
電力系統電圧制御システムおよび電力系統電圧制御方法

【課題】電力系統に配置された複数の電圧制御機器を用いてそれよりも多い制御対象地点の電圧を制御する。
【解決手段】電力系統電圧制御システムは、制御対象地点の電圧値が読み書きされる黒板手段(301)と、黒板手段が保持する制御対象地点の電圧値に基づいて電圧制御機器(10)のそれぞれに係る指標sを計算し、当該計算した指標sに基づいて、制御量を変更すべき電圧制御機器を選択する計算手段(206,306)と、選択された電圧制御機器に対して、制御対象地点の電圧値を引数とする目的関数の値が減少するように制御量を変更する指示をする複数の個別制御装置(20)とを備えている。指標sは、制御対象地点の電圧変化量に対する目的関数の変化量と、電圧制御機器の制御量に対する制御対象地点の電圧変化量と、電圧制御機器が1回の動作で目的関数に与える影響度とに基づいて算出される。
【解決手段】電力系統電圧制御システムは、制御対象地点の電圧値が読み書きされる黒板手段(301)と、黒板手段が保持する制御対象地点の電圧値に基づいて電圧制御機器(10)のそれぞれに係る指標sを計算し、当該計算した指標sに基づいて、制御量を変更すべき電圧制御機器を選択する計算手段(206,306)と、選択された電圧制御機器に対して、制御対象地点の電圧値を引数とする目的関数の値が減少するように制御量を変更する指示をする複数の個別制御装置(20)とを備えている。指標sは、制御対象地点の電圧変化量に対する目的関数の変化量と、電圧制御機器の制御量に対する制御対象地点の電圧変化量と、電圧制御機器が1回の動作で目的関数に与える影響度とに基づいて算出される。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、電力系統における任意の地点の電圧を制御するシステムおよび方法に関する。
【背景技術】
【0002】
各需要家に送られる電力には許容電圧値が定められおり、例えば、日本では低圧側で101±6(95〜107)Vである。よって、電気事業者は各需要家の受電設備に供給される電圧がこの範囲に収まるように電力系統の電圧を制御する必要がある。
【0003】
一般に、電力系統の電圧は送り出し変電所(配電用変電所)から末端に向けて、すなわち、上流から下流に向けて低下する。従来、変電所からの送り出し電圧をLRT(Load Ratio control Transformer:負荷時タップ切替装置付変圧器)などで適切に制御し、かつ柱上変圧器(高圧/低圧)にてタップを変更し、さらに電圧低下が著しい場合にはSVR(Step Voltage Regulator:自動電圧調整器)において電圧を持ち上げるという制御が行われている。SVRは、配電線(フィーダ)に直列に挿入されるタップ切替式の変圧器であり、一次側と二次側の巻線比(変圧比)を変更することで電圧を制御する。通常、SVRは配電線の途中に設置され、自動タップ切替により変圧比を調整することで配電線電圧を規定値以内に維持する。
【0004】
従来の電力系統電圧制御では、LRTおよびSVRなどの電圧制御機器が各地点で個別に動作するため、これら電圧制御機器が直列に複数設置されていると制御が干渉し合って無駄なタップ動作(ハンチング)や逆動作を起こしてしまうことがある。この問題に対して、各電圧制御機器によって制御される電圧の目標電圧からの逸脱量などから算出されるある指標に基づいて各電圧制御機器を集中制御あるいは分散制御することで、電力系統の電圧違反を最小化しつつタップ動作回数も最小化する手法が提案されている(例えば、非特許文献1参照)。
【先行技術文献】
【非特許文献】
【0005】
【非特許文献1】N.Yorino, M.Nishimoto, T.Shudo, H.Sasaki, H.Sugihara, Y.Nakanishi, "An Optimal Control Problem for TCUL Transformers And Its Suboptimal Control Law for Autonomous Distributed Systems", The Papers of Technical Meeting on Power Engineering, IEE Japan, PE-10-164, PSE-10-163 (1998)
【発明の概要】
【発明が解決しようとする課題】
【0006】
近年、地球環境問題を背景に自然エネルギーを利用した太陽光発電や風力発電、電気と熱を併給するコージェネレーション、水素エネルギーを利用した燃料電池などに代表される分散電源の大量導入が予想されている。これら分散電源は電力系統ネットワークの下流に連系されるが、従来系統では、分散電源の大量導入を前提にしていないため、さまざまな問題が指摘されている。例えば、下位母線からの電力供給に対応する保護方式の問題、機器の設置や制御の問題、特に太陽光発電など出力変化が著しい分散電源が多数設置されたときの電力系統の電圧制御が問題となっている。このように、電力系統に分散電源などが大量導入された場合、電圧を制御すべき地点も大幅に増加し得ることから、電圧制御機器N台を用いてそれよりも多い任意のX箇所の電圧を制御する最適制御問題(以下、多点電圧制御問題と称する。)を考える必要がある。
【0007】
非特許文献1では、電圧制御機器の制御問題をダイナミックシステムの制御問題として定式化しているが、システムの可制御性を保証するために、電圧制御機器1台に対して制御対象電圧が1箇所であることを前提としている。したがって、非特許文献1に開示された制御手法を多点電圧制御問題にそのまま適用することは困難である。
【0008】
上記問題に鑑み、本発明は、電力系統に配置された複数の電圧制御機器を用いてそれよりも多い制御対象地点の電圧を制御するシステムおよび方法を提供することを目的とする。
【課題を解決するための手段】
【0009】
本発明の一局面に従うと、複数の電圧制御機器が配置された電力系統の電圧を制御するシステムは、前記複数の電圧制御機器の数よりも多い制御対象地点の電圧値が読み書きされる黒板手段と、前記黒板手段が保持する前記制御対象地点の電圧値に基づいて前記複数の電圧制御機器のそれぞれに係る指標sを計算し、当該計算した指標sに基づいて、前記複数の電圧制御機器のうち制御量を変更すべき電圧制御機器を選択する計算手段と、前記複数の電圧制御機器のそれぞれに対応して設けられ、前記選択された電圧制御機器に対して、前記制御対象地点の電圧値を引数とする目的関数の値が減少するように制御量を変更する指示をする複数の個別制御装置とを備えている。ここで、前記指標sが、前記制御対象地点の電圧変化量に対する前記目的関数の変化量と、前記電圧制御機器の制御量に対する前記制御対象地点の電圧変化量と、前記電圧制御機器が1回の動作で前記目的関数に与える影響度とに基づいて算出される。
【0010】
前記計算手段は、前記複数の電圧制御機器のうち指標sの絶対値が閾値よりも大きくかつ最大であるいずれか一つの電圧制御機器を選択してもよい。あるいは、前記計算手段は、前記複数の個別制御装置のそれぞれに分散して設けられた複数の計算部であり、前記計算部は、対応する前記電圧制御機器に係る指標sを計算するものであり、前記個別制御装置は、対応する前記電圧制御機器に係る指標sの絶対値が閾値よりも大きい場合、当該電圧制御機器に対して制御量を変更する指示をするものであってもよい。
【0011】
前記計算部は、所定期間、対応する前記電圧制御機器に係る指標sの計算を繰り返し、そのいずれもが前記閾値よりも大きい場合、当該電圧制御機器に対して制御量を変更する指示をしてもよい。さらに、前記指標sが、移動平均値であってもよい。
【0012】
また、前記黒板手段は、前記制御対象地点の各電圧値の信憑性を示すフラグを含み、前記計算手段は、前記黒板手段が保持する前記制御対象地点の電圧値のうち前記フラグによって信憑性が示されている電圧値を、前記複数の電圧制御機器のそれぞれに係る指標sの計算に用いるものであってもよい。
【発明の効果】
【0013】
本発明によると、電力系統に配置された複数の電圧制御機器を用いてそれよりも多い制御対象地点の電圧を制御することができる。
【図面の簡単な説明】
【0014】
【図1】本発明の一実施形態に係る電力系統電圧制御システムの概要図
【図2】変形例に係る電力系統電圧制御システムの概要図
【図3】行列Aの計算簡略化の説明に係る電力系統の模式図
【図4】インピーダンス比例配分法による行列Aの計算の説明に係る電力系統の模式図
【図5】本発明の一実施形態に係る電力系統電圧制御システムの動作フローチャート
【図6】黒板手段の保持情報の一例を示す模式図
【発明を実施するための形態】
【0015】
以下、図面を参照しながら本発明を実施するための形態について説明する。なお、本発明は、以下の実施形態に限定されるものではない。
【0016】
1 システムの概要
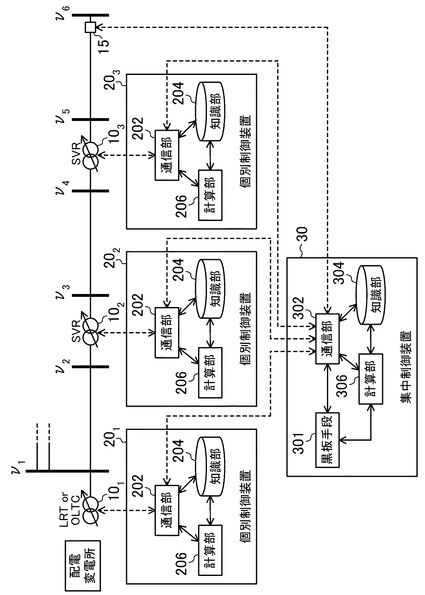
図1は、本発明の一実施形態に係る電力系統電圧制御システムの概要を示す。説明の便宜上、電力系統は6母線(ν1〜ν6)3タップ系統とし、また、3つのタップ機器は、配電変電所のLRTあるいはOLTC(On-Load Tap-Changing Transformer:負荷時タップ切替式変圧器)(電圧制御機器101)と、配電線の途中に配置された2つのSVR(電圧制御機器102,103)とする。なお、図示していないが、太陽光発電、風力発電などの分散電源、蓄電池などの電力貯蔵装置、および調相設備などが、任意の母線に任意の個数接続されていてもよい。
【0017】
本実施形態に係るシステムは、3つの電圧制御機器101〜103を用いて6箇所の制御対象地点の電圧ν1〜ν6を制御する。本システムは、電圧制御機器101〜103をそれぞれ制御する個別制御装置201〜203と、個別制御装置201〜203を集中制御する集中制御装置30を備えている。なお、以下において、電圧制御機器101〜103および個別制御装置201〜203について特に個別のものを指し示す必要がなければ符号の添字を省略して参照することがある。
【0018】
本システムの制御方式として、集中制御装置30が各電圧制御機器10に対して直接動作指示をし、各個別制御装置20はその指示を中継する集中制御方式と、各個別制御装置20が各電圧制御機器10に対して動作指示をし、集中制御装置30は各個別制御装置20の情報共有装置として機能する自律分散制御方式とがある。
【0019】
特に、自律分散制御方式では、各個別制御装置20は、自身の環境の状態を知覚し、自身の意思決定によって行動を起こして環境に影響を与えることのできる自律的主体であるエージェントとして機能する。自律分散制御方式で動作する本システムは、エージェントとしての個別制御装置20が複数集まって構成されたマルチエージェントシステムとして見ることができる。
【0020】
2 システムの詳細構成
次に、本システムの詳細構成について説明する。各個別制御装置20は、通信部202、知識部204、および計算部206を備えている。集中制御装置30は、黒板手段301、通信部302、知識部304、および計算部306を備えている。
