
株式会社創発システム研究所により出願された特許
1 - 10 / 10
長尺ケーブルを介して駆動する道路トンネルのジェットファン用誘導電動機の可変速駆動装置
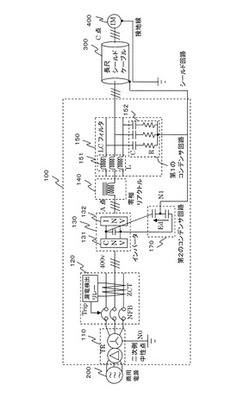
【課題】長尺ケーブルを介してジェットファンを駆動した場合に起こり得るインバータのスイッチングサージによる電動機の絶縁劣化、高周波数帯のEMI問題、長尺ケーブルの浮遊容量と対地の間に流れる同相電流による漏電ブレーカー誤動作を解消する。
【解決手段】交流/直流変換器131により電源入力を交流から直流に変換し、インバータ回路132により直流を可変周波数可変電圧の三相交流に変換し、その三相出力端子に直列に同相リアクトル140と交流リアクトル151を設け、交流リアクトル151の後にスター接続された第1のコンデンサ回路152を並列接続し、その端子電圧を長尺ケーブル300を通してジェットファン400に供給し、第1のコンデンサ回路152のスター接続の中点を交流/直流変換器131の中性点などに接続し、交流/直流変換器131の同相成分とインバータ回路132の同相成分を還流せしめ、同相電圧を低減する。
(もっと読む)
トンネルデータ処理システムおよびトンネルデータ処理方法

【課題】 GPSが利用できないトンネル内において、距離メータなどの機械的計測により得た入力データに対してGPSや距離メータ等に起因する誤差を正確に補正する。
【解決手段】 走行する車両に搭載された距離メータやジャイロ装置などの位置検知手段210により測定した原座標系の位置データと、車両に搭載された壁面検知手段120により位置データと同期させた原座標系のトンネル内面点群データをデータ入力部120を介して入力する。入口被検知板310に関するGPSでの計測データと既知の位置データの差分からGPSの誤差を補正し、出口被検知板320に関する距離メータの計測データと既知の位置データの差分からトンネル内で距離メータの誤差により蓄積したトンネル内計測誤差の総計を算出し、キロポスト上の任意の点に対してはトンネル内計測誤差を按分して補正する。
(もっと読む)
長距離道路トンネル用換気制御システム
【課題】 省電力化を可能とし、制御信号に含まれるサージを抑えたインバータ制御によるジェットファン運転を可能とした縦流換気システムを提供する。
【解決手段】 複数のジェットファン110が設置される長距離道路トンネル用換気制御システム100である。長距離道路トンネル200内に適正間隔で複数のジェットファン110配設されている。制御部130、変電設備140、インバータ150をトンネル入口または出口に配設し、ケーブル160を敷設する。すべてのジェットファン110に対してインバータ150によりケーブル160を介して同一の可変周波数電力を供給し、一体的にインバータ駆動する。インバータ150を入口および出口の2カ所に設置し、入口側のジェットファン110と、出口側のジェットファン110に分けてインバータ駆動したり、n台のインバータによりジェットファン110をn系統のグループに分けて制御することも可能である。
(もっと読む)
対面通行トンネルのジェットファンによるトンネル換気制御システム
【課題】 フィードバック制御、フィードフォワード制御を工夫して省電力化を可能としたトンネル換気制御システムを提供する。
【解決手段】 フィードフォワード制御部140は煙霧透過率目標値とCO濃度目標値とセンサ部110で実測したトンネル内の各種データとモデル記憶部120内の風速モデルと交通モデルと汚染濃度モデルを用いた自然風予測と交通風予測と汚染発生量予測を行い、断面風速目標値と換気機器制御目標値を決定する。最適選定計画決定部160により換気機器10の並列運転台数と回転数との関係、正逆逆転時における自然風の自然換気方向と対面交通による交通換気方向との関係とを考慮した省エネ最適選定計画を決める。断面風速目標値に関する第1のフィードバック補正と換気機器制御目標値に対する第2のフィードバック補正をカスケード制御で行い、ハイブリッド適応制御部180はフィードバック補正と省エネ最適選定計画とを組み合わせた適応制御を行う。
(もっと読む)
対面通行トンネルのジェットファンによるトンネル換気制御システム
【課題】 フィードバック制御、フィードフォワード制御を工夫して省電力化を可能としたトンネル換気制御システムを提供する。
【解決手段】 フィードフォワード制御部140は煙霧透過率目標値とCO濃度目標値とセンサ部110で実測したトンネル内の各種データとモデル記憶部120内の風速モデルと交通モデルと汚染濃度モデルを用いた自然風予測と交通風予測と汚染発生量予測を行い、断面風速目標値と換気機器制御目標値を決定する。最適選定計画決定部160により換気機器10の並列運転台数と回転数との関係、正逆逆転時における自然風の自然換気方向と対面交通による交通換気方向との関係とを考慮した省エネ最適選定計画を決める。断面風速目標値に関する第1のフィードバック補正と換気機器制御目標値に対する第2のフィードバック補正をカスケード制御で行い、ハイブリッド適応制御部180はフィードバック補正と省エネ最適選定計画とを組み合わせた適応制御を行う。
