の送信領域AR2に第2の距離検出用信号DS2をそれぞれ送信させる(ステップS2)。例えば第1の送信領域AR1は、距離検出用信号受信装置8で第1の距離検出用信号DS1が受信された時に、フォークリフト5が乗場ドア2又はかごドア4から第1の距離範囲(例えば0〜1未満m)にあるように設定される。また第2の送信領域AR2は、距離検出用信号受信装置8で第2の距離検出用信号DS2が受信された時に、フォークリフト5が乗場ドア2又はかごドア4から第2の距離範囲(例えば1〜3m)にあるように設定される。
【0016】
距離検出用信号受信装置8の受信部81で距離検出用信号DS1又はDS2が受信されると、荷物運搬車補助制御装置11の制御部111に送られる。そして制御部111では、例えば予め記憶されている信号の特性等と比較して、第2の距離検出用信号DS2が受信されたと判定されると、フォークリフト5が乗場ドア2又はかごドア4から3m以内で運転中であることを判断し(ステップS3)、アラーム装置12にアラーム発生信号ASを出力し、例えば3秒間、警告アラームを鳴動させる(ステップS4)。
【0017】
また、制御部111で第1の距離検出用信号DS1が受信されたと判定されると、フォークリフト5が乗場ドア2又はかごドア4から1m未満で運転中であることを判断し(ステップS5)、駆動装置13に駆動停止信号DSSを出力し、フォークリフト5を駆動停止させる(ステップS6)。これにより、この状態でフォークリフト5のキースイッチ(図示省略)を操作してもフォークリフト5は駆動できない。また、この時、アラーム装置12へアラーム発生信号ASが出力中であれば停止させて、警告アラームを停止させる(ステップS7)。
【0018】
そしてこの状態で、乗場ドア2及びかごドア4(エレベータドア)が全開状態になると(ステップS8)、ドア位置検出器2b、4bがこれを検出して全開信号FOSが入力され、距離検出用信号送信装置7a、7bが第1の距離検出用信号DS1及び第2の距離検出用信号DS2の送信を停止する(ステップS9)。これにより距離検出用信号受信装置8の受信部81で距離検出用信号DS1及びDS2が受信されないため、荷物運搬車補助制御装置11の制御部111は駆動停止信号DSS及びアラーム発生信号ASの出力を停止する。
【0019】
この状態で、フォークリフト5の運転者がキースイッチを操作すれば、フォークリフト5の駆動装置13が動作して、駆動開始が可能となり(ステップS10)、荷物の運搬を開始することができる(ステップS11)。
【0020】
フォークリフト5自体がかご3に乗った場合、通常、運転者はキースイッチをOFFし駆動装置13を停止させ、エレベータを操作し、かご3が目的階に停止後、駆動装置13を始動し、フォークリフト5を運転してかご3から降りる。この発明においては、かご3内に乗り込んだフォークリフト5の駆動装置13をOFFせずに運転者がエレベータを操作した場合、乗場ドア2及びかごドア4(エレベータドア)が全開位置から動いた時点で距離検出用信号送信装置7bの送信部71及び送信部72から信号が送信され(ステップS2に相当)、かごドア4からの距離に従って、アラームの発生又はフォークリフト5の駆動停止が行われる(ステップS4、S6に相当)。
【0021】
かご3内におけるフォークリフト5の停車位置を、距離検出用信号受信装置8が第1の送信領域AR1内にある位置に設定すれば、かご3内に乗り込んだフォークリフト5の駆動装置13をOFFせずに運転者がエレベータを操作した場合、確実にフォークリフト5の駆動停止が行われる。
【0022】
以降、かご3が目的階に到着しエレベータドアが全開すれば(ステップS9に相当)、フォークリフト5の駆動が可能となる。
【0023】
なお上記説明では、距離検出用信号送信装置を、各乗場側及びかご側のそれぞれに設けたが、乗場側及びかご側いずれか一方の側だけに設けたシステムとしてもよい。また、第1の送信領域AR1及び第2の送信領域AR2のエレベータドアからの距離の設定も、乗場やかごや荷物搬送車のそれぞれの大きさを考慮して適宜決めればよい。