【0021】
各個別制御装置20の通信部202は、対応する電圧制御機器10と通信することができる。各個別制御装置20は、通信部202を介して、対応する電圧制御機器10の一次母線および二次母線の各電圧値や変圧比などを取得したり、対応する電圧制御機器10に対して制御量を変更する指示をしたりする。
【0022】
また、各個別制御装置20の通信部202は、集中制御装置30の通信部302と通信することができる。各個別制御装置20は、これら通信部を介して、集中制御装置30との間で各種情報のやり取りをする。例えば、各個別制御装置20は、これら通信部を介して、対応する電圧制御機器10から取得した電圧値や変圧比などを黒板手段301に書き込み、必要に応じて、他の個別制御装置20が書き込んだ電圧値などを黒板手段301から読み出す。
【0023】
集中制御装置30の通信部302は、電圧制御機器10に直接接続されていない母線の電圧ν6を測定する電圧計測機器15と通信して、その電圧値を取得することができる。本実施形態では電圧計測機器15が1個しか配置されていないが、本システムの制御対象地点の電圧を測定するためにさらに多くの電圧制御機器15を電力系統中に配置してもよい。また、分散電源などが連系される場合には、電圧計測機器15に代えて分散電源と通信して電圧値を取得するようにしてもよい。
【0024】
なお、通信部202と電圧制御機器10との間の通信、通信部302と電圧計測機器15との間の通信、および通信部202と通信部302との間の通信は、メタル回線通信、光回線通信、PLC(Power Line Communication:電力線通信)、無線通信などのいずれであってもよい。通信プロトコルについても特に制限はなく任意である。
【0025】
各個別制御装置20の知識部204は、通信部202が取得した各種情報や計算部206の計算結果などを記憶する。知識部204は、各種メモリ装置、ハードディスク装置などで実現可能である。
【0026】
各個別制御装置20の計算部206は、通信部202が取得した各種情報および知識部204に保持された各種情報を用いて、対応する電圧制御機器10に係る指標sを計算する。計算部206は、マイコンなどで実現可能である。なお、指標sの詳細については後述する。
【0027】
自律分散制御方式の場合、各個別制御装置20は、計算部206が計算した指標sに基づいて、通信部202を介して、対応する電圧制御機器10に対して制御量を変更する指示をする。具体的には、各個別制御装置20は、指標sと正値の閾値αとを比較し、s>αならば電圧制御機器10に対してタップ値を下げる指示をし、s<−αならば電圧制御機器10に対してタップ値を上げる指示をする。
【0028】
電力系統の電圧を最適制御するには1時刻に高々1つの電圧制御機器10が動作すればよいが、自律分散制御方式では、指標sが所定の条件を満たせば複数の電圧制御機器10が一斉に動作することがある。このような無駄動作を抑制するために、電圧制御機器10への動作指示に時限を設けてもよい。具体的には、各個別制御装置20は、計算部206が計算した指標sが条件を満たしても、対応する電圧制御機器10に対して直ちに動作指示は出さずに、タイマーをスタートさせて、所定期間、指標sの計算を繰り返す。そして、タイマー値が閾値を超えてもなお指標sが条件を満たすようであれば、ようやくそのとき、対応する電圧制御機器10に対して動作指示を出す。なお、タイマーの計時中に指標sが条件を満たさなくなれば、タイマーをリセットする。
【0029】
このように、電圧制御機器10への動作指示に時限を設けることで電圧制御機器10の無駄動作が減少する。特に、出力変動が激しい分散電源などが電力系統に連系された場合に有効である。例えば、分散電源の出力が瞬間的に変動して制御対象地点の電圧が許容値を逸脱したとしても、分散電源の出力が直ちに元に戻るようであれば、電圧制御機器10を無駄に動作させなくて済む。
【0030】
集中制御装置30の黒板手段301は、上述したように各個別制御装置20から電圧値などの情報が読み書きされる共有メモリであり、マルチエージェントシステムにおける黒板モデルに該当する。情報の読み書きは、各個別制御装置20が任意のタイミングで行ってもよいし(非同期式)、各個別制御装置20が同期したタイミングで行ってもよい(同期式)。黒板手段301は、各種メモリ装置、ハードディスク装置などで実現可能である。
【0031】
集中制御装置30の知識部304は、通信部302が取得した各種情報や計算部306の計算結果などを記憶する。知識部304は、各種メモリ装置、ハードディスク装置などで実現可能である。
【0032】
また、知識部304は、全体の系統構成に関する情報を保持する。集中制御装置30は、個別制御装置20や図示しない区分開閉器などからの情報を元に全体の系統構成を監視しており、例えば、電力系統に分散電源などが追加あるいは離脱されたこと、あるいは線路が切り替えられたことなどによる何らかの系統構成変化を検出すると、知識部304に保持された系統構成情報を更新する。更新された系統構成情報は、黒板手段301を介して、あるいは知識部304から読み出されて、各個別制御装置20に伝達される。
【0033】
集中制御装置30の計算部306は、黒板手段301に保持された各種情報や知識部304に保持された各種情報を用いて各電圧制御機器10に係る指標sを計算する。計算部306は、マイコンなどで実現可能である。
【0034】
集中制御方式の場合、集中制御装置30は、計算部306が計算した指標sに基づいて、通信部302および個別制御装置20の通信部202を介して、いずれか一つの電圧制御機器10に対して制御量を変更する指示をする。具体的には、集中制御装置30は、指標sの絶対値が閾値よりも大きくかつ最大である電圧制御機器10に対して、指標sが正値ならばタップ値を下げる指示をし、指標sが負値ならばタップ値を上げる指示をする。
【0035】
一方、自律分散制御方式の場合、計算部306の計算結果は、電圧制御機器10の制御に用いずに、各個別制御装置20において計算された指標sの計算チェックや、通信機能喪失時のバックアップのため、さらには後に行う動作の解析・評価のために知識部304に保存されるのみである。
【0036】
なお、集中制御方式および自律分散制御方式のいずれにおいても、指標sをそのまま使用するのではなく移動平均値を使用するようにしてもよい。計算部206および計算部306が計算した指標sを適切に重み付けしつつ移動平均を取ることで、制御対象地点の突発的な電圧変動に過敏に反応することを避けつつ傾向を掴むことができる。この結果、電圧制御機器10の無駄動作を抑制することができる。
【0037】
また、黒板手段301に制御対象地点の各電圧値の信憑性を示すフラグ(信憑性フラグ)を導入してもよい。指標sの計算には各制御対象地点の最新かつ正確な電圧値が必要であるところ、個別制御装置20と集中制御装置30との間の通信が途絶えた場合など、黒板手段301において一部の電圧値が更新されなくなり、指標sが正しく計算できなくなるおそれがある。これは、各個別制御装置20が黒板手段301に対して非同期に情報を読み書きして自律的に指標sを計算する場合に特に問題である。そこで、黒板手段301に保持された各種情報が最新の系統状態を正確に反映したものであるかどうかを信憑性フラグで表すようにする。
【0038】
例えば、信憑性フラグが“1”だとその情報は更新済み(最新)であり、信憑性フラグが“0”だとそうではないことを意味し、デフォルトは“0”とする。各個別制御装置20は、取得した電圧値を黒板手段301に書き込む際、その電圧値が最新であることを示すため、信憑性フラグを“1”に設定する。他の個別制御装置20および集中制御装置30がその電圧値を読み取る際、信憑性フラグが“1”であれば、その電圧値は現在の最新の系統状態を反映したものであり、信頼できると判断することができ、計算部206および計算部306は、その電圧値を用いて指標sを計算する。一方、信憑性フラグが“0”であれば、その電圧値は最新でない可能性がある。この場合、計算部206および計算部306は、1)指標sを計算しない、2)電圧値を推定して指標sを計算する、3)その電圧値の重み付けを小さくして指標sを計算する、などのさまざまな対応を取ることができる。
【0039】
なお、信憑性フラグは、系統接続状態が変更された場合(例えば、系統切替後など)や系統接続自体が変わった場合(例えば、ある電圧制御機器10が動作した後など)には、すべて“0”にリセットされる。そして、黒板手段301に最新の電圧値が書き込まれるたびに信憑性フラグは“1”に更新されていく。
【0040】
3 変形例
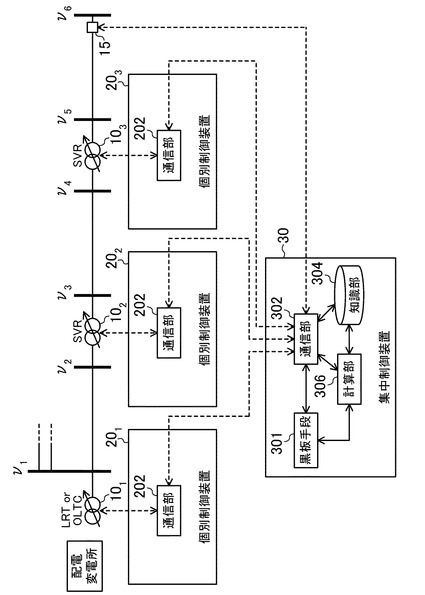
各個別制御装置20の知識部204および計算部206を省略して、集中制御装置30の知識部304および計算部306に機能を集約してもよい。図2は、変形例に係る電力系統電圧制御システムの概要を示す。変形例において、各個別制御装置20は通信部202を有し、集中制御装置30と各電圧制御機器10との間の通信を中継するのみである。特に、集中制御方式に特化する場合には当該変形例が有利である。
【0041】
4 指標sについて
4.1 多点電圧制御問題の定式化
次に、本システムで使用する指標sについて説明する。指標sは、多点電圧制御問題を最適化問題として定式化することで導出される。
【0042】
まず、本システムの目的関数と制約条件は次の通りである。なお、制約条件における記号Rは実数体を表す。
【0043】
目的関数
電圧偏差:minn V(ν) (1)
【0044】
制約条件
潮流方程式より決まる配送電特性方程式:ν=h(L,n) (2)
ただし、
V:RX→R1:スカラー目的関数(任意に設定)
ν=[ν1,…,νX]T∈RX:制御対象地点の電圧値ベクトル(X次元)
n=[n1,…,nN]T∈RN:タップ値ベクトル(N次元)
L=[L1,…,LY]T∈RY:負荷等の変動パラメータベクトル(Y次元)
h:RY*N→RX:送配電電圧特性関数
【0045】
ここで、k=1,…,Nとして、nkは第k番目の電圧制御機器10のタップ値であり、次式の形で順次制御していくものと仮定する。すなわち、電圧制御機器10としては、離散特性を模擬した以下のモデルを用いる。
【0046】
nk(τ+1)=nk(τ) + Δnk(τ)
Δnk(τ)=rk・fk(τ):時刻τにおけるタップ値変化
fk(τ)=1(タップ1段上げ動作) or 0(不動作) or −1(タップ1段下げ動作) (3)
【0047】
上記を次式としてベクトル表現する。
【0048】
n(τ+1)=n(τ) + Δn(τ) (4)
ただし、
Δn(τ)=R・f(τ)
R=diag[r1,…,rN]
f(τ)=[f1(τ),…,fN(τ)]T:時刻τにおけるタップ制御
【0049】
行列Rは、電圧制御機器10が1回の動作で目的関数に与える影響度を表す行列であり、具体的には、タップ1段の変化幅を表す行列である。
