
転がり直動要素用稼働状態監視装置および転がり直動要素の稼働状態監視方法
【課題】転動体を介して往復動を繰り返す転がり直動要素の稼働状態を監視するに際し、別途の装置や設定を不要としつつも、測定のタイミングを一定にする。
【解決手段】この稼働状態監視装置は、一の振動加速度センサ4から取得される加速度信号から、極低周波成分を通過させる第一フィルタ11を経た振動データに基づきトリガ信号を生成するとともに、前記極低周波成分よりも通過させる周波数の高い第二フィルタ12を経た周波数成分に基づいた監視情報を取得し、その監視情報のうち前記トリガ信号に基づいて切り出した稼働状態判断情報から前記転がり直動要素の稼働状態を判断する。
【解決手段】この稼働状態監視装置は、一の振動加速度センサ4から取得される加速度信号から、極低周波成分を通過させる第一フィルタ11を経た振動データに基づきトリガ信号を生成するとともに、前記極低周波成分よりも通過させる周波数の高い第二フィルタ12を経た周波数成分に基づいた監視情報を取得し、その監視情報のうち前記トリガ信号に基づいて切り出した稼働状態判断情報から前記転がり直動要素の稼働状態を判断する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、転がり直動要素用稼働状態監視装置および転がり直動要素の稼働状態監視方法に関する。
【背景技術】
【0002】
ボールねじやリニアガイドのように、転動体を介して可動部材と被可動部材とが相対移動をする転がり直動要素の稼働状態を監視する方法において、転がり直動要素の振動を検出し、その検出された振動データを基に異常等を検出する方法が従来から提案されている。
この種の異常検出方法においては、検出する振動強度が予め定められた閾値を超えて増大することによって異常と判断する方法が提案されている。前記閾値は、初期状態の異常が発生していない時点での振動強度のn倍値とされることが一般的である(例えば特許文献1、2参照)。また、振動データの時間波形を利用して転動体の通過周期のバラツキを評価して異常の有無を判定する方法が提案されている(例えば特許文献3参照)。いずれの従来例においても、走行中の転がり直動要素の振動を測定することによって異常を判定するとしている。
【0003】
しかし、ボールねじやリニアガイドのように往復動を繰り返す転がり直動要素においては、常に定常速度で走行しているのではなく、停止と加減速を繰り返しており、速度が変動する。そのため、走行中の振動検出のタイミングによって振動強度の増減や、転動体通過周期のバラツキが大きくなる。そこで、上記のように走行中の速度が変動する転がり直動要素の振動測定において、測定のタイミングを一定にするために近接センサを用いる例がある(例えば特許文献4参照)。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2009−198398号公報
【特許文献2】特開2009−040364号公報
【特許文献3】特開2009−257806号公報
【特許文献4】特開2004−20521号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
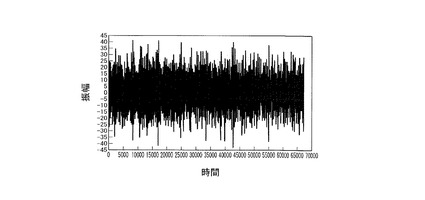
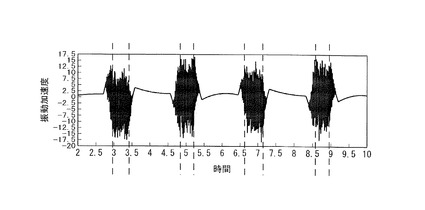
特許文献4に類する、停止と加減速を繰り返し駆動されるボールねじに対し、振動加速度センサによってボールねじの振動を測定した原振動測定データの一例を図3に示す。
この振動測定の結果によれば、振動加速度センサによってボールねじの振動を測定した場合、同図に示すように、停止、加速、定常速度運転、減速、停止のようなそれぞれの時点での運動パターン時の測定結果を含んだ振動測定データが得られることになる。そのため、この原振動測定データをそのまま異常の判定に用いる場合、データの切出し方により振動強度の結果が変る。しかし、安定した測定を行なう上では、定常速度運転時のみの振動測定データを切り出して用いることが望ましい。
【0006】
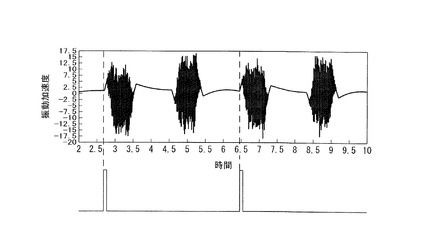
ここで、定常速度運転時のみの振動データを切り出すには、例えば特許文献4に記載される例では近接センサを用い、図9に示す点線部間の振動信号のみを測定する方法が開示される。あるいは例えば図10に示すように、駆動モータなどから何らかのタイミング信号を出力する設定としてそれを振動測定系で受け取り、さらに、定められた加速時間また
は定常速度運転時間などのパラメータを予め入力しておき、定常速度運転時のみの振動データを切り出した後に、振動強度を算出して異常を判定する方法がある。
【0007】
しかしながら、図9に示すような、特許文献4に記載される従来の例の場合では、近接センサを用い、転がり直動要素を駆動させる系以外のタイミング検出信号を必要とするため、測定に費やすコストが増大する。さらに、近接センサを用いても転がり直動要素の進行方向は読みとれないため、進行方向によって振動に差異がある場合には、安定した測定とはならない。また、図10に示したように、転がり直動要素の駆動系から運転速度信号やパルス等を出力し、その出力された信号などを用いて測定のタイミングを一定にすることも考えられるが、いずれの場合でも、駆動系からの信号系の設定が別途に必要である。
【0008】
そこで、本発明は、このような問題点に着目してなされたものであって、転動体を介して可動部材と被可動部材とが相対的に往復動を繰り返す転がり直動要素の稼働状態を監視するに際し、別途の装置や信号系の設定を不要としつつも、測定のタイミングを一定にし得る転がり直動要素用稼働状態監視装置および転がり直動要素の稼働状態監視方法を提供することを目的としている。
【課題を解決するための手段】
【0009】