【0024】
また、第2の送信領域AR2を設けて、荷物搬送車の駆動停止の予告段階としてアラームを発生させることは、必ずしも行う必要はなく、必要に応じて設定すればよい。特にかご側では、上述のように第1の送信領域AR1だけを設けて、フォークリフト5の停車位置を、距離検出用信号受信装置が第1の送信領域AR1内にある位置に設定すれば、かご内に乗り込んだフォークリフトの駆動装置をOFFせずに運転者がエレベータを操作した場合、確実にフォークリフトの駆動停止を行わせることができる。またエレベータドアが閉じている状態にある、かごの昇降中にかご内では荷物の搬送を行うことは基本的にないので、第2の送信領域AR2を設定しなくてもよい。
【0025】
また、エレベータドアであるかごドアと各階床の乗場ドアが、各階床でのドア開閉時に係合機構により連動して開閉動作する場合、ドア位置検出手段はかごドアだけに設けるようにしてもよく、この場合には、かごドアのドア位置検出手段の全開信号をエレベータ制御盤(図示省略)に送り、各階床の乗場側の距離検出用信号送信装置では、エレベータ制御盤から全開信号FOSを得るようにする。
【図面の簡単な説明】
【0026】
【図1】この発明の一実施の形態による荷物用エレベータシステムの全体構成を示す側面図である。
【図2】図1の距離検出用信号送信装置の構成の一例を示す図である。
【図3】図1のフォークリフトの距離検出用信号受信装置及び荷物運搬車補助制御装置の構成の一例を示す図である。
【図4】この発明の一実施の形態による荷物用エレベータシステムの動作を説明するためのフローチャートである。
【符号の説明】
【0027】
1 乗場、2 乗場ドア、2a 三方枠上部、2b,4b ドア位置検出器(ドア位置検出手段)、3 かご、4 かごドア、4a かご内幕板部、5 フォークリフト、7a,7b 距離検出用信号送信装置(距離検出用信号送信手段)、8 距離検出用信号受信装置(距離検出用信号受信手段)、9 荷物、11 荷物運搬車補助制御装置(荷物運搬車補助制御手段)、12 アラーム装置、13 駆動装置、24 系合機構、42 エレベータドア、71,72 送信部、73 制御部、81 受信部、111 制御部、AR1 第1の送信領域、AR2 第2の送信領域、AS アラーム発生信号、DS1 第1の距離検出用信号、DS2 第2の距離検出用信号、DSS 駆動停止信号、FOS 全開信号。
【特許請求の範囲】
【請求項1】
荷物運搬車によりエレベータのかごへの荷物の搬入搬出を行うか又は荷物運搬車自体をかご内に搬入搬出して荷物運搬車ごと荷物の搬送を行う荷物用エレベータシステムであって、
エレベータの乗場側及びかご側の少なくとも一方に設けられ、エレベータドアが全開状態にある時以外、エレベータドア近傍のエレベータドアから所定距離範囲内の送信領域に所定の距離検出用信号を送信する距離検出用信号送信手段と、
上記荷物運搬車に設けられ、上記送信領域で所定の距離検出用信号を受ける距離検出用信号受信手段と、
上記荷物運搬車に設けられ、上記距離検出用信号受信手段で所定の距離検出用信号を受信すると荷物運搬車の駆動装置に駆動停止信号を出力する荷物運搬車補助制御手段と、
を備えたことを特徴とする荷物用エレベータシステム。
【請求項2】
少なくとも乗場側の上記距離検出用信号送信手段が、エレベータドアからの距離に従ってエレベータドアに近い方から第1の送信領域と第2の送信領域に第1の距離検出用信号と第2の距離検出用信号をそれぞれ送信し、
上記荷物運搬車補助制御手段が、上記距離検出用信号受信手段で第2の距離検出用信号を受信すると荷物運搬車のアラーム装置にアラーム発生信号を出力し、第1の距離検出用信号を受信すると上記荷物運搬車の駆動装置に駆動停止信号を出力する、
ことを特徴とする請求項1に記載の荷物用エレベータシステム。
【請求項3】