【0050】
いま、(3),(4)式に従ってタップを動作させるものと仮定し、この動作の結果、(1),(2)式の最適解n*に到達させる。
【0051】
いま、負荷パラメータLが定数であると仮定すると、目的関数の値は以下のように変化する。
【0052】
V(ν(τ+1))=V(ν(τ)) + ΔV(τ)
ΔV(τ)=∂V/∂ν・∂h/∂n・Δn(τ) (5)
【0053】
ここで、ΔV(τ)はタップ動作による目的関数の減少量である。したがって、1時刻に1つの電圧制御機器10のみを動作させる場合を考えると、目的関数を最も大きく減少させる電圧制御機器10を選定して制御する手法が最も効果的である。これは、(5)式のΔV(τ)値を各電圧制御機器10について調べることで達成できる。すなわち、(5)式は次式のように書ける。
【0054】
ΔV(τ)=w(τ)・A(τ)・R・f(τ)
=s(τ)・f(τ)
=[s1(τ) … sN(τ)][f1(τ) … fN(τ)]T
=Σi=1Nsi(τ)fi(τ)
ただし、
s(τ)=w(τ)・A(τ)・R
w=[∂V/∂ν]
A=[∂h/∂n]=[∂ν/∂n]
【0055】
行列wは、制御対象地点の電圧変化量に対する目的関数の変化量を表す行列である。また、行列Aは、電圧制御機器10の制御量に対する制御対象地点の電圧変化量を表す行列であり、具体的には、電圧/タップ感度行列である。
【0056】
上記から、第i番目の電圧制御機器10に係る指標sは次式で表される。
【0057】
si=[∂V/∂ν1 … ∂V/∂νX][∂ν1/∂ni … ∂νX/∂ni]Tri (6)
【0058】
すなわち、指標siは、任意に設定する目的関数V(ν)に対して第i番目の電圧制御機器10を動作させた場合の目的関数の変化を表している。
【0059】
なお、電圧制御機器10のタップ切り替えが1段ずつ行われることを前提とした場合、riはタップ1段当たりの変化幅を表すが、一度に2段以上のタップ切り替えが行われることもあるかもしれない。そのような場合にはriを適宜変更すればよい。
【0060】
(目的関数の例1)
目的関数V(ν)は、例えば次式のように定義することができる。
【0061】
V(ν)=1/2・(ν−νR)T・M・(ν−νR)
=1/2・Σi=1Nmi(νi−νR,i)2
ただし、
νR=[νR,1,…,νR,X]T∈RX:制御対象地点の目標電圧値ベクトル(X次元)
M=diag[m1,…,mx]:制御対象地点の電圧の重み行列
【0062】
この場合、時刻τにおける指標sは次式のように表される。
【0063】
s(τ)=w(τ)・A(τ)・R
=(ν−νR)T・M・A(τ)・R
【0064】
この指標sは、非特許文献1に開示された、電圧制御機器1台に対して制御対象電圧を1箇所とした場合、すなわちX=Nとした場合の指標sと一致する。すなわち、本発明によって提案する制御手法は、目的関数の設定によっては従来の制御手法をそのまま包含することができる。
【0065】
(目的関数の例2)
次に、目的関数V(ν)の別例を説明する。いま、電圧制御機器10kが2点の地点電圧を制御対象とする場合を考え、その送り出し電圧をν1,k、担当区域の末端電圧をν2,kとする。例えば、電圧制御機器101の場合、電圧ν1が送り出し電圧ν1,1であり、電圧ν2が末端電圧ν2,1である。また、2点の地点電圧に対する電圧上下限範囲は同じとする。この2点の異なる電圧ν1,k,ν2,kを最適に制御することは、電圧上下限範囲が同じ場合、電圧上限値と電圧下限値の中央値に近づけるように制御することと等価である。ここで、電圧上限値をνUL、電圧下限値をνLLとすると、電圧中央値νCは次式で表される。
【0066】
νC=(νUL+νLL)/2
【0067】
そして、複数の地点電圧を中央値に近づける制御を行う場合には、より電圧上下限値に近い値を重視すべきである。そのため、複数の電圧値を制御に反映させる場合、各地点の電圧値に応じて重み付けを行うこととする。具体的には、より電圧上下限に近い電圧値ほど重み付けを大きくして制御への反映感度を上げる一方、電圧上下限に遠い電圧値の重み付けは小さくして制御への反映感度を下げるようにすればよい。
【0068】
ν1,k>ν2,kのとき、電圧値ν1,kの重みβ1,kおよび電圧値ν2,kの重みβ2,kを算出し、制御対象電圧νγ,kを以下のように算出する。なお、ν1,k<ν2,kのときはこれとは逆の操作を行う。
【0069】
β1,k=Δν2,k/(Δν1,k+Δν2,k)
β2,k=1−β1,k=Δν1,k/(Δν1,k+Δν2,k)
νγ,k=β1,k・ν1,k+β2,k・ν2,k (7)
ただし、
Δν1,k=νUL−ν1,k
Δν2,k=ν2,k−νLL
【0070】
(7)式で算出した加重平均電圧νγ,kを第k番目の電圧制御機器10の制御対象電圧として、目的関数V(ν)を以下のように定義する。
【0071】
V(ν)=1/2・(νγ−νC)T・M・(νγ−νC)
【0072】
この場合、時刻τにおける指標sは次式のように表される。
【0073】
s(τ)=w(τ)・A(τ)・R
=(νγ−νC)T・M・A(τ)・R
【0074】
4.2 行列Aの算出
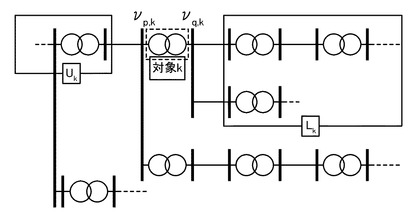
重み行列Mとタップ1段の変化幅riを既知とすると、指標sの計算に必要な情報は制御対象地点の電圧値νと行列Aである。行列Aは上述した系統構成情報に該当する。電圧値νについては黒板手段301を介して情報を得ることができるが、行列Aの算出には多くの系統情報と複雑な計算が必要となる。そこで、次のようにして行列Aの算出を簡略化してもよい。この算出方法は、ある電圧制御機器10が動作した場合、その影響が系統上位から下位へと伝わるが、並列の他フィーダや、系列下位から上位へと伝わることは少ないという性質を利用したものである。具体的には、集中制御装置30は、系統内で最上位の母線を1つ指定し、その母線から各母線の繋がりを放射状に認識する。そして、母線の階層情報に基づいて行列Aを算出する。
【0075】
例えば、図3に示したような電力系統において、第k番目の電圧制御機器10の一次母線電圧および二次母線電圧をνp,kおよびνq,k、系統上位の集合をUk、系統下位の集合をLkとする。この場合、行列Aの要素は次のように決まる。
【0076】
∂νi/∂nk≒∂νp,k/∂nk=0 (iがUkに属する場合)
∂νi/∂nk≒∂νq,k/∂nk=1 (iがLkに属する場合)
∂νi/∂nk=0 (iがUk、Lkのいずれにも属さない場合)
【0077】
系統内に、自動電圧制御装置(AVR)の機能を有する分散電源などが連系されている場合、その分散電源は電圧値を一定に保とうとする。そこで、下記のインピーダンス比例配分法によって系統下位の集合Lkに係る要素を修正してもよい。例えば、図4に示したように電力系統にAVR機能を有する分散電源(DG)が連系されているとすると、次式の概念を系統下位の集合Lkに与えるとよい。なお、Ziは各母線間のインピーダンスである。
【0078】
∂νn/∂nn=Σi=1kZi/Σi=1NZi×Σi=1nZi/Σi=1kZi
=Σi=1nZi/Σi=1NZi
ただし、タップの向きが逆転する場合は次式を用いる。
∂νn/∂nn=−Σi=1kZi/Σi=1NZi×Σi=1nZi/Σi=1kZi
=−Σi=1nZi/Σi=1NZi
【0079】
4.3 ローカルな目的関数の変化量
いま、(1)式の目的関数が上記例1および例2のように系統各所のローカルな目的関数の合計値で表されている場合を想定する。通常は、このような目的関数の構成が現実的である。すなわち、
【0080】
V(ν)=Σz=1ZVz(ν)
【0081】
ただし、Zはローカルな目的関数の総数を、Vz(ν)は第z番目のローカルな目的関数を表す。このとき、電圧制御機器10の制御量変化に対して目的関数のΔV(ν)は次のように書ける。
【0082】
ΔV(ν)=Σz=1ZΔVz(ν) (8)
【0083】
さらに、上記のローカルな目的関数の変化は以下のように算出できる。
【0084】
ΔVz(τ)=wz(τ)・A(τ)・Δn(τ)
=Σi=1Nszi(τ)fi(τ)
ただし、
sz(τ)=wz(ν)・A(τ)・R
wz=[wz1 … wzX]=[∂Vz/∂ν]
【0085】
szk(τ)は、任意に設定するローカルな目的関数Vz(ν)に対し、第k番目の電圧制御機器10を動作させた場合の目的関数の変化を表している。なお、sz(τ)は次式のように指標sの構成要素である。
【0086】
s(τ)=Σz=1Zsz(τ)
【0087】
4.4 指標sの別例
上記説明は、電圧制御機器10がSVRやLRTなどのタップ切替式変圧器であることを前提としているが、本発明はこれに限定されない。電圧制御機器10は、ShC(Shunt Capacitor:分路コンデンサ)やShR(Shunt Reactor:分路リアクトル)などのタップ切替式並列無効電力供給機器や、SVC(Static Var Compensator:静止型無効電力補償装置)などのFACTS(Flexible AC Tansmission System)機器であってもよい。特に、FACTS機器は1秒以内の高速な制御が可能であり、上記のタップ機器とは異なり、制御量は連続的である。
【0088】
電圧制御機器10がShC、ShR、SVCなどの無効電力供給機器である場合、定式化には(5)式ではなく次式を用いる。Qは無効電力注入量である。
【0089】
ΔV(τ)=∂V/∂ν・∂h/∂Q・ΔQ(τ)
=w(τ)・A(τ)・R・f(τ)
=s(τ)・f(τ)
=[s1(τ) … sN(τ)][f1(τ) … fN(τ)]T
=Σi=1Nsi(τ)fi(τ)
ただし、
s(τ)=w(τ)・A(τ)・R
w=[∂V/∂ν]
A=[∂h/∂Q]=[∂ν/∂Q]
【0090】
行列wは、制御対象地点の電圧変化量に対する目的関数の変化量を表す行列である。また、行列Aは、電圧制御機器10の制御量に対する制御対象地点の電圧変化量を表す行列である。
【0091】
このように、電圧制御機器10の制御変数に応じて行例Aは変わり得る。なお、制御変数が無効電力注入量Qである場合、第i番目の電圧制御機器10に係る指標sは次式で表される。
【0092】
si=[∂V/∂ν1 … ∂V/∂νX][∂ν1/∂Qi … ∂νX/∂Qi]Tri
【0093】
4.5 本定式化の利点および特徴
本定式化の利点および特徴は以下のようにまとめられる。
【0094】
1)従来手法は、タップ機器の制御問題をダイナミックシステムの制御の問題として定式化したため、システムの安定性を常に念頭に置く必要があった。これは、自動制御システムとしての機能を重視していたためである。しかし、本定式化は目的関数の改善だけに着目し、制約付き非線形計画法として定式化したことで、ダイナミックシステム制御の観点を無視している。このため、制御対象地点の各電圧値から算出される目的関数以外の挙動については考慮しておらず、制御を実施する際に特定箇所の電圧などが問題となる場合には目的関数に加えるなどの対応が別途必要になる。しかし、これは電圧制御機器や制御対象地点の最適配置の問題であり、制御系の設計においては、どのような場合も必要となる共通的な検討事項である。