上記課題を解決するために、本発明のうち第一の発明は、転動体を介して可動部材と被可動部材とが相対的に往復動を繰り返す転がり直動要素の稼働状態を一の振動加速度センサを用いた振動測定に基づいて監視する稼働状態監視装置であって、監視すべきタイミングを得るためのトリガ信号を、前記一の振動加速度センサから取得される加速度信号から第一の濾波手段を経た低周波成分に基づいて取得するトリガ信号取得手段と、前記転がり直動要素の稼働状態を監視するための監視情報を、前記第一の濾波手段を経た低周波成分よりも通過させる周波数の高い第二の濾波手段を経た周波数成分に基づいて取得する監視情報取得手段と、前記監視情報のうち前記トリガ信号に基づいて切り出した稼働状態判断情報から前記転がり直動要素の稼働状態を判断する稼働状態判断手段とを有することを特徴とする。
ここで、第一の発明に係る転がり直動要素の稼働状態監視装置において、前記トリガ信号取得手段は、前記一の振動加速度センサから取得される加速度信号のうち当該振動加速度センサ自身の加減速時の加速度信号を含む極低周波成分を限って取得することは好ましい。
【0010】
また、前記監視情報取得手段は、前記極低周波成分よりも高い周波数成分且つ当該監視する転がり直動要素の系の固有振動数未満の周波数成分を限って取得することは好ましい。
さらに、上記課題を解決するために、本発明のうち第二の発明は、転動体を介して可動部材と被可動部材とが相対的に往復動を繰り返す転がり直動要素の稼働状態を一の振動加速度センサを用いた振動測定に基づいて監視する方法であって、監視すべきタイミングを得るためのトリガ信号を、前記一の振動加速度センサから取得される加速度信号から第一の濾波工程を経た低周波成分に基づいて取得するトリガ信号取得工程と、前記転がり直動要素の稼働状態を監視するための監視情報を、前記第一の濾波工程を経た低周波成分よりも通過させる周波数の高い第二の濾波工程を経た周波数成分に基づいて取得する監視情報取得工程と、前記監視情報のうち前記トリガ信号に基づいて切り出した稼働状態判断情報から前記転がり直動要素の稼働状態を判断する稼働状態判断工程とを含むことを特徴とする。
【発明の効果】
【0011】
本発明によれば、転動体を介して可動部材と被可動部材とが相対的に往復動を繰り返す転がり直動要素の稼働状態を監視するに際し、転がり直動要素の稼働状態を一の振動加速
度センサを用いた振動測定に基づいて監視し、監視すべきタイミングを得るためのトリガ信号を、前記一の振動加速度センサから取得される加速度信号から第一の濾波手段を経た低周波成分に基づいて取得するので、定常速度運転時のみの振動測定データを切り出して用いることが可能となり、測定のタイミングを一定にすることができる。
【0012】
そして、監視情報についても、前記一の振動加速度センサから取得される加速度信号から第一の濾波手段を経た低周波成分よりも通過させる周波数の高い第二の濾波手段を経た周波数成分に基づいて取得するので、別途の装置や信号系の設定が不要であり、前記監視情報のうち前記トリガ信号に基づいて切り出した稼働状態判断情報から前記転がり直動要素の稼働状態を判断するため、別途の装置や設定を不要としつつも、測定のタイミングを一定にすることができる。
【図面の簡単な説明】
【0013】
【図1】本発明の稼働状態監視装置を付設した転がり直動要素の第一実施形態に係る稼働状態監視装置とボールねじを示す図である。
【図2】第一実施形態に係る稼働状態監視装置を説明する機能ブロック図である。
【図3】振動加速度センサから得られる、往復動を繰り返す転がり直動要素の原振動測定データの一例を示す図である。
【図4】移動距離、速度、加速度と時間との関係を示す模式図である。
【図5】図3の原振動測定データに対し、本発明に係る第一の濾波手段(第一の濾波工程)を経た振動測定データの一例を示す図である。
【図6】図3の原振動測定データに対し、第一の濾波手段(第一の濾波工程)を経た振動測定データに基づく所定の閾値でトリガを掛けて切り出した振動測定データ(監視情報)の一例を示す図である。
【図7】本発明に係る第二の濾波手段(第二の濾波工程)を経た振動測定データ(稼働状態判断情報)の経時変化を示す図である。
【図8】本発明の稼働状態監視装置を付設した転がり直動要素の第二実施形態に係る稼働状態監視装置とボールねじおよびリニアガイドを示す図である。
【図9】図3の原振動測定データからの従来の測定データの切り出し方の一例を説明する図である。
【図10】図3の原振動測定データからの従来の測定データの切り出し方の一例を説明する図である。
【発明を実施するための形態】
【0014】
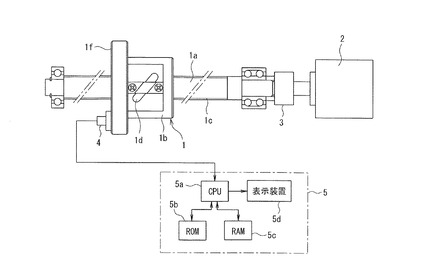
以下、本発明の一実施形態について、図面を適宜参照しつつ説明する。なお、図1は、転動体を介して可動部材と被可動部材とが相対的に往復動を繰り返す転がり直動要素としてのボールねじに本発明の稼働状態監視装置を適用した例である。
同図に示すように、このボールねじ1のねじ軸1aには、ボールねじ1を駆動する駆動モータ2の回転軸がカップリング3を介して連結されている。ボールねじ1のねじ軸1aは、螺旋状のボール軌道溝(以下、「軸側軌道溝」という)1cを外周面に有している。この軸側軌道溝1cは相対的な可動部材としてのナット1bの内周面に形成された不図示の螺旋状のボール軌道溝(以下、「ナット側軌道溝」という)と対向しており、軸側軌道溝1cとナット側軌道溝との間には、転動体として多数のボール(不図示)が転動自在に組み込まれている。これら多数のボールは、ねじ軸1a(またはナット1b)の回転運動に伴って軸側軌道溝1cとナット側軌道溝との間を転動するようになっており、軸側軌道溝1cとナット側軌道溝との間を転動したボールは、ナット1bに組み付けられたボール循環チューブ1dに導入され、このボール循環チューブ1dを経由して元の位置に戻されるようになっている。
【0015】
ここで、この例では、ナット1bに対して不図示の移動テーブルがナット1bとともに
往復移動するように連結されており、また、ボールねじのナットフランジ端面1fに振動加速度センサ4を付設している。なお、振動加速度センサ4の付設位置や姿勢は、この例に限定されず、進行方向の振動加速度を読みとることができれば振動加速度センサ4の取付け位置や取付け方法は適宜設定することができる。
【0016】