(もっと読む)
物体検査装置および不良品選別システム
【課題】 3次元物体の歪み、隔壁厚みのばらつき、内部の空胞の有無を解析する物体検査装置、不良品を選別除去する不良品選別システムを提供する。
【解決手段】 垂直型スキャナ10の画像読み取りガラス面11は垂直に設けられている。重量計20が垂直型スキャナ10の前方に設けられている。被検査対象の資材などの3次元物体が重量計20の計量皿21の上に載せ置かれ、3次元物体の垂直断面が画像読み取りガラス面11の前方の所定位置となる。3次元物体は所定位置において、3次元物体の少なくとも重心が重量計20の上に位置し、かつ、垂直型スキャナ10の焦点が、画像読み取りガラス面11ではなく3次元物体の垂直断面となるように調整されており、3次元物体の重量情報および垂直断面の画像情報を取得し、さらに3次元物体を90度回転させて長さを測定し、単位長さあたりの重量を算出する。基準の画像情報と基準の単位長さあたりの重量情報と比較することにより良品・不良品の判定をする。
(もっと読む)
画像処理装置
【課題】 画像読み取りガラス面の所定位置に3次元物体を時間や手間をかけずに簡単に画像を読み取り解析する画像処理装置を提供する。
【解決手段】 スキャナ装置10には画像読み取りガラス面11の周囲に設けられたスライダー20とスライダー20に連動してスライド移動して3次元物体の案内となるガイド30とスライド移動後のガイド30の座標位置を検出するカウンタ40を備えている。スキャナ装置10により読み取った画像データとガイド30の座標位置データが画像データ処理部50に送られる。座標変換機能52により読み取り画像データを座標変換する。さらにイメージノギス機能53によりあらかじめ設定されている特定個所のサイズを計測し、良品・不良品のチェックをする。
(もっと読む)
画像処理装置
【課題】 画像読み取りガラス面の所定位置に3次元物体を時間や手間をかけずに簡単に画像を読み取り解析する画像処理装置を提供する。
【解決手段】 スキャナ装置10には画像読み取りガラス面11の周囲に設けられたスライダー20とスライダー20に連動してスライド移動して3次元物体の案内となるガイド30とスライド移動後のガイド30の座標位置を検出するカウンタ40を備えている。スキャナ装置10により読み取った画像データとガイド30の座標位置データが画像データ処理部50に送られる。座標変換機能52により読み取り画像データを座標変換する。さらにイメージノギス機能53によりあらかじめ設定されている特定個所のサイズを計測し、良品・不良品のチェックをする。
(もっと読む)
ボリュームデータレンダリングシステムおよびボリュームデータレンダリング処理方法
【課題】
3次元ボリュームデータのゆらぎ表現の付加、さらに視聴者が直感的に把握しやすい速度表現も可能としたボリュームデータのレンダリングシステムを提供する。
【解決手段】
ボリュームデータ取得モジュールによりボリュームデータを入力し、ボクセルデータセット生成モジュールにより輝度値及び不透明度が与えられたボクセルデータセットを生成する。ボクセルデータセットからボクセルをサンプリングする際、ゆらぎ処理モジュールのゆらぎモデルに基づいたゆらぎを持たせつつボクセルの選択を行う。積分モジュールがサンプリングされたボクセルの輝度値及び不透明度を基に描画する画素データを計算する。描画モジュールはレイキャスティングモジュールから渡された画素データを描画する。さらに速度場モデルを持つ速度場処理モジュールによって速度表現を織り込んだ形のゆらぎ処理を行い、視聴者にボリュームデータの速度を表現する。
(もっと読む)
垂直断面形状読み取り装置および不良品選別システム
【課題】 垂直切断面全面をその外形エッジを含めて垂直の姿勢のまま正確に読み取ることができる垂直断面形状読み取り装置を提供する。
【解決手段】 搬送系により3次元物体を搬送する。スライダーは所定位置に来た3次元物体をスライドさせてその垂直断面方向が所定方向となるように姿勢しつつ搬送系の終端まで導く。さらにスライダーは3次元物体のみを撮像装置30の方向に押し出して、その垂直断面を撮像装置30に対向する所定位置までスライドさせる。撮像装置30のスキャン焦点深度の位置は、搬送系の終端位置と撮像装置30の画像読み取りガラス面位置との間に調整されている。撮像装置のスキャン焦点は搬送系の終端には合わず、3次元物体の垂直断面のみに合い、3次元物体の垂直断面のみが強調された画像データを読み取ることができる。
(もっと読む)
1 - 10 / 10
[ Back to top ]