【0095】
2)ダイナミックシステムとしての議論をしないため、システムの可制御性の議論も不要である。本定式化では可制御でない観測点やローカルな目的関数が混在しても無視されるのみである。この性質は完全に独立した自動制御システムとして構築する場合には大きな問題となるが、黒板方式で全体情報を監視しながら制御を行う場合には問題とならない。
【0096】
3)従来手法では、独立した自動制御システムを構築するために平衡状態の議論が不可欠であった。平衡状態は、目的関数の設定時に矛盾が生じないように適切に確保しておかないと有害なハンチングなどの振動現象を誘発する。一方、本定式化では目的関数の設定のみが必要である。
【0097】
4)従来手法では、上記の例1に係る目的関数を設定した。これは、ダイナミックシステムの安定性を保証するリアプノフ関数としての性格を持つため、設定する目的関数にはリアプノフ関数として使うための制約があったためである。一方、本定式化では、このような制約が一切ないため、目的関数を任意に設定できる点が有利である。
【0098】
5)非線形計画問題の最適化を求める問題として定式化しているので、制御対象地点や電圧制御機器の数などに関して格段に自由度がある。
【0099】
6)目的関数の設定に自由度があるため、任意の設定に関して(8)式の形で電圧制御機器10の制御量に対する目的関数の詳細変化を予想できる。これは、黒板形式の制御法と組み合わせた場合、制御性能を高める上で大きな利点となる。
【0100】
5 個別制御装置20の動作例
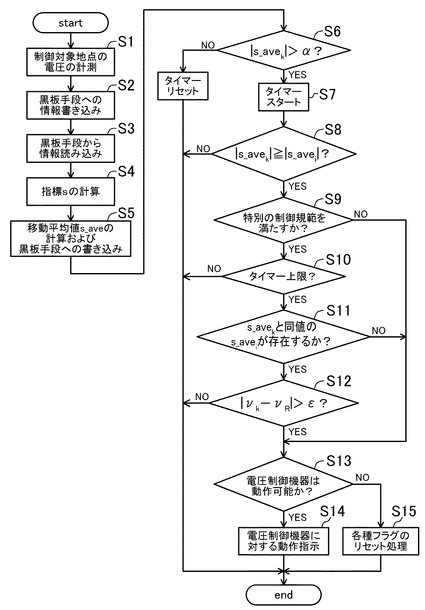
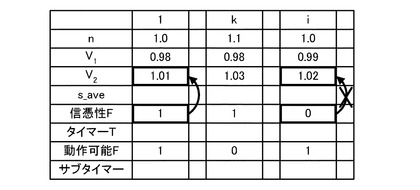
次に、本システムが自律分散制御方式で動作する場合における個別制御装置20の動作例について図5のフローチャートを参照しながら説明する。図6は、黒板手段301が保持する各種情報の一例を模式的に表として表したものである。なお、表中の各列は各個別制御装置20が書き込んだ情報であり、V1、V2は各電圧制御機器10の一次母線電圧値[p.u.]および二次母線電圧値[p.u.]を表す。
【0101】
ステップ1:対応する電圧制御機器10の一次母線電圧値および二次母線電圧値の計測する。なお、適宜、計測値のフィルタリングを行ってもよい。
【0102】
ステップ2:計測した電圧値およびタップ比などを黒板手段301に書き込む。このとき、対応する電圧制御機器10の信憑性フラグを“1”に更新する。
【0103】
ステップ3:黒板手段301から、信憑性フラグが“1”である他の電圧制御機器10の情報を読み込み、知識部204に保存する。なお、信憑性フラグが“0”である他の電圧制御機器10の情報については、1)読み込まない、2)推定する、3)重み付けを小さくする、などの処置をする。
【0104】
ステップ4:指標sを計算する。例えば、上記の目的関数の例2の場合には加重平均電圧νγを計算する。
【0105】
ステップ5:指標sの移動平均値s_aveを計算し、黒板手段301に書き込む。例えば、第k番目の電圧制御機器10に係る移動平均値は次式で表される。ただし、aは指標sのサンプル個数、miは各サンプルの重みである。
【0106】
s_avek=Σb=0a-1mb(sk,t-b/a)
【0107】
ステップ6:移動平均値の絶対値|s_avek|と閾値αとを比較する。もし、|s_avek|<αなら、タイマーをリセットし、黒板手段301にタイマーリセットの情報を書き込んで終了する。
【0108】
ステップ7:|s_avek|>αなら、タイマーが停止している場合はタイマーをスタートさせ、黒板手段301にタイマースタートの情報を書き込む。タイマーがすでにスタートしていたならタイマーを継続させる。
【0109】
ステップ8:黒板手段301を参照して、自身の移動平均値が最大かどうか、すなわち、タイマーがスタートしている他のどの電圧制御機器10の移動平均値よりも大きいかどうかを確認する。
【0110】
ステップ9:|s_avek|が最大なら、特別の制御規範を満たすか否かを判定する。例えば、移動平均値や電圧違反の積分値が相当程度大きい場合、タイマーが上限に達しなくても、対応する電圧制御機器10に対して動作指示をする。なお、このステップの実行は任意であり、省略してもよい。
【0111】
ステップ10:タイマーが上限に達したかどうかを判定する。もし、タイマーがまだ上限に達していなければ終了する。
【0112】
ステップ11:自身の移動平均値と同じ値の移動平均値が他に存在するかどうかを判定する。もし、存在しなければ、対応する電圧制御機器10が動作可能かどうかの判定に進む。
【0113】
ステップ12:もし、自身の移動平均値と同じ値の移動平均値が他にも存在すれば、電圧偏差|νk−νR|が不感帯εよりも大きいかどうかを判定する。もし、大きければ、対応する電圧制御機器10が動作可能かどうかの判定に進み、小さければ終了する。
【0114】
ステップ13:対応する電圧制御機器10が動作可能であるかどうかを判定する。もし、電圧制御機器10のタップ値が上限値あるいは下限値に達している場合、さらにタップ値を上げるあるいは下げるという動作は不可能である。
【0115】
ステップ14:対応する電圧制御機器10が動作可能であれば、当該電圧制御機器10に動作指示を出す。そして、黒板手段301において自身に関する各種フラグ(例えば、動作可能フラグなど)をリセットして終了する。
【0116】
ステップ15:対応する電圧制御機器10が動作不可能であれば、黒板手段301において自身に関する各種フラグをリセットして終了する。なお、サブタイマーをスタートさせて、動作不可能な状態が一定期間以上継続するようであれば、他の電圧制御機器10に動作指示を出すようにしてもよい。
【産業上の利用可能性】
【0117】
本発明に係る電力系統電圧制御システムおよび方法は、電力系統に配置された複数の電圧制御機器を用いてそれよりも多い制御対象地点の電圧を制御することができるため、配電系統や船舶内系統の電圧制御に有用である。
【符号の説明】
【0118】
10 電圧制御機器
20 個別制御装置
206 計算部(計算手段)
306 計算部(計算手段)
301 黒板手段
【技術分野】
【0001】
本発明は、電力系統における任意の地点の電圧を制御するシステムおよび方法に関する。
【背景技術】
【0002】
各需要家に送られる電力には許容電圧値が定められおり、例えば、日本では低圧側で101±6(95〜107)Vである。よって、電気事業者は各需要家の受電設備に供給される電圧がこの範囲に収まるように電力系統の電圧を制御する必要がある。
【0003】
一般に、電力系統の電圧は送り出し変電所(配電用変電所)から末端に向けて、すなわち、上流から下流に向けて低下する。従来、変電所からの送り出し電圧をLRT(Load Ratio control Transformer:負荷時タップ切替装置付変圧器)などで適切に制御し、かつ柱上変圧器(高圧/低圧)にてタップを変更し、さらに電圧低下が著しい場合にはSVR(Step Voltage Regulator:自動電圧調整器)において電圧を持ち上げるという制御が行われている。SVRは、配電線(フィーダ)に直列に挿入されるタップ切替式の変圧器であり、一次側と二次側の巻線比(変圧比)を変更することで電圧を制御する。通常、SVRは配電線の途中に設置され、自動タップ切替により変圧比を調整することで配電線電圧を規定値以内に維持する。
【0004】
従来の電力系統電圧制御では、LRTおよびSVRなどの電圧制御機器が各地点で個別に動作するため、これら電圧制御機器が直列に複数設置されていると制御が干渉し合って無駄なタップ動作(ハンチング)や逆動作を起こしてしまうことがある。この問題に対して、各電圧制御機器によって制御される電圧の目標電圧からの逸脱量などから算出されるある指標に基づいて各電圧制御機器を集中制御あるいは分散制御することで、電力系統の電圧違反を最小化しつつタップ動作回数も最小化する手法が提案されている(例えば、非特許文献1参照)。
【先行技術文献】
【非特許文献】
【0005】
【非特許文献1】N.Yorino, M.Nishimoto, T.Shudo, H.Sasaki, H.Sugihara, Y.Nakanishi, "An Optimal Control Problem for TCUL Transformers And Its Suboptimal Control Law for Autonomous Distributed Systems", The Papers of Technical Meeting on Power Engineering, IEE Japan, PE-10-164, PSE-10-163 (1998)
【発明の概要】
【発明が解決しようとする課題】
【0006】
近年、地球環境問題を背景に自然エネルギーを利用した太陽光発電や風力発電、電気と熱を併給するコージェネレーション、水素エネルギーを利用した燃料電池などに代表される分散電源の大量導入が予想されている。これら分散電源は電力系統ネットワークの下流に連系されるが、従来系統では、分散電源の大量導入を前提にしていないため、さまざまな問題が指摘されている。例えば、下位母線からの電力供給に対応する保護方式の問題、機器の設置や制御の問題、特に太陽光発電など出力変化が著しい分散電源が多数設置されたときの電力系統の電圧制御が問題となっている。このように、電力系統に分散電源などが大量導入された場合、電圧を制御すべき地点も大幅に増加し得ることから、電圧制御機器N台を用いてそれよりも多い任意のX箇所の電圧を制御する最適制御問題(以下、多点電圧制御問題と称する。)を考える必要がある。
【0007】
非特許文献1では、電圧制御機器の制御問題をダイナミックシステムの制御問題として定式化しているが、システムの可制御性を保証するために、電圧制御機器1台に対して制御対象電圧が1箇所であることを前提としている。したがって、非特許文献1に開示された制御手法を多点電圧制御問題にそのまま適用することは困難である。
【0008】
上記問題に鑑み、本発明は、電力系統に配置された複数の電圧制御機器を用いてそれよりも多い制御対象地点の電圧を制御するシステムおよび方法を提供することを目的とする。
【課題を解決するための手段】
【0009】