そして、この振動加速度センサ4から出力された加速度信号は、稼働状態監視装置5に供給されるようになっている。この稼働状態監視装置5は、中央演算処理装置(CPU)5a、リードオンリメモリ(ROM)5b、ランダムアクセスメモリ(RAM)5c、および表示装置5d等を有して構成されており、CPU5aは図2に示す機能ブロック図に従ってボールねじ1の作動状態を監視している。
【0017】
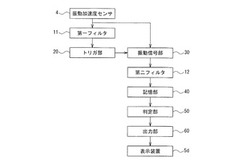
詳しくは、図2に示すように、振動加速度センサ4から得られる、往復動を繰り返す転がり直動要素の原振動測定データ(図3参照)は、第一フィルタ11および第二フィルタ12によって濾波されるようになっている。
ここで、このボールねじ1(転がり直動要素)は、停止や加減速を繰り返す運転をするので、振動加速度センサ4から得られる原振動測定データ(図3参照)には、ボールの転がり運動によって発生した振動に加え、自身の加減速時の加速度信号(図4参照)も含まれている。なお、図4に示すように、加速度信号として、加速時にはプラス、減速時にはマイナスの加速度が発生し、定常速度運転時には加速度は発生しない。
【0018】
ただし、実際にボールねじ1(転がり直動要素)の振動を、振動加速度センサ4を用いて測定した場合、定常速度運転時にはボールねじ1内部で発生する振動、つまり、ボール(転動体)が転動面を転がることにより発生する振動や、循環構造を有することによる循環部または軌道面に転動体が衝突を繰り返すことによって発生する振動が含まれる。そのため、図3に示したように、ボールねじ1の停止時以外には常に振動加速度が発生している。また、進行方向によって、必ずしも同一の振動信号が測定されないので、進行方向を判別する必要がある。
【0019】
そこで、この稼働状態監視装置5は、第一フィルタ11においては、図3に示す振動データから図4の模式図に示すような加速度のグラフを得るために、図3の振動データに極低周波成分のみを通過させるバンドパスフィルタもしくはローパスフィルタをかけている。より具体的には、第一フィルタ11は、「停止時を除いて、ボールねじ1が駆動される際に生じる周波数成分のうち、最も低い周波数成分以下」を上限とし、「使用する振動加速度センサ4および稼働状態監視装置5で測定可能な最低周波数以上」を下限とする設定としている。その結果、運転中の振動データから極低周波成分を抜き出すことによって、図5に示すような振動加速度センサ4自身の加減速データを得ることができる。
【0020】
これにより、第一フィルタ11(第一の濾波手段、第一の濾波工程)においては、図5に示すように、自身の加減速時の加速度信号を限って抽出し、続くトリガ部20では、この第一フィルタ11の抽出した振動測定データに対し、例えば加速時、または減速時の加速度の立ち下がり、立ち上がりのエッジをトリガにすることによって、その間の定常速度のタイミングを計ることができるようになっており、その間の振動データを監視情報として用いることによって常に一定のタイミングでの異常判定が可能となる。
【0021】
本実施形態のトリガ部20でのトリガ設定では、加速時または減速時の加速度に対して絶対値としての閾値を設定し(図5での水平方向の実線)、この閾値を超えた時点(図5での垂直方向の破線)をトリガとした。勿論トリガ設定はこれに限らず、例えば、加速度の定常速度運転時の速度や加減速の時定数が予め判っていれば、加速度の勾配を算出することによって勾配の閾値を設定し、加速時または減速時のトリガとすることもできる。
【0022】
また、図5から判るように、この濾波後の振動測定データは、進行方向に対しては、一方向では加速時にプラスの値をとり、減速時にマイナスの値をとる。また、他方向では加速時にマイナスの値をとり、減速時にプラスの値をとる。よって、プラスのタイミングトリガとマイナスのタイミングトリガをカウントすることによって、ボールねじ1の進行方向も判別することができる。したがって、極低周波成分のみを抜き出すことによって、ボールねじ1が停止から加速に入るタイミング、または定常速度から減速に入るタイミングが明確に判るようになる。
例えば、振動信号部30において、(1)加速時のタイミングトリガから一定時間の振動測定データを使用する、(2)減速時のタイミングトリガから一定時間遡った振動測定データを使用する、(3)加速時のタイミングトリガから減速時のタイミングトリガまでの間の振動測定データを使用する、などの方法が考えられる。
【0023】
これにより、振動信号部30では、振動加速度センサ4から得られるトリガを掛けた後の振動測定データ(図6参照)を監視情報として切り出すことができ、この切り出された監視情報を、続く第二フィルタ12によって、第一の濾波工程を経た低周波成分よりも通過させる周波数の高い第二の濾波工程を経た周波数成分に基づいて濾波することで稼働状態判断情報を取得する。ここで、この例では、特開2010−60551号公報に開示される異常検知方法に採用されるように、第二フィルタ12で濾波する周波数として、ナット1bに連結された不図示の移動テーブルをインパクト加振し、移動テーブルを質量とするとともに、ナット1bをばねとする、ばね−質量系の固有振動数を求め、これに基づいて第二フィルタ12で濾波する周波数を設定している。なお、第二フィルタ12で濾波する周波数は、第一フィルタ11を経た低周波成分よりも通過させる周波数が高い。
【0024】
そして、記憶部40は、この稼働状態判断情報の結果を外部の記憶領域に保存し、判定部50は、加速時のタイミングトリガと減速時のタイミングトリガとの間のデータのみ(つまり、上記稼働状態判断情報)を用いて、定常速度で運転しているボールねじ1の振動のみを異常判定に用いることが可能となる。
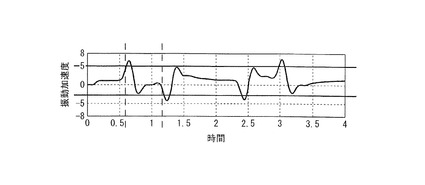
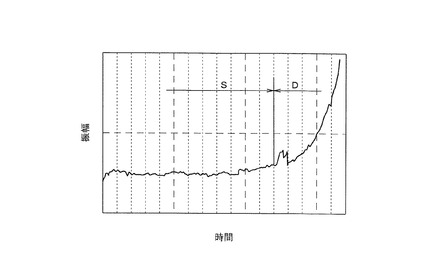
具体的には、図7に一例を示すような経時変化のデータが得られるので、これにより得られた振幅の大きさに基づいて、ボールねじ1が正常駆動範囲(同図での符号S)であるか、異常が発生(同図での符号D)したかを判定することができる。そして、判定部50において稼働状態判断情報に異常があると判定されたとき(図7での符号Dのようなデータが取得されたとき)には、出力部60に向けて異常を表示するための信号が表示装置5dに出力され、表示装置5dに必要な表示がなされる。