上記エレベータドアのドア位置から全開状態を検出して全開信号を出力するドア位置検出手段をさらに備え、上記距離検出用信号送信手段が、上記ドア位置検出手段からの全開信号がない時に距離検出用信号を送信することを特徴とする請求項1又は2に記載の荷物用エレベータシステム。
【請求項4】
上記エレベータドアがかごドアと、各階の乗場ドアを含むことを特徴とする請求項1から3までのいずれか1項に記載の荷物用エレベータシステム。
【請求項5】
上記エレベータドアがかごドアと、各階床で上記かごドアと係合機構により連動して開閉動作する各階の乗場ドアを含み、上記ドア位置検出手段が上記かごドアに設けられており、各階床の乗場側では上記距離検出用信号送信手段が上記かごドアに設けられ上記ドア位置検出手段からの全開信号をエレベータ制御盤を介して得ることを特徴とする請求項3に記載の荷物用エレベータシステム。
【請求項1】
荷物運搬車によりエレベータのかごへの荷物の搬入搬出を行うか又は荷物運搬車自体をかご内に搬入搬出して荷物運搬車ごと荷物の搬送を行う荷物用エレベータシステムであって、
エレベータの乗場側及びかご側の少なくとも一方に設けられ、エレベータドアが全開状態にある時以外、エレベータドア近傍のエレベータドアから所定距離範囲内の送信領域に所定の距離検出用信号を送信する距離検出用信号送信手段と、
上記荷物運搬車に設けられ、上記送信領域で所定の距離検出用信号を受ける距離検出用信号受信手段と、
上記荷物運搬車に設けられ、上記距離検出用信号受信手段で所定の距離検出用信号を受信すると荷物運搬車の駆動装置に駆動停止信号を出力する荷物運搬車補助制御手段と、
を備えたことを特徴とする荷物用エレベータシステム。
【請求項2】
少なくとも乗場側の上記距離検出用信号送信手段が、エレベータドアからの距離に従ってエレベータドアに近い方から第1の送信領域と第2の送信領域に第1の距離検出用信号と第2の距離検出用信号をそれぞれ送信し、
上記荷物運搬車補助制御手段が、上記距離検出用信号受信手段で第2の距離検出用信号を受信すると荷物運搬車のアラーム装置にアラーム発生信号を出力し、第1の距離検出用信号を受信すると上記荷物運搬車の駆動装置に駆動停止信号を出力する、
ことを特徴とする請求項1に記載の荷物用エレベータシステム。
【請求項3】
上記エレベータドアのドア位置から全開状態を検出して全開信号を出力するドア位置検出手段をさらに備え、上記距離検出用信号送信手段が、上記ドア位置検出手段からの全開信号がない時に距離検出用信号を送信することを特徴とする請求項1又は2に記載の荷物用エレベータシステム。
【請求項4】
上記エレベータドアがかごドアと、各階の乗場ドアを含むことを特徴とする請求項1から3までのいずれか1項に記載の荷物用エレベータシステム。
【請求項5】
上記エレベータドアがかごドアと、各階床で上記かごドアと係合機構により連動して開閉動作する各階の乗場ドアを含み、上記ドア位置検出手段が上記かごドアに設けられており、各階床の乗場側では上記距離検出用信号送信手段が上記かごドアに設けられ上記ドア位置検出手段からの全開信号をエレベータ制御盤を介して得ることを特徴とする請求項3に記載の荷物用エレベータシステム。
【図1】


【図2】

【図3】

【図4】
【図2】
【図3】
【図4】
【公開番号】特開2008−56404(P2008−56404A)
【公開日】平成20年3月13日(2008.3.13)
【国際特許分類】
【出願番号】特願2006−233970(P2006−233970)
【出願日】平成18年8月30日(2006.8.30)
【出願人】(000236056)三菱電機ビルテクノサービス株式会社 (1,792)
【Fターム(参考)】
【公開日】平成20年3月13日(2008.3.13)
【国際特許分類】
【出願日】平成18年8月30日(2006.8.30)
【出願人】(000236056)三菱電機ビルテクノサービス株式会社 (1,792)
【Fターム(参考)】
[ Back to top ]