本発明の一局面に従うと、複数の電圧制御機器が配置された電力系統の電圧を制御するシステムは、前記複数の電圧制御機器の数よりも多い制御対象地点の電圧値が読み書きされる黒板手段と、前記黒板手段が保持する前記制御対象地点の電圧値に基づいて前記複数の電圧制御機器のそれぞれに係る指標sを計算し、当該計算した指標sに基づいて、前記複数の電圧制御機器のうち制御量を変更すべき電圧制御機器を選択する計算手段と、前記複数の電圧制御機器のそれぞれに対応して設けられ、前記選択された電圧制御機器に対して、前記制御対象地点の電圧値を引数とする目的関数の値が減少するように制御量を変更する指示をする複数の個別制御装置とを備えている。ここで、前記指標sが、前記制御対象地点の電圧変化量に対する前記目的関数の変化量と、前記電圧制御機器の制御量に対する前記制御対象地点の電圧変化量と、前記電圧制御機器が1回の動作で前記目的関数に与える影響度とに基づいて算出される。
【0010】
前記計算手段は、前記複数の電圧制御機器のうち指標sの絶対値が閾値よりも大きくかつ最大であるいずれか一つの電圧制御機器を選択してもよい。あるいは、前記計算手段は、前記複数の個別制御装置のそれぞれに分散して設けられた複数の計算部であり、前記計算部は、対応する前記電圧制御機器に係る指標sを計算するものであり、前記個別制御装置は、対応する前記電圧制御機器に係る指標sの絶対値が閾値よりも大きい場合、当該電圧制御機器に対して制御量を変更する指示をするものであってもよい。
【0011】
前記計算部は、所定期間、対応する前記電圧制御機器に係る指標sの計算を繰り返し、そのいずれもが前記閾値よりも大きい場合、当該電圧制御機器に対して制御量を変更する指示をしてもよい。さらに、前記指標sが、移動平均値であってもよい。
【0012】
また、前記黒板手段は、前記制御対象地点の各電圧値の信憑性を示すフラグを含み、前記計算手段は、前記黒板手段が保持する前記制御対象地点の電圧値のうち前記フラグによって信憑性が示されている電圧値を、前記複数の電圧制御機器のそれぞれに係る指標sの計算に用いるものであってもよい。
【発明の効果】
【0013】
本発明によると、電力系統に配置された複数の電圧制御機器を用いてそれよりも多い制御対象地点の電圧を制御することができる。
【図面の簡単な説明】
【0014】
【図1】本発明の一実施形態に係る電力系統電圧制御システムの概要図
【図2】変形例に係る電力系統電圧制御システムの概要図
【図3】行列Aの計算簡略化の説明に係る電力系統の模式図
【図4】インピーダンス比例配分法による行列Aの計算の説明に係る電力系統の模式図
【図5】本発明の一実施形態に係る電力系統電圧制御システムの動作フローチャート
【図6】黒板手段の保持情報の一例を示す模式図
【発明を実施するための形態】
【0015】
以下、図面を参照しながら本発明を実施するための形態について説明する。なお、本発明は、以下の実施形態に限定されるものではない。
【0016】
1 システムの概要
図1は、本発明の一実施形態に係る電力系統電圧制御システムの概要を示す。説明の便宜上、電力系統は6母線(ν1〜ν6)3タップ系統とし、また、3つのタップ機器は、配電変電所のLRTあるいはOLTC(On-Load Tap-Changing Transformer:負荷時タップ切替式変圧器)(電圧制御機器101)と、配電線の途中に配置された2つのSVR(電圧制御機器102,103)とする。なお、図示していないが、太陽光発電、風力発電などの分散電源、蓄電池などの電力貯蔵装置、および調相設備などが、任意の母線に任意の個数接続されていてもよい。
【0017】
本実施形態に係るシステムは、3つの電圧制御機器101〜103を用いて6箇所の制御対象地点の電圧ν1〜ν6を制御する。本システムは、電圧制御機器101〜103をそれぞれ制御する個別制御装置201〜203と、個別制御装置201〜203を集中制御する集中制御装置30を備えている。なお、以下において、電圧制御機器101〜103および個別制御装置201〜203について特に個別のものを指し示す必要がなければ符号の添字を省略して参照することがある。
【0018】
本システムの制御方式として、集中制御装置30が各電圧制御機器10に対して直接動作指示をし、各個別制御装置20はその指示を中継する集中制御方式と、各個別制御装置20が各電圧制御機器10に対して動作指示をし、集中制御装置30は各個別制御装置20の情報共有装置として機能する自律分散制御方式とがある。
【0019】
特に、自律分散制御方式では、各個別制御装置20は、自身の環境の状態を知覚し、自身の意思決定によって行動を起こして環境に影響を与えることのできる自律的主体であるエージェントとして機能する。自律分散制御方式で動作する本システムは、エージェントとしての個別制御装置20が複数集まって構成されたマルチエージェントシステムとして見ることができる。
【0020】
2 システムの詳細構成
次に、本システムの詳細構成について説明する。各個別制御装置20は、通信部202、知識部204、および計算部206を備えている。集中制御装置30は、黒板手段301、通信部302、知識部304、および計算部306を備えている。
【0021】
各個別制御装置20の通信部202は、対応する電圧制御機器10と通信することができる。各個別制御装置20は、通信部202を介して、対応する電圧制御機器10の一次母線および二次母線の各電圧値や変圧比などを取得したり、対応する電圧制御機器10に対して制御量を変更する指示をしたりする。
【0022】
また、各個別制御装置20の通信部202は、集中制御装置30の通信部302と通信することができる。各個別制御装置20は、これら通信部を介して、集中制御装置30との間で各種情報のやり取りをする。例えば、各個別制御装置20は、これら通信部を介して、対応する電圧制御機器10から取得した電圧値や変圧比などを黒板手段301に書き込み、必要に応じて、他の個別制御装置20が書き込んだ電圧値などを黒板手段301から読み出す。
【0023】
集中制御装置30の通信部302は、電圧制御機器10に直接接続されていない母線の電圧ν6を測定する電圧計測機器15と通信して、その電圧値を取得することができる。本実施形態では電圧計測機器15が1個しか配置されていないが、本システムの制御対象地点の電圧を測定するためにさらに多くの電圧制御機器15を電力系統中に配置してもよい。また、分散電源などが連系される場合には、電圧計測機器15に代えて分散電源と通信して電圧値を取得するようにしてもよい。
【0024】
なお、通信部202と電圧制御機器10との間の通信、通信部302と電圧計測機器15との間の通信、および通信部202と通信部302との間の通信は、メタル回線通信、光回線通信、PLC(Power Line Communication:電力線通信)、無線通信などのいずれであってもよい。通信プロトコルについても特に制限はなく任意である。
【0025】
各個別制御装置20の知識部204は、通信部202が取得した各種情報や計算部206の計算結果などを記憶する。知識部204は、各種メモリ装置、ハードディスク装置などで実現可能である。
【0026】
各個別制御装置20の計算部206は、通信部202が取得した各種情報および知識部204に保持された各種情報を用いて、対応する電圧制御機器10に係る指標sを計算する。計算部206は、マイコンなどで実現可能である。なお、指標sの詳細については後述する。
【0027】
自律分散制御方式の場合、各個別制御装置20は、計算部206が計算した指標sに基づいて、通信部202を介して、対応する電圧制御機器10に対して制御量を変更する指示をする。具体的には、各個別制御装置20は、指標sと正値の閾値αとを比較し、s>αならば電圧制御機器10に対してタップ値を下げる指示をし、s<−αならば電圧制御機器10に対してタップ値を上げる指示をする。
【0028】
電力系統の電圧を最適制御するには1時刻に高々1つの電圧制御機器10が動作すればよいが、自律分散制御方式では、指標sが所定の条件を満たせば複数の電圧制御機器10が一斉に動作することがある。このような無駄動作を抑制するために、電圧制御機器10への動作指示に時限を設けてもよい。具体的には、各個別制御装置20は、計算部206が計算した指標sが条件を満たしても、対応する電圧制御機器10に対して直ちに動作指示は出さずに、タイマーをスタートさせて、所定期間、指標sの計算を繰り返す。そして、タイマー値が閾値を超えてもなお指標sが条件を満たすようであれば、ようやくそのとき、対応する電圧制御機器10に対して動作指示を出す。なお、タイマーの計時中に指標sが条件を満たさなくなれば、タイマーをリセットする。
【0029】
このように、電圧制御機器10への動作指示に時限を設けることで電圧制御機器10の無駄動作が減少する。特に、出力変動が激しい分散電源などが電力系統に連系された場合に有効である。例えば、分散電源の出力が瞬間的に変動して制御対象地点の電圧が許容値を逸脱したとしても、分散電源の出力が直ちに元に戻るようであれば、電圧制御機器10を無駄に動作させなくて済む。
【0030】
集中制御装置30の黒板手段301は、上述したように各個別制御装置20から電圧値などの情報が読み書きされる共有メモリであり、マルチエージェントシステムにおける黒板モデルに該当する。情報の読み書きは、各個別制御装置20が任意のタイミングで行ってもよいし(非同期式)、各個別制御装置20が同期したタイミングで行ってもよい(同期式)。黒板手段301は、各種メモリ装置、ハードディスク装置などで実現可能である。
【0031】
集中制御装置30の知識部304は、通信部302が取得した各種情報や計算部306の計算結果などを記憶する。知識部304は、各種メモリ装置、ハードディスク装置などで実現可能である。
【0032】
また、知識部304は、全体の系統構成に関する情報を保持する。集中制御装置30は、個別制御装置20や図示しない区分開閉器などからの情報を元に全体の系統構成を監視しており、例えば、電力系統に分散電源などが追加あるいは離脱されたこと、あるいは線路が切り替えられたことなどによる何らかの系統構成変化を検出すると、知識部304に保持された系統構成情報を更新する。更新された系統構成情報は、黒板手段301を介して、あるいは知識部304から読み出されて、各個別制御装置20に伝達される。
【0033】
集中制御装置30の計算部306は、黒板手段301に保持された各種情報や知識部304に保持された各種情報を用いて各電圧制御機器10に係る指標sを計算する。計算部306は、マイコンなどで実現可能である。
【0034】
集中制御方式の場合、集中制御装置30は、計算部306が計算した指標sに基づいて、通信部302および個別制御装置20の通信部202を介して、いずれか一つの電圧制御機器10に対して制御量を変更する指示をする。具体的には、集中制御装置30は、指標sの絶対値が閾値よりも大きくかつ最大である電圧制御機器10に対して、指標sが正値ならばタップ値を下げる指示をし、指標sが負値ならばタップ値を上げる指示をする。
【0035】
一方、自律分散制御方式の場合、計算部306の計算結果は、電圧制御機器10の制御に用いずに、各個別制御装置20において計算された指標sの計算チェックや、通信機能喪失時のバックアップのため、さらには後に行う動作の解析・評価のために知識部304に保存されるのみである。
【0036】