【0025】
次に、この稼働状態監視装置5およびボールねじ1(転がり直動要素)の稼働状態監視方法の作用・効果について説明する。
この稼働状態監視装置5および稼働状態監視方法によれば、ボールねじ1の稼働状態を監視するに際し、ボールねじ1の稼働状態を一の振動加速度センサ4を用いた振動測定に基づいて監視し、監視すべきタイミングを得るためのトリガ信号を、前記一の振動加速度センサ4から取得される加速度信号から第一フィルタ11(第一の濾波手段)を経た極低周波成分に基づいて取得するので、極低周波成分のみを抜き出すことによって、ボールねじ1が停止から加速に入るタイミング、または定常速度から減速に入るタイミングが明確に判る。そして、この振動データを基にしてトリガ部20でトリガを掛けるため、取得すべき監視情報の測定のタイミングを一定にすることができる。
【0026】
そして、監視情報から得られる稼働状態判断情報についても、前記一の振動加速度センサ4から取得される加速度信号から第一フィルタ11を経た低周波成分よりも通過させる周波数の高い第二フィルタ12(第二の濾波手段)を経た周波数成分に基づいて取得するので、別途の装置や信号系の設定が不要である。
さらに、この稼働状態監視装置5および稼働状態監視方法によれば、振動測定に元々必
要となる振動加速度センサ4からの振動信号以外の信号が不要であるため、別途の装置や信号系の設定を不要として、測定系を簡便にすることが可能である。さらに、常に測定のタイミングを一定にし得るので、安定した測定を実施するもコストアップとならない。
【0027】
なお、本発明に係る転がり直動要素用稼働状態監視装置および転がり直動要素の稼働状態監視方法は、上記実施形態に限定されるものではなく、本発明の趣旨を逸脱しなければ種々の変形が可能である。
例えば、上記実施形態では、転動体を介して可動部材と被可動部材とが相対的に往復動を繰り返す転がり直動要素として、ボールねじに本発明の稼働状態監視装置を適用した例で説明したが、これに限定されず、図8に示す第二実施形態のように、ボールねじとリニアガイドとを組み合わせた場合や、転がり直動要素としてリニアガイドを単独で使用した場合であっても適用可能である。
【0028】
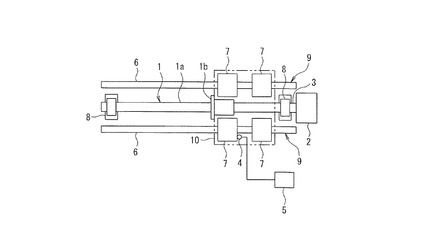
第二実施形態は、図8に示すように、転がり直動要素が、上記第一実施形態同様のボールねじ1および二組のリニアガイド9であり、そのリニアガイド9の複数のスライダ7に支持される移動テーブル10を有して構成されている例である。
詳しくは、各リニアガイド9は、一本の案内レール6に2個のスライダ7がスライド移動可能に跨設されており、この二組のリニアガイド9の計4個のスライダ7で移動テーブル10を支持している。そして、二組のリニアガイド9は、その案内レール6相互が並設されており、これら案内レール6同士の間にボールねじ1が並行に設けられ、そのナット1bのフランジが上記移動テーブル10の一端に締結されている。そして、ねじ軸1aの両端は、軸支部8によって回転自在にそれぞれ支持され、さらに、ねじ軸1aの一端側(同図下側)は、カップリング3を介して駆動用のモータ2の出力軸に連結されている。
【0029】
そして、この例においては、同図に示すように、スライダ7の近傍(この例では移動テーブル10の下面)に、振動加速度センサ4のピックアップを取り付けている。
このような構成であっても、上記第一実施形態同様に、一の振動加速度センサ4から得られる、往復動を繰り返す転がり直動要素の原振動測定データに対し、第一フィルタ11を経た振動測定データに基づく所定の閾値でトリガを掛け、得られた振動測定データを第二フィルタ12で濾波することで、上記同様の作用効果を奏する。なお、この第二実施形態においても、上記第一実施形態同様に、第二フィルタ12で濾波する周波数として、移動テーブル10をインパクト加振し、移動テーブル10を質量とするとともに、計4個のスライダ7をばねとする、ばね−質量系の固有振動数を求め、これに基づいて第二フィルタ12を設定している。
【符号の説明】
【0030】
1 ボールねじ(転がり直動要素)
2 駆動モータ
3 カップリング
4 振動加速度センサ
5 稼働状態監視装置
11 第一フィルタ(第一の濾波手段、第一の濾波工程)
12 第二フィルタ(第二の濾波手段、第二の濾波工程)
20 トリガ部
30 振動信号部
40 記憶部
50 判定部
60 出力部
【技術分野】
【0001】
本発明は、転がり直動要素用稼働状態監視装置および転がり直動要素の稼働状態監視方法に関する。
【背景技術】
【0002】
ボールねじやリニアガイドのように、転動体を介して可動部材と被可動部材とが相対移動をする転がり直動要素の稼働状態を監視する方法において、転がり直動要素の振動を検出し、その検出された振動データを基に異常等を検出する方法が従来から提案されている。
この種の異常検出方法においては、検出する振動強度が予め定められた閾値を超えて増大することによって異常と判断する方法が提案されている。前記閾値は、初期状態の異常が発生していない時点での振動強度のn倍値とされることが一般的である(例えば特許文献1、2参照)。また、振動データの時間波形を利用して転動体の通過周期のバラツキを評価して異常の有無を判定する方法が提案されている(例えば特許文献3参照)。いずれの従来例においても、走行中の転がり直動要素の振動を測定することによって異常を判定するとしている。
【0003】
しかし、ボールねじやリニアガイドのように往復動を繰り返す転がり直動要素においては、常に定常速度で走行しているのではなく、停止と加減速を繰り返しており、速度が変動する。そのため、走行中の振動検出のタイミングによって振動強度の増減や、転動体通過周期のバラツキが大きくなる。そこで、上記のように走行中の速度が変動する転がり直動要素の振動測定において、測定のタイミングを一定にするために近接センサを用いる例がある(例えば特許文献4参照)。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2009−198398号公報
【特許文献2】特開2009−040364号公報
【特許文献3】特開2009−257806号公報
【特許文献4】特開2004−20521号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
特許文献4に類する、停止と加減速を繰り返し駆動されるボールねじに対し、振動加速度センサによってボールねじの振動を測定した原振動測定データの一例を図3に示す。
この振動測定の結果によれば、振動加速度センサによってボールねじの振動を測定した場合、同図に示すように、停止、加速、定常速度運転、減速、停止のようなそれぞれの時点での運動パターン時の測定結果を含んだ振動測定データが得られることになる。そのため、この原振動測定データをそのまま異常の判定に用いる場合、データの切出し方により振動強度の結果が変る。しかし、安定した測定を行なう上では、定常速度運転時のみの振動測定データを切り出して用いることが望ましい。
【0006】
ここで、定常速度運転時のみの振動データを切り出すには、例えば特許文献4に記載される例では近接センサを用い、図9に示す点線部間の振動信号のみを測定する方法が開示される。あるいは例えば図10に示すように、駆動モータなどから何らかのタイミング信号を出力する設定としてそれを振動測定系で受け取り、さらに、定められた加速時間また
は定常速度運転時間などのパラメータを予め入力しておき、定常速度運転時のみの振動データを切り出した後に、振動強度を算出して異常を判定する方法がある。
【0007】
しかしながら、図9に示すような、特許文献4に記載される従来の例の場合では、近接センサを用い、転がり直動要素を駆動させる系以外のタイミング検出信号を必要とするため、測定に費やすコストが増大する。さらに、近接センサを用いても転がり直動要素の進行方向は読みとれないため、進行方向によって振動に差異がある場合には、安定した測定とはならない。また、図10に示したように、転がり直動要素の駆動系から運転速度信号やパルス等を出力し、その出力された信号などを用いて測定のタイミングを一定にすることも考えられるが、いずれの場合でも、駆動系からの信号系の設定が別途に必要である。
【0008】
そこで、本発明は、このような問題点に着目してなされたものであって、転動体を介して可動部材と被可動部材とが相対的に往復動を繰り返す転がり直動要素の稼働状態を監視するに際し、別途の装置や信号系の設定を不要としつつも、測定のタイミングを一定にし得る転がり直動要素用稼働状態監視装置および転がり直動要素の稼働状態監視方法を提供することを目的としている。
【課題を解決するための手段】
【0009】
上記課題を解決するために、本発明のうち第一の発明は、転動体を介して可動部材と被可動部材とが相対的に往復動を繰り返す転がり直動要素の稼働状態を一の振動加速度センサを用いた振動測定に基づいて監視する稼働状態監視装置であって、監視すべきタイミングを得るためのトリガ信号を、前記一の振動加速度センサから取得される加速度信号から第一の濾波手段を経た低周波成分に基づいて取得するトリガ信号取得手段と、前記転がり直動要素の稼働状態を監視するための監視情報を、前記第一の濾波手段を経た低周波成分よりも通過させる周波数の高い第二の濾波手段を経た周波数成分に基づいて取得する監視情報取得手段と、前記監視情報のうち前記トリガ信号に基づいて切り出した稼働状態判断情報から前記転がり直動要素の稼働状態を判断する稼働状態判断手段とを有することを特徴とする。
ここで、第一の発明に係る転がり直動要素の稼働状態監視装置において、前記トリガ信号取得手段は、前記一の振動加速度センサから取得される加速度信号のうち当該振動加速度センサ自身の加減速時の加速度信号を含む極低周波成分を限って取得することは好ましい。
【0010】
また、前記監視情報取得手段は、前記極低周波成分よりも高い周波数成分且つ当該監視する転がり直動要素の系の固有振動数未満の周波数成分を限って取得することは好ましい。
さらに、上記課題を解決するために、本発明のうち第二の発明は、転動体を介して可動部材と被可動部材とが相対的に往復動を繰り返す転がり直動要素の稼働状態を一の振動加速度センサを用いた振動測定に基づいて監視する方法であって、監視すべきタイミングを得るためのトリガ信号を、前記一の振動加速度センサから取得される加速度信号から第一の濾波工程を経た低周波成分に基づいて取得するトリガ信号取得工程と、前記転がり直動要素の稼働状態を監視するための監視情報を、前記第一の濾波工程を経た低周波成分よりも通過させる周波数の高い第二の濾波工程を経た周波数成分に基づいて取得する監視情報取得工程と、前記監視情報のうち前記トリガ信号に基づいて切り出した稼働状態判断情報から前記転がり直動要素の稼働状態を判断する稼働状態判断工程とを含むことを特徴とする。
【発明の効果】
【0011】
本発明によれば、転動体を介して可動部材と被可動部材とが相対的に往復動を繰り返す転がり直動要素の稼働状態を監視するに際し、転がり直動要素の稼働状態を一の振動加速
度センサを用いた振動測定に基づいて監視し、監視すべきタイミングを得るためのトリガ信号を、前記一の振動加速度センサから取得される加速度信号から第一の濾波手段を経た低周波成分に基づいて取得するので、定常速度運転時のみの振動測定データを切り出して用いることが可能となり、測定のタイミングを一定にすることができる。
【0012】
そして、監視情報についても、前記一の振動加速度センサから取得される加速度信号から第一の濾波手段を経た低周波成分よりも通過させる周波数の高い第二の濾波手段を経た周波数成分に基づいて取得するので、別途の装置や信号系の設定が不要であり、前記監視情報のうち前記トリガ信号に基づいて切り出した稼働状態判断情報から前記転がり直動要素の稼働状態を判断するため、別途の装置や設定を不要としつつも、測定のタイミングを一定にすることができる。
【図面の簡単な説明】
【0013】
【図1】本発明の稼働状態監視装置を付設した転がり直動要素の第一実施形態に係る稼働状態監視装置とボールねじを示す図である。
【図2】第一実施形態に係る稼働状態監視装置を説明する機能ブロック図である。