なお、集中制御方式および自律分散制御方式のいずれにおいても、指標sをそのまま使用するのではなく移動平均値を使用するようにしてもよい。計算部206および計算部306が計算した指標sを適切に重み付けしつつ移動平均を取ることで、制御対象地点の突発的な電圧変動に過敏に反応することを避けつつ傾向を掴むことができる。この結果、電圧制御機器10の無駄動作を抑制することができる。
【0037】
また、黒板手段301に制御対象地点の各電圧値の信憑性を示すフラグ(信憑性フラグ)を導入してもよい。指標sの計算には各制御対象地点の最新かつ正確な電圧値が必要であるところ、個別制御装置20と集中制御装置30との間の通信が途絶えた場合など、黒板手段301において一部の電圧値が更新されなくなり、指標sが正しく計算できなくなるおそれがある。これは、各個別制御装置20が黒板手段301に対して非同期に情報を読み書きして自律的に指標sを計算する場合に特に問題である。そこで、黒板手段301に保持された各種情報が最新の系統状態を正確に反映したものであるかどうかを信憑性フラグで表すようにする。
【0038】
例えば、信憑性フラグが“1”だとその情報は更新済み(最新)であり、信憑性フラグが“0”だとそうではないことを意味し、デフォルトは“0”とする。各個別制御装置20は、取得した電圧値を黒板手段301に書き込む際、その電圧値が最新であることを示すため、信憑性フラグを“1”に設定する。他の個別制御装置20および集中制御装置30がその電圧値を読み取る際、信憑性フラグが“1”であれば、その電圧値は現在の最新の系統状態を反映したものであり、信頼できると判断することができ、計算部206および計算部306は、その電圧値を用いて指標sを計算する。一方、信憑性フラグが“0”であれば、その電圧値は最新でない可能性がある。この場合、計算部206および計算部306は、1)指標sを計算しない、2)電圧値を推定して指標sを計算する、3)その電圧値の重み付けを小さくして指標sを計算する、などのさまざまな対応を取ることができる。
【0039】
なお、信憑性フラグは、系統接続状態が変更された場合(例えば、系統切替後など)や系統接続自体が変わった場合(例えば、ある電圧制御機器10が動作した後など)には、すべて“0”にリセットされる。そして、黒板手段301に最新の電圧値が書き込まれるたびに信憑性フラグは“1”に更新されていく。
【0040】
3 変形例
各個別制御装置20の知識部204および計算部206を省略して、集中制御装置30の知識部304および計算部306に機能を集約してもよい。図2は、変形例に係る電力系統電圧制御システムの概要を示す。変形例において、各個別制御装置20は通信部202を有し、集中制御装置30と各電圧制御機器10との間の通信を中継するのみである。特に、集中制御方式に特化する場合には当該変形例が有利である。
【0041】
4 指標sについて
4.1 多点電圧制御問題の定式化
次に、本システムで使用する指標sについて説明する。指標sは、多点電圧制御問題を最適化問題として定式化することで導出される。
【0042】
まず、本システムの目的関数と制約条件は次の通りである。なお、制約条件における記号Rは実数体を表す。
【0043】
目的関数
電圧偏差:minn V(ν) (1)
【0044】
制約条件
潮流方程式より決まる配送電特性方程式:ν=h(L,n) (2)
ただし、
V:RX→R1:スカラー目的関数(任意に設定)
ν=[ν1,…,νX]T∈RX:制御対象地点の電圧値ベクトル(X次元)
n=[n1,…,nN]T∈RN:タップ値ベクトル(N次元)
L=[L1,…,LY]T∈RY:負荷等の変動パラメータベクトル(Y次元)
h:RY*N→RX:送配電電圧特性関数
【0045】
ここで、k=1,…,Nとして、nkは第k番目の電圧制御機器10のタップ値であり、次式の形で順次制御していくものと仮定する。すなわち、電圧制御機器10としては、離散特性を模擬した以下のモデルを用いる。
【0046】
nk(τ+1)=nk(τ) + Δnk(τ)
Δnk(τ)=rk・fk(τ):時刻τにおけるタップ値変化
fk(τ)=1(タップ1段上げ動作) or 0(不動作) or −1(タップ1段下げ動作) (3)
【0047】
上記を次式としてベクトル表現する。
【0048】
n(τ+1)=n(τ) + Δn(τ) (4)
ただし、
Δn(τ)=R・f(τ)
R=diag[r1,…,rN]
f(τ)=[f1(τ),…,fN(τ)]T:時刻τにおけるタップ制御
【0049】
行列Rは、電圧制御機器10が1回の動作で目的関数に与える影響度を表す行列であり、具体的には、タップ1段の変化幅を表す行列である。
【0050】
いま、(3),(4)式に従ってタップを動作させるものと仮定し、この動作の結果、(1),(2)式の最適解n*に到達させる。
【0051】
いま、負荷パラメータLが定数であると仮定すると、目的関数の値は以下のように変化する。
【0052】
V(ν(τ+1))=V(ν(τ)) + ΔV(τ)
ΔV(τ)=∂V/∂ν・∂h/∂n・Δn(τ) (5)
【0053】
ここで、ΔV(τ)はタップ動作による目的関数の減少量である。したがって、1時刻に1つの電圧制御機器10のみを動作させる場合を考えると、目的関数を最も大きく減少させる電圧制御機器10を選定して制御する手法が最も効果的である。これは、(5)式のΔV(τ)値を各電圧制御機器10について調べることで達成できる。すなわち、(5)式は次式のように書ける。
【0054】
ΔV(τ)=w(τ)・A(τ)・R・f(τ)
=s(τ)・f(τ)
=[s1(τ) … sN(τ)][f1(τ) … fN(τ)]T
=Σi=1Nsi(τ)fi(τ)
ただし、
s(τ)=w(τ)・A(τ)・R
w=[∂V/∂ν]
A=[∂h/∂n]=[∂ν/∂n]
【0055】
行列wは、制御対象地点の電圧変化量に対する目的関数の変化量を表す行列である。また、行列Aは、電圧制御機器10の制御量に対する制御対象地点の電圧変化量を表す行列であり、具体的には、電圧/タップ感度行列である。
【0056】
上記から、第i番目の電圧制御機器10に係る指標sは次式で表される。
【0057】
si=[∂V/∂ν1 … ∂V/∂νX][∂ν1/∂ni … ∂νX/∂ni]Tri (6)
【0058】
すなわち、指標siは、任意に設定する目的関数V(ν)に対して第i番目の電圧制御機器10を動作させた場合の目的関数の変化を表している。
【0059】
なお、電圧制御機器10のタップ切り替えが1段ずつ行われることを前提とした場合、riはタップ1段当たりの変化幅を表すが、一度に2段以上のタップ切り替えが行われることもあるかもしれない。そのような場合にはriを適宜変更すればよい。
【0060】
(目的関数の例1)
目的関数V(ν)は、例えば次式のように定義することができる。
【0061】
V(ν)=1/2・(ν−νR)T・M・(ν−νR)
=1/2・Σi=1Nmi(νi−νR,i)2
ただし、
νR=[νR,1,…,νR,X]T∈RX:制御対象地点の目標電圧値ベクトル(X次元)
M=diag[m1,…,mx]:制御対象地点の電圧の重み行列
【0062】
この場合、時刻τにおける指標sは次式のように表される。
【0063】
s(τ)=w(τ)・A(τ)・R
=(ν−νR)T・M・A(τ)・R
【0064】
この指標sは、非特許文献1に開示された、電圧制御機器1台に対して制御対象電圧を1箇所とした場合、すなわちX=Nとした場合の指標sと一致する。すなわち、本発明によって提案する制御手法は、目的関数の設定によっては従来の制御手法をそのまま包含することができる。
【0065】
(目的関数の例2)
次に、目的関数V(ν)の別例を説明する。いま、電圧制御機器10kが2点の地点電圧を制御対象とする場合を考え、その送り出し電圧をν1,k、担当区域の末端電圧をν2,kとする。例えば、電圧制御機器101の場合、電圧ν1が送り出し電圧ν1,1であり、電圧ν2が末端電圧ν2,1である。また、2点の地点電圧に対する電圧上下限範囲は同じとする。この2点の異なる電圧ν1,k,ν2,kを最適に制御することは、電圧上下限範囲が同じ場合、電圧上限値と電圧下限値の中央値に近づけるように制御することと等価である。ここで、電圧上限値をνUL、電圧下限値をνLLとすると、電圧中央値νCは次式で表される。
【0066】
νC=(νUL+νLL)/2
【0067】
そして、複数の地点電圧を中央値に近づける制御を行う場合には、より電圧上下限値に近い値を重視すべきである。そのため、複数の電圧値を制御に反映させる場合、各地点の電圧値に応じて重み付けを行うこととする。具体的には、より電圧上下限に近い電圧値ほど重み付けを大きくして制御への反映感度を上げる一方、電圧上下限に遠い電圧値の重み付けは小さくして制御への反映感度を下げるようにすればよい。
【0068】
ν1,k>ν2,kのとき、電圧値ν1,kの重みβ1,kおよび電圧値ν2,kの重みβ2,kを算出し、制御対象電圧νγ,kを以下のように算出する。なお、ν1,k<ν2,kのときはこれとは逆の操作を行う。
【0069】
β1,k=Δν2,k/(Δν1,k+Δν2,k)
β2,k=1−β1,k=Δν1,k/(Δν1,k+Δν2,k)
νγ,k=β1,k・ν1,k+β2,k・ν2,k (7)
ただし、
Δν1,k=νUL−ν1,k
Δν2,k=ν2,k−νLL
【0070】
(7)式で算出した加重平均電圧νγ,kを第k番目の電圧制御機器10の制御対象電圧として、目的関数V(ν)を以下のように定義する。
【0071】
V(ν)=1/2・(νγ−νC)T・M・(νγ−νC)
【0072】
この場合、時刻τにおける指標sは次式のように表される。
【0073】
s(τ)=w(τ)・A(τ)・R
=(νγ−νC)T・M・A(τ)・R
【0074】
4.2 行列Aの算出
重み行列Mとタップ1段の変化幅riを既知とすると、指標sの計算に必要な情報は制御対象地点の電圧値νと行列Aである。行列Aは上述した系統構成情報に該当する。電圧値νについては黒板手段301を介して情報を得ることができるが、行列Aの算出には多くの系統情報と複雑な計算が必要となる。そこで、次のようにして行列Aの算出を簡略化してもよい。この算出方法は、ある電圧制御機器10が動作した場合、その影響が系統上位から下位へと伝わるが、並列の他フィーダや、系列下位から上位へと伝わることは少ないという性質を利用したものである。具体的には、集中制御装置30は、系統内で最上位の母線を1つ指定し、その母線から各母線の繋がりを放射状に認識する。そして、母線の階層情報に基づいて行列Aを算出する。
【0075】
例えば、図3に示したような電力系統において、第k番目の電圧制御機器10の一次母線電圧および二次母線電圧をνp,kおよびνq,k、系統上位の集合をUk、系統下位の集合をLkとする。この場合、行列Aの要素は次のように決まる。
【0076】
∂νi/∂nk≒∂νp,k/∂nk=0 (iがUkに属する場合)
∂νi/∂nk≒∂νq,k/∂nk=1 (iがLkに属する場合)
∂νi/∂nk=0 (iがUk、Lkのいずれにも属さない場合)