【図3】振動加速度センサから得られる、往復動を繰り返す転がり直動要素の原振動測定データの一例を示す図である。
【図4】移動距離、速度、加速度と時間との関係を示す模式図である。
【図5】図3の原振動測定データに対し、本発明に係る第一の濾波手段(第一の濾波工程)を経た振動測定データの一例を示す図である。
【図6】図3の原振動測定データに対し、第一の濾波手段(第一の濾波工程)を経た振動測定データに基づく所定の閾値でトリガを掛けて切り出した振動測定データ(監視情報)の一例を示す図である。
【図7】本発明に係る第二の濾波手段(第二の濾波工程)を経た振動測定データ(稼働状態判断情報)の経時変化を示す図である。
【図8】本発明の稼働状態監視装置を付設した転がり直動要素の第二実施形態に係る稼働状態監視装置とボールねじおよびリニアガイドを示す図である。
【図9】図3の原振動測定データからの従来の測定データの切り出し方の一例を説明する図である。
【図10】図3の原振動測定データからの従来の測定データの切り出し方の一例を説明する図である。
【発明を実施するための形態】
【0014】
以下、本発明の一実施形態について、図面を適宜参照しつつ説明する。なお、図1は、転動体を介して可動部材と被可動部材とが相対的に往復動を繰り返す転がり直動要素としてのボールねじに本発明の稼働状態監視装置を適用した例である。
同図に示すように、このボールねじ1のねじ軸1aには、ボールねじ1を駆動する駆動モータ2の回転軸がカップリング3を介して連結されている。ボールねじ1のねじ軸1aは、螺旋状のボール軌道溝(以下、「軸側軌道溝」という)1cを外周面に有している。この軸側軌道溝1cは相対的な可動部材としてのナット1bの内周面に形成された不図示の螺旋状のボール軌道溝(以下、「ナット側軌道溝」という)と対向しており、軸側軌道溝1cとナット側軌道溝との間には、転動体として多数のボール(不図示)が転動自在に組み込まれている。これら多数のボールは、ねじ軸1a(またはナット1b)の回転運動に伴って軸側軌道溝1cとナット側軌道溝との間を転動するようになっており、軸側軌道溝1cとナット側軌道溝との間を転動したボールは、ナット1bに組み付けられたボール循環チューブ1dに導入され、このボール循環チューブ1dを経由して元の位置に戻されるようになっている。
【0015】
ここで、この例では、ナット1bに対して不図示の移動テーブルがナット1bとともに
往復移動するように連結されており、また、ボールねじのナットフランジ端面1fに振動加速度センサ4を付設している。なお、振動加速度センサ4の付設位置や姿勢は、この例に限定されず、進行方向の振動加速度を読みとることができれば振動加速度センサ4の取付け位置や取付け方法は適宜設定することができる。
【0016】
そして、この振動加速度センサ4から出力された加速度信号は、稼働状態監視装置5に供給されるようになっている。この稼働状態監視装置5は、中央演算処理装置(CPU)5a、リードオンリメモリ(ROM)5b、ランダムアクセスメモリ(RAM)5c、および表示装置5d等を有して構成されており、CPU5aは図2に示す機能ブロック図に従ってボールねじ1の作動状態を監視している。
【0017】
詳しくは、図2に示すように、振動加速度センサ4から得られる、往復動を繰り返す転がり直動要素の原振動測定データ(図3参照)は、第一フィルタ11および第二フィルタ12によって濾波されるようになっている。
ここで、このボールねじ1(転がり直動要素)は、停止や加減速を繰り返す運転をするので、振動加速度センサ4から得られる原振動測定データ(図3参照)には、ボールの転がり運動によって発生した振動に加え、自身の加減速時の加速度信号(図4参照)も含まれている。なお、図4に示すように、加速度信号として、加速時にはプラス、減速時にはマイナスの加速度が発生し、定常速度運転時には加速度は発生しない。
【0018】
ただし、実際にボールねじ1(転がり直動要素)の振動を、振動加速度センサ4を用いて測定した場合、定常速度運転時にはボールねじ1内部で発生する振動、つまり、ボール(転動体)が転動面を転がることにより発生する振動や、循環構造を有することによる循環部または軌道面に転動体が衝突を繰り返すことによって発生する振動が含まれる。そのため、図3に示したように、ボールねじ1の停止時以外には常に振動加速度が発生している。また、進行方向によって、必ずしも同一の振動信号が測定されないので、進行方向を判別する必要がある。
【0019】
そこで、この稼働状態監視装置5は、第一フィルタ11においては、図3に示す振動データから図4の模式図に示すような加速度のグラフを得るために、図3の振動データに極低周波成分のみを通過させるバンドパスフィルタもしくはローパスフィルタをかけている。より具体的には、第一フィルタ11は、「停止時を除いて、ボールねじ1が駆動される際に生じる周波数成分のうち、最も低い周波数成分以下」を上限とし、「使用する振動加速度センサ4および稼働状態監視装置5で測定可能な最低周波数以上」を下限とする設定としている。その結果、運転中の振動データから極低周波成分を抜き出すことによって、図5に示すような振動加速度センサ4自身の加減速データを得ることができる。
【0020】
これにより、第一フィルタ11(第一の濾波手段、第一の濾波工程)においては、図5に示すように、自身の加減速時の加速度信号を限って抽出し、続くトリガ部20では、この第一フィルタ11の抽出した振動測定データに対し、例えば加速時、または減速時の加速度の立ち下がり、立ち上がりのエッジをトリガにすることによって、その間の定常速度のタイミングを計ることができるようになっており、その間の振動データを監視情報として用いることによって常に一定のタイミングでの異常判定が可能となる。
【0021】
本実施形態のトリガ部20でのトリガ設定では、加速時または減速時の加速度に対して絶対値としての閾値を設定し(図5での水平方向の実線)、この閾値を超えた時点(図5での垂直方向の破線)をトリガとした。勿論トリガ設定はこれに限らず、例えば、加速度の定常速度運転時の速度や加減速の時定数が予め判っていれば、加速度の勾配を算出することによって勾配の閾値を設定し、加速時または減速時のトリガとすることもできる。