【0077】
系統内に、自動電圧制御装置(AVR)の機能を有する分散電源などが連系されている場合、その分散電源は電圧値を一定に保とうとする。そこで、下記のインピーダンス比例配分法によって系統下位の集合Lkに係る要素を修正してもよい。例えば、図4に示したように電力系統にAVR機能を有する分散電源(DG)が連系されているとすると、次式の概念を系統下位の集合Lkに与えるとよい。なお、Ziは各母線間のインピーダンスである。
【0078】
∂νn/∂nn=Σi=1kZi/Σi=1NZi×Σi=1nZi/Σi=1kZi
=Σi=1nZi/Σi=1NZi
ただし、タップの向きが逆転する場合は次式を用いる。
∂νn/∂nn=−Σi=1kZi/Σi=1NZi×Σi=1nZi/Σi=1kZi
=−Σi=1nZi/Σi=1NZi
【0079】
4.3 ローカルな目的関数の変化量
いま、(1)式の目的関数が上記例1および例2のように系統各所のローカルな目的関数の合計値で表されている場合を想定する。通常は、このような目的関数の構成が現実的である。すなわち、
【0080】
V(ν)=Σz=1ZVz(ν)
【0081】
ただし、Zはローカルな目的関数の総数を、Vz(ν)は第z番目のローカルな目的関数を表す。このとき、電圧制御機器10の制御量変化に対して目的関数のΔV(ν)は次のように書ける。
【0082】
ΔV(ν)=Σz=1ZΔVz(ν) (8)
【0083】
さらに、上記のローカルな目的関数の変化は以下のように算出できる。
【0084】
ΔVz(τ)=wz(τ)・A(τ)・Δn(τ)
=Σi=1Nszi(τ)fi(τ)
ただし、
sz(τ)=wz(ν)・A(τ)・R
wz=[wz1 … wzX]=[∂Vz/∂ν]
【0085】
szk(τ)は、任意に設定するローカルな目的関数Vz(ν)に対し、第k番目の電圧制御機器10を動作させた場合の目的関数の変化を表している。なお、sz(τ)は次式のように指標sの構成要素である。
【0086】
s(τ)=Σz=1Zsz(τ)
【0087】
4.4 指標sの別例
上記説明は、電圧制御機器10がSVRやLRTなどのタップ切替式変圧器であることを前提としているが、本発明はこれに限定されない。電圧制御機器10は、ShC(Shunt Capacitor:分路コンデンサ)やShR(Shunt Reactor:分路リアクトル)などのタップ切替式並列無効電力供給機器や、SVC(Static Var Compensator:静止型無効電力補償装置)などのFACTS(Flexible AC Tansmission System)機器であってもよい。特に、FACTS機器は1秒以内の高速な制御が可能であり、上記のタップ機器とは異なり、制御量は連続的である。
【0088】
電圧制御機器10がShC、ShR、SVCなどの無効電力供給機器である場合、定式化には(5)式ではなく次式を用いる。Qは無効電力注入量である。
【0089】
ΔV(τ)=∂V/∂ν・∂h/∂Q・ΔQ(τ)
=w(τ)・A(τ)・R・f(τ)
=s(τ)・f(τ)
=[s1(τ) … sN(τ)][f1(τ) … fN(τ)]T
=Σi=1Nsi(τ)fi(τ)
ただし、
s(τ)=w(τ)・A(τ)・R
w=[∂V/∂ν]
A=[∂h/∂Q]=[∂ν/∂Q]
【0090】
行列wは、制御対象地点の電圧変化量に対する目的関数の変化量を表す行列である。また、行列Aは、電圧制御機器10の制御量に対する制御対象地点の電圧変化量を表す行列である。
【0091】
このように、電圧制御機器10の制御変数に応じて行例Aは変わり得る。なお、制御変数が無効電力注入量Qである場合、第i番目の電圧制御機器10に係る指標sは次式で表される。
【0092】
si=[∂V/∂ν1 … ∂V/∂νX][∂ν1/∂Qi … ∂νX/∂Qi]Tri
【0093】
4.5 本定式化の利点および特徴
本定式化の利点および特徴は以下のようにまとめられる。
【0094】
1)従来手法は、タップ機器の制御問題をダイナミックシステムの制御の問題として定式化したため、システムの安定性を常に念頭に置く必要があった。これは、自動制御システムとしての機能を重視していたためである。しかし、本定式化は目的関数の改善だけに着目し、制約付き非線形計画法として定式化したことで、ダイナミックシステム制御の観点を無視している。このため、制御対象地点の各電圧値から算出される目的関数以外の挙動については考慮しておらず、制御を実施する際に特定箇所の電圧などが問題となる場合には目的関数に加えるなどの対応が別途必要になる。しかし、これは電圧制御機器や制御対象地点の最適配置の問題であり、制御系の設計においては、どのような場合も必要となる共通的な検討事項である。
【0095】
2)ダイナミックシステムとしての議論をしないため、システムの可制御性の議論も不要である。本定式化では可制御でない観測点やローカルな目的関数が混在しても無視されるのみである。この性質は完全に独立した自動制御システムとして構築する場合には大きな問題となるが、黒板方式で全体情報を監視しながら制御を行う場合には問題とならない。
【0096】
3)従来手法では、独立した自動制御システムを構築するために平衡状態の議論が不可欠であった。平衡状態は、目的関数の設定時に矛盾が生じないように適切に確保しておかないと有害なハンチングなどの振動現象を誘発する。一方、本定式化では目的関数の設定のみが必要である。
【0097】
4)従来手法では、上記の例1に係る目的関数を設定した。これは、ダイナミックシステムの安定性を保証するリアプノフ関数としての性格を持つため、設定する目的関数にはリアプノフ関数として使うための制約があったためである。一方、本定式化では、このような制約が一切ないため、目的関数を任意に設定できる点が有利である。
【0098】
5)非線形計画問題の最適化を求める問題として定式化しているので、制御対象地点や電圧制御機器の数などに関して格段に自由度がある。
【0099】
6)目的関数の設定に自由度があるため、任意の設定に関して(8)式の形で電圧制御機器10の制御量に対する目的関数の詳細変化を予想できる。これは、黒板形式の制御法と組み合わせた場合、制御性能を高める上で大きな利点となる。
【0100】
5 個別制御装置20の動作例
次に、本システムが自律分散制御方式で動作する場合における個別制御装置20の動作例について図5のフローチャートを参照しながら説明する。図6は、黒板手段301が保持する各種情報の一例を模式的に表として表したものである。なお、表中の各列は各個別制御装置20が書き込んだ情報であり、V1、V2は各電圧制御機器10の一次母線電圧値[p.u.]および二次母線電圧値[p.u.]を表す。
【0101】
ステップ1:対応する電圧制御機器10の一次母線電圧値および二次母線電圧値の計測する。なお、適宜、計測値のフィルタリングを行ってもよい。
【0102】
ステップ2:計測した電圧値およびタップ比などを黒板手段301に書き込む。このとき、対応する電圧制御機器10の信憑性フラグを“1”に更新する。
【0103】
ステップ3:黒板手段301から、信憑性フラグが“1”である他の電圧制御機器10の情報を読み込み、知識部204に保存する。なお、信憑性フラグが“0”である他の電圧制御機器10の情報については、1)読み込まない、2)推定する、3)重み付けを小さくする、などの処置をする。
【0104】
ステップ4:指標sを計算する。例えば、上記の目的関数の例2の場合には加重平均電圧νγを計算する。
【0105】
ステップ5:指標sの移動平均値s_aveを計算し、黒板手段301に書き込む。例えば、第k番目の電圧制御機器10に係る移動平均値は次式で表される。ただし、aは指標sのサンプル個数、miは各サンプルの重みである。
【0106】
s_avek=Σb=0a-1mb(sk,t-b/a)
【0107】
ステップ6:移動平均値の絶対値|s_avek|と閾値αとを比較する。もし、|s_avek|<αなら、タイマーをリセットし、黒板手段301にタイマーリセットの情報を書き込んで終了する。
【0108】
ステップ7:|s_avek|>αなら、タイマーが停止している場合はタイマーをスタートさせ、黒板手段301にタイマースタートの情報を書き込む。タイマーがすでにスタートしていたならタイマーを継続させる。
【0109】
ステップ8:黒板手段301を参照して、自身の移動平均値が最大かどうか、すなわち、タイマーがスタートしている他のどの電圧制御機器10の移動平均値よりも大きいかどうかを確認する。
【0110】
ステップ9:|s_avek|が最大なら、特別の制御規範を満たすか否かを判定する。例えば、移動平均値や電圧違反の積分値が相当程度大きい場合、タイマーが上限に達しなくても、対応する電圧制御機器10に対して動作指示をする。なお、このステップの実行は任意であり、省略してもよい。
【0111】
ステップ10:タイマーが上限に達したかどうかを判定する。もし、タイマーがまだ上限に達していなければ終了する。
【0112】
ステップ11:自身の移動平均値と同じ値の移動平均値が他に存在するかどうかを判定する。もし、存在しなければ、対応する電圧制御機器10が動作可能かどうかの判定に進む。
【0113】
ステップ12:もし、自身の移動平均値と同じ値の移動平均値が他にも存在すれば、電圧偏差|νk−νR|が不感帯εよりも大きいかどうかを判定する。もし、大きければ、対応する電圧制御機器10が動作可能かどうかの判定に進み、小さければ終了する。
【0114】
ステップ13:対応する電圧制御機器10が動作可能であるかどうかを判定する。もし、電圧制御機器10のタップ値が上限値あるいは下限値に達している場合、さらにタップ値を上げるあるいは下げるという動作は不可能である。
【0115】
ステップ14:対応する電圧制御機器10が動作可能であれば、当該電圧制御機器10に動作指示を出す。そして、黒板手段301において自身に関する各種フラグ(例えば、動作可能フラグなど)をリセットして終了する。
【0116】
ステップ15:対応する電圧制御機器10が動作不可能であれば、黒板手段301において自身に関する各種フラグをリセットして終了する。なお、サブタイマーをスタートさせて、動作不可能な状態が一定期間以上継続するようであれば、他の電圧制御機器10に動作指示を出すようにしてもよい。
【産業上の利用可能性】
【0117】
本発明に係る電力系統電圧制御システムおよび方法は、電力系統に配置された複数の電圧制御機器を用いてそれよりも多い制御対象地点の電圧を制御することができるため、配電系統や船舶内系統の電圧制御に有用である。
【符号の説明】
【0118】
10 電圧制御機器
20 個別制御装置
206 計算部(計算手段)
306 計算部(計算手段)
301 黒板手段
【特許請求の範囲】
【請求項1】
複数の電圧制御機器が配置された電力系統の電圧を制御するシステムであって、
前記複数の電圧制御機器の数よりも多い制御対象地点の電圧値が読み書きされる黒板手段と、
前記黒板手段が保持する前記制御対象地点の電圧値に基づいて前記複数の電圧制御機器のそれぞれに係る指標sを計算し、当該計算した指標sに基づいて、前記複数の電圧制御機器のうち制御量を変更すべき電圧制御機器を選択する計算手段と、
前記複数の電圧制御機器のそれぞれに対応して設けられ、前記選択された電圧制御機器に対して、前記制御対象地点の電圧値を引数とする目的関数の値が減少するように制御量を変更する指示をする複数の個別制御装置とを備え、
前記指標sが、前記制御対象地点の電圧変化量に対する前記目的関数の変化量と、前記電圧制御機器の制御量に対する前記制御対象地点の電圧変化量と、前記電圧制御機器が1回の動作で前記目的関数に与える影響度とに基づいて算出される
ことを特徴とする電力系統電圧制御システム。
【請求項2】
請求項1に記載の電力系統電圧制御システムにおいて、
第i番目の前記電圧制御機器が、タップ切替式変圧器であり、
第i番目の前記電圧制御機器に係る指標sが、
si=[∂V/∂ν1 … ∂V/∂νX][∂ν1/∂ni … ∂νX/∂ni]Tri
(ただし、Vは前記目的関数、ν1,…,νXはある時刻における前記制御対象地点の各電圧値、niは前記時刻における当該電圧制御機器のタップ値、riは当該電圧制御機器のタップ1段の変化幅である。)である
ことを特徴とする電力系統電圧制御システム。
【請求項3】
請求項1および2のいずれか一つに記載の電力系統電圧制御システムにおいて、
前記計算手段は、前記複数の電圧制御機器のうち指標sの絶対値が閾値よりも大きくかつ最大であるいずれか一つの電圧制御機器を選択する
ことを特徴とする電力系統電圧制御システム。
【請求項4】
請求項1および2のいずれか一つに記載の電力系統電圧制御システムにおいて、
前記計算手段は、前記複数の個別制御装置のそれぞれに分散して設けられた複数の計算部であり、
前記計算部は、対応する前記電圧制御機器に係る指標sを計算するものであり、
前記個別制御装置は、対応する前記電圧制御機器に係る指標sの絶対値が閾値よりも大きい場合、当該電圧制御機器に対して制御量を変更する指示をする
ことを特徴とする電力系統電圧制御システム。
【請求項5】
請求項4に記載の電力系統電圧制御システムにおいて、
前記計算部は、所定期間、対応する前記電圧制御機器に係る指標sの計算を繰り返し、そのいずれもが前記閾値よりも大きい場合、当該電圧制御機器に対して制御量を変更する指示をする
ことを特徴とする電力系統電圧制御システム。
【請求項6】
請求項1から5のいずれか一つに記載の電力系統電圧制御システムにおいて、
前記指標sが、移動平均値である
ことを特徴とする電力系統電圧制御システム。
【請求項7】
請求項1から6のいずれか一つに記載の電力系統電圧制御システムにおいて、
前記黒板手段は、前記制御対象地点の各電圧値の信憑性を示すフラグを含み、
前記計算手段は、前記黒板手段が保持する前記制御対象地点の電圧値のうち前記フラグによって信憑性が示されている電圧値を、前記複数の電圧制御機器のそれぞれに係る指標sの計算に用いる
ことを特徴とする電力系統電圧制御システム。
【請求項8】
複数の電圧制御機器が配置された電力系統の電圧を制御する方法であって、
前記複数の電圧制御機器のそれぞれに係る指標sを計算する第1のステップと、
前記計算された指標sに基づいて、前記複数の電圧制御機器のうち制御量を変更すべき電圧制御機器を選択する第2のステップと、
前記電圧制御機器の数よりも多い制御対象地点の電圧値を引数とする目的関数の値が減少するように、前記選択された電圧制御機器の制御量を変更する第3のステップとを備え、
前記指標sが、前記制御対象地点の電圧変化量に対する前記目的関数の変化量と、前記電圧制御機器の制御量に対する前記制御対象地点の電圧変化量と、前記電圧制御機器が1回の動作で前記目的関数に与える影響度とに基づいて算出される
ことを特徴とする電力系統電圧制御方法。
【請求項9】
請求項8に記載の電力系統電圧制御方法において、
第i番目の前記電圧制御機器が、タップ切替式変圧器であり、
第i番目の前記電圧制御機器に係る指標sが、
si=[∂V/∂ν1 … ∂V/∂νX][∂ν1/∂ni … ∂νX/∂ni]Tri
(ただし、Vは前記目的関数、ν1,…,νXはある時刻における前記制御対象地点の各電圧値、niは前記時刻における当該電圧制御機器のタップ値、riは当該電圧制御機器のタップ1段の変化幅である。)である
ことを特徴とする電力系統電圧制御方法。
【請求項10】
請求項8および9のいずれか一つに記載の電力系統電圧制御方法において、
前記第2のステップでは、前記複数の電圧制御機器のうち指標sの絶対値が閾値よりも大きくかつ最大であるいずれか一つの電圧制御機器が選択される
ことを特徴とする電力系統電圧制御方法。
【請求項11】
請求項8および9のいずれか一つに記載の電力系統電圧制御方法において、
前記第2のステップでは、前記複数の電圧制御機器のうち指標sの絶対値が閾値よりも大きい一または複数の電圧制御機器が選択される
ことを特徴とする電力系統電圧制御方法。
【請求項1】
複数の電圧制御機器が配置された電力系統の電圧を制御するシステムであって、
前記複数の電圧制御機器の数よりも多い制御対象地点の電圧値が読み書きされる黒板手段と、
前記黒板手段が保持する前記制御対象地点の電圧値に基づいて前記複数の電圧制御機器のそれぞれに係る指標sを計算し、当該計算した指標sに基づいて、前記複数の電圧制御機器のうち制御量を変更すべき電圧制御機器を選択する計算手段と、
前記複数の電圧制御機器のそれぞれに対応して設けられ、前記選択された電圧制御機器に対して、前記制御対象地点の電圧値を引数とする目的関数の値が減少するように制御量を変更する指示をする複数の個別制御装置とを備え、
前記指標sが、前記制御対象地点の電圧変化量に対する前記目的関数の変化量と、前記電圧制御機器の制御量に対する前記制御対象地点の電圧変化量と、前記電圧制御機器が1回の動作で前記目的関数に与える影響度とに基づいて算出される
ことを特徴とする電力系統電圧制御システム。
【請求項2】
請求項1に記載の電力系統電圧制御システムにおいて、
第i番目の前記電圧制御機器が、タップ切替式変圧器であり、
第i番目の前記電圧制御機器に係る指標sが、
si=[∂V/∂ν1 … ∂V/∂νX][∂ν1/∂ni … ∂νX/∂ni]Tri
(ただし、Vは前記目的関数、ν1,…,νXはある時刻における前記制御対象地点の各電圧値、niは前記時刻における当該電圧制御機器のタップ値、riは当該電圧制御機器のタップ1段の変化幅である。)である
ことを特徴とする電力系統電圧制御システム。
【請求項3】
請求項1および2のいずれか一つに記載の電力系統電圧制御システムにおいて、
前記計算手段は、前記複数の電圧制御機器のうち指標sの絶対値が閾値よりも大きくかつ最大であるいずれか一つの電圧制御機器を選択する
ことを特徴とする電力系統電圧制御システム。
【請求項4】
請求項1および2のいずれか一つに記載の電力系統電圧制御システムにおいて、
前記計算手段は、前記複数の個別制御装置のそれぞれに分散して設けられた複数の計算部であり、
前記計算部は、対応する前記電圧制御機器に係る指標sを計算するものであり、
前記個別制御装置は、対応する前記電圧制御機器に係る指標sの絶対値が閾値よりも大きい場合、当該電圧制御機器に対して制御量を変更する指示をする
ことを特徴とする電力系統電圧制御システム。
【請求項5】
請求項4に記載の電力系統電圧制御システムにおいて、
前記計算部は、所定期間、対応する前記電圧制御機器に係る指標sの計算を繰り返し、そのいずれもが前記閾値よりも大きい場合、当該電圧制御機器に対して制御量を変更する指示をする
ことを特徴とする電力系統電圧制御システム。
【請求項6】
請求項1から5のいずれか一つに記載の電力系統電圧制御システムにおいて、
前記指標sが、移動平均値である
ことを特徴とする電力系統電圧制御システム。
【請求項7】
請求項1から6のいずれか一つに記載の電力系統電圧制御システムにおいて、
前記黒板手段は、前記制御対象地点の各電圧値の信憑性を示すフラグを含み、
前記計算手段は、前記黒板手段が保持する前記制御対象地点の電圧値のうち前記フラグによって信憑性が示されている電圧値を、前記複数の電圧制御機器のそれぞれに係る指標sの計算に用いる
ことを特徴とする電力系統電圧制御システム。
【請求項8】
複数の電圧制御機器が配置された電力系統の電圧を制御する方法であって、
前記複数の電圧制御機器のそれぞれに係る指標sを計算する第1のステップと、
前記計算された指標sに基づいて、前記複数の電圧制御機器のうち制御量を変更すべき電圧制御機器を選択する第2のステップと、
前記電圧制御機器の数よりも多い制御対象地点の電圧値を引数とする目的関数の値が減少するように、前記選択された電圧制御機器の制御量を変更する第3のステップとを備え、
前記指標sが、前記制御対象地点の電圧変化量に対する前記目的関数の変化量と、前記電圧制御機器の制御量に対する前記制御対象地点の電圧変化量と、前記電圧制御機器が1回の動作で前記目的関数に与える影響度とに基づいて算出される
ことを特徴とする電力系統電圧制御方法。
【請求項9】
請求項8に記載の電力系統電圧制御方法において、
第i番目の前記電圧制御機器が、タップ切替式変圧器であり、
第i番目の前記電圧制御機器に係る指標sが、
si=[∂V/∂ν1 … ∂V/∂νX][∂ν1/∂ni … ∂νX/∂ni]Tri
(ただし、Vは前記目的関数、ν1,…,νXはある時刻における前記制御対象地点の各電圧値、niは前記時刻における当該電圧制御機器のタップ値、riは当該電圧制御機器のタップ1段の変化幅である。)である
ことを特徴とする電力系統電圧制御方法。
【請求項10】
請求項8および9のいずれか一つに記載の電力系統電圧制御方法において、
前記第2のステップでは、前記複数の電圧制御機器のうち指標sの絶対値が閾値よりも大きくかつ最大であるいずれか一つの電圧制御機器が選択される
ことを特徴とする電力系統電圧制御方法。
【請求項11】
請求項8および9のいずれか一つに記載の電力系統電圧制御方法において、
前記第2のステップでは、前記複数の電圧制御機器のうち指標sの絶対値が閾値よりも大きい一または複数の電圧制御機器が選択される
ことを特徴とする電力系統電圧制御方法。
【図1】


【図2】
【図3】
【図4】

【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2013−74696(P2013−74696A)
【公開日】平成25年4月22日(2013.4.22)
【国際特許分類】
【出願番号】特願2011−211054(P2011−211054)
【出願日】平成23年9月27日(2011.9.27)
【出願人】(504136568)国立大学法人広島大学 (924)
【Fターム(参考)】
【公開日】平成25年4月22日(2013.4.22)
【国際特許分類】
【出願日】平成23年9月27日(2011.9.27)
【出願人】(504136568)国立大学法人広島大学 (924)
【Fターム(参考)】
[ Back to top ]