【0022】
また、図5から判るように、この濾波後の振動測定データは、進行方向に対しては、一方向では加速時にプラスの値をとり、減速時にマイナスの値をとる。また、他方向では加速時にマイナスの値をとり、減速時にプラスの値をとる。よって、プラスのタイミングトリガとマイナスのタイミングトリガをカウントすることによって、ボールねじ1の進行方向も判別することができる。したがって、極低周波成分のみを抜き出すことによって、ボールねじ1が停止から加速に入るタイミング、または定常速度から減速に入るタイミングが明確に判るようになる。
例えば、振動信号部30において、(1)加速時のタイミングトリガから一定時間の振動測定データを使用する、(2)減速時のタイミングトリガから一定時間遡った振動測定データを使用する、(3)加速時のタイミングトリガから減速時のタイミングトリガまでの間の振動測定データを使用する、などの方法が考えられる。
【0023】
これにより、振動信号部30では、振動加速度センサ4から得られるトリガを掛けた後の振動測定データ(図6参照)を監視情報として切り出すことができ、この切り出された監視情報を、続く第二フィルタ12によって、第一の濾波工程を経た低周波成分よりも通過させる周波数の高い第二の濾波工程を経た周波数成分に基づいて濾波することで稼働状態判断情報を取得する。ここで、この例では、特開2010−60551号公報に開示される異常検知方法に採用されるように、第二フィルタ12で濾波する周波数として、ナット1bに連結された不図示の移動テーブルをインパクト加振し、移動テーブルを質量とするとともに、ナット1bをばねとする、ばね−質量系の固有振動数を求め、これに基づいて第二フィルタ12で濾波する周波数を設定している。なお、第二フィルタ12で濾波する周波数は、第一フィルタ11を経た低周波成分よりも通過させる周波数が高い。
【0024】
そして、記憶部40は、この稼働状態判断情報の結果を外部の記憶領域に保存し、判定部50は、加速時のタイミングトリガと減速時のタイミングトリガとの間のデータのみ(つまり、上記稼働状態判断情報)を用いて、定常速度で運転しているボールねじ1の振動のみを異常判定に用いることが可能となる。
具体的には、図7に一例を示すような経時変化のデータが得られるので、これにより得られた振幅の大きさに基づいて、ボールねじ1が正常駆動範囲(同図での符号S)であるか、異常が発生(同図での符号D)したかを判定することができる。そして、判定部50において稼働状態判断情報に異常があると判定されたとき(図7での符号Dのようなデータが取得されたとき)には、出力部60に向けて異常を表示するための信号が表示装置5dに出力され、表示装置5dに必要な表示がなされる。
【0025】
次に、この稼働状態監視装置5およびボールねじ1(転がり直動要素)の稼働状態監視方法の作用・効果について説明する。
この稼働状態監視装置5および稼働状態監視方法によれば、ボールねじ1の稼働状態を監視するに際し、ボールねじ1の稼働状態を一の振動加速度センサ4を用いた振動測定に基づいて監視し、監視すべきタイミングを得るためのトリガ信号を、前記一の振動加速度センサ4から取得される加速度信号から第一フィルタ11(第一の濾波手段)を経た極低周波成分に基づいて取得するので、極低周波成分のみを抜き出すことによって、ボールねじ1が停止から加速に入るタイミング、または定常速度から減速に入るタイミングが明確に判る。そして、この振動データを基にしてトリガ部20でトリガを掛けるため、取得すべき監視情報の測定のタイミングを一定にすることができる。
【0026】
そして、監視情報から得られる稼働状態判断情報についても、前記一の振動加速度センサ4から取得される加速度信号から第一フィルタ11を経た低周波成分よりも通過させる周波数の高い第二フィルタ12(第二の濾波手段)を経た周波数成分に基づいて取得するので、別途の装置や信号系の設定が不要である。
さらに、この稼働状態監視装置5および稼働状態監視方法によれば、振動測定に元々必
要となる振動加速度センサ4からの振動信号以外の信号が不要であるため、別途の装置や信号系の設定を不要として、測定系を簡便にすることが可能である。さらに、常に測定のタイミングを一定にし得るので、安定した測定を実施するもコストアップとならない。
【0027】
なお、本発明に係る転がり直動要素用稼働状態監視装置および転がり直動要素の稼働状態監視方法は、上記実施形態に限定されるものではなく、本発明の趣旨を逸脱しなければ種々の変形が可能である。
例えば、上記実施形態では、転動体を介して可動部材と被可動部材とが相対的に往復動を繰り返す転がり直動要素として、ボールねじに本発明の稼働状態監視装置を適用した例で説明したが、これに限定されず、図8に示す第二実施形態のように、ボールねじとリニアガイドとを組み合わせた場合や、転がり直動要素としてリニアガイドを単独で使用した場合であっても適用可能である。
【0028】
第二実施形態は、図8に示すように、転がり直動要素が、上記第一実施形態同様のボールねじ1および二組のリニアガイド9であり、そのリニアガイド9の複数のスライダ7に支持される移動テーブル10を有して構成されている例である。
詳しくは、各リニアガイド9は、一本の案内レール6に2個のスライダ7がスライド移動可能に跨設されており、この二組のリニアガイド9の計4個のスライダ7で移動テーブル10を支持している。そして、二組のリニアガイド9は、その案内レール6相互が並設されており、これら案内レール6同士の間にボールねじ1が並行に設けられ、そのナット1bのフランジが上記移動テーブル10の一端に締結されている。そして、ねじ軸1aの両端は、軸支部8によって回転自在にそれぞれ支持され、さらに、ねじ軸1aの一端側(同図下側)は、カップリング3を介して駆動用のモータ2の出力軸に連結されている。
【0029】
そして、この例においては、同図に示すように、スライダ7の近傍(この例では移動テーブル10の下面)に、振動加速度センサ4のピックアップを取り付けている。
このような構成であっても、上記第一実施形態同様に、一の振動加速度センサ4から得られる、往復動を繰り返す転がり直動要素の原振動測定データに対し、第一フィルタ11を経た振動測定データに基づく所定の閾値でトリガを掛け、得られた振動測定データを第二フィルタ12で濾波することで、上記同様の作用効果を奏する。なお、この第二実施形態においても、上記第一実施形態同様に、第二フィルタ12で濾波する周波数として、移動テーブル10をインパクト加振し、移動テーブル10を質量とするとともに、計4個のスライダ7をばねとする、ばね−質量系の固有振動数を求め、これに基づいて第二フィルタ12を設定している。
【符号の説明】
【0030】
1 ボールねじ(転がり直動要素)
2 駆動モータ
3 カップリング
4 振動加速度センサ
5 稼働状態監視装置
11 第一フィルタ(第一の濾波手段、第一の濾波工程)
12 第二フィルタ(第二の濾波手段、第二の濾波工程)
20 トリガ部
30 振動信号部
40 記憶部
50 判定部
60 出力部
【特許請求の範囲】
【請求項1】
転動体を介して可動部材と被可動部材とが相対的に往復動を繰り返す転がり直動要素の稼働状態を一の振動加速度センサを用いた振動測定に基づいて監視する稼働状態監視装置であって、
監視すべきタイミングを得るためのトリガ信号を、前記一の振動加速度センサから取得される加速度信号から第一の濾波手段を経た低周波成分に基づいて取得するトリガ信号取得手段と、
前記転がり直動要素の稼働状態を監視するための監視情報を、前記第一の濾波手段を経た低周波成分よりも通過させる周波数の高い第二の濾波手段を経た周波数成分に基づいて取得する監視情報取得手段と、
前記監視情報のうち前記トリガ信号に基づいて切り出した稼働状態判断情報から前記転がり直動要素の稼働状態を判断する稼働状態判断手段とを有することを特徴とする転がり直動要素用稼働状態監視装置。
【請求項2】
前記トリガ信号取得手段は、前記一の振動加速度センサから取得される加速度信号のうち当該振動加速度センサ自身の加減速時の加速度信号を含む極低周波成分を限って取得することを特徴とする請求項1に記載の転がり直動要素の稼働状態監視装置。
【請求項3】
前記監視情報取得手段は、前記極低周波成分よりも高い周波数成分且つ当該監視する転がり直動要素の系の固有振動数未満の周波数成分を限って取得することを特徴とする請求項2に記載の転がり直動要素の稼働状態監視装置。
【請求項4】
転動体を介して可動部材と被可動部材とが相対的に往復動を繰り返す転がり直動要素の稼働状態を一の振動加速度センサを用いた振動測定に基づいて監視する方法であって、
監視すべきタイミングを得るためのトリガ信号を、前記一の振動加速度センサから取得される加速度信号から第一の濾波工程を経た低周波成分に基づいて取得するトリガ信号取得工程と、
前記転がり直動要素の稼働状態を監視するための監視情報を、前記第一の濾波工程を経た低周波成分よりも通過させる周波数の高い第二の濾波工程を経た周波数成分に基づいて取得する監視情報取得工程と、
前記監視情報のうち前記トリガ信号に基づいて切り出した稼働状態判断情報から前記転がり直動要素の稼働状態を判断する稼働状態判断工程とを含むことを特徴とする転がり直動要素の稼働状態監視方法。
【請求項1】
転動体を介して可動部材と被可動部材とが相対的に往復動を繰り返す転がり直動要素の稼働状態を一の振動加速度センサを用いた振動測定に基づいて監視する稼働状態監視装置であって、
監視すべきタイミングを得るためのトリガ信号を、前記一の振動加速度センサから取得される加速度信号から第一の濾波手段を経た低周波成分に基づいて取得するトリガ信号取得手段と、
前記転がり直動要素の稼働状態を監視するための監視情報を、前記第一の濾波手段を経た低周波成分よりも通過させる周波数の高い第二の濾波手段を経た周波数成分に基づいて取得する監視情報取得手段と、
前記監視情報のうち前記トリガ信号に基づいて切り出した稼働状態判断情報から前記転がり直動要素の稼働状態を判断する稼働状態判断手段とを有することを特徴とする転がり直動要素用稼働状態監視装置。
【請求項2】
前記トリガ信号取得手段は、前記一の振動加速度センサから取得される加速度信号のうち当該振動加速度センサ自身の加減速時の加速度信号を含む極低周波成分を限って取得することを特徴とする請求項1に記載の転がり直動要素の稼働状態監視装置。
【請求項3】
前記監視情報取得手段は、前記極低周波成分よりも高い周波数成分且つ当該監視する転がり直動要素の系の固有振動数未満の周波数成分を限って取得することを特徴とする請求項2に記載の転がり直動要素の稼働状態監視装置。
【請求項4】
転動体を介して可動部材と被可動部材とが相対的に往復動を繰り返す転がり直動要素の稼働状態を一の振動加速度センサを用いた振動測定に基づいて監視する方法であって、
監視すべきタイミングを得るためのトリガ信号を、前記一の振動加速度センサから取得される加速度信号から第一の濾波工程を経た低周波成分に基づいて取得するトリガ信号取得工程と、
前記転がり直動要素の稼働状態を監視するための監視情報を、前記第一の濾波工程を経た低周波成分よりも通過させる周波数の高い第二の濾波工程を経た周波数成分に基づいて取得する監視情報取得工程と、
前記監視情報のうち前記トリガ信号に基づいて切り出した稼働状態判断情報から前記転がり直動要素の稼働状態を判断する稼働状態判断工程とを含むことを特徴とする転がり直動要素の稼働状態監視方法。
【図1】


【図2】

【図3】

【図4】

【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2012−98213(P2012−98213A)
【公開日】平成24年5月24日(2012.5.24)
【国際特許分類】
【出願番号】特願2010−247692(P2010−247692)
【出願日】平成22年11月4日(2010.11.4)
【出願人】(000004204)日本精工株式会社 (8,378)
【Fターム(参考)】
【公開日】平成24年5月24日(2012.5.24)
【国際特許分類】
【出願日】平成22年11月4日(2010.11.4)
【出願人】(000004204)日本精工株式会社 (8,378)
【Fターム(参考)】
[ Back to top ]