
旭光電機株式会社により出願された特許
21 - 30 / 45
液体品質管理システム
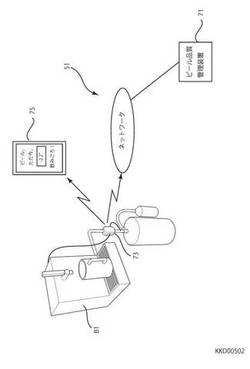
【課題】液体の品質管理のばらつきをなくす液体品質管理装置の提供
【解決手段】ビール品質管理システム51は、ビール品質管理装置71、センサ情報取得管理装置73、温度表示パネル75を有している。ビール品質管理装置71は、センサ情報取得管理装置73からセンサ情報を取得する。ビール品質管理装置71は、取得したセンサ情報に基づいて、品質管理のための水洗浄、スポンジ洗浄の実施状況を判断する。センサ情報取得管理装置73は、飲食店等に設置されているビールサーバB1のビール供給管路に設置され、ビール検知センサを用いてビールサーバB1の管理状態を検知する。そして、取得したセンサ情報を蓄積し、ビール品質管理装置71へ送信する。センサ情報取得管理装置73は、冷却水温度センサを用いて、ビールサーバB1の冷却水の温度を測定する。温度表示パネル75は、センサ情報取得管理装置73から温度情報を取得し、パネル上に表示する。
(もっと読む)
液体供給装置及び稼働状況管理装置

【目的】 設置場所の適否を判断し、判断結果を示唆が可能となる液体供給装置の提供
【解決手段】 コンプレッサ23は、冷媒を冷凍ユニット25→蒸発管27へ辿る経路に循環させる。冷媒は、水槽22において蒸発管27を通過する際に蒸発し、冷却水との間で熱交換を行う。これにより、蒸発管27の周囲には、氷が形成される。蒸発管27の周囲に形成される氷の厚さによって、冷却水の温度を制御することができる。水槽22に位置する蒸発管27の近傍に配置されている氷着センサ51は、蒸発管27の周りに所定の厚さの氷が形成されているか否かを検知する。コンプレッサ23は、氷着センサ51はからの信号に基づいて、動作する。したがって、コンプレッサ23の1日の動作状態を観察することによって、冷却水をどれだけ冷却する必要があったのかが分かり、ひいては、ビールサーバ1が適切な環境に設置されているか否かを、判断することが可能となる。
(もっと読む)
フレキシブルセンサチューブ
【課題】瓦礫内探索ロボットが瓦礫に埋もれた人を発見した場合に、その位置を正確に把握することを目的とする。
【解決手段】瓦礫内探索ロボットが外部の空気コンプレッサーから空気圧チューブやCCDカメラ等の信号情報ケーブルで結ばれる必要性があることに鑑み、瓦礫内探索ロボットと外部の空気コンプレッサーとを結ぶ空気圧チューブやロボットに取り付けられたCCDカメラ等の信号情報ケーブルを多関節構造のチューブで覆い、各関節角をポテンショメータ等のセンサにより検出し、そのセンサの出力信号から多関節構造のチューブの全体形状を算出することにより、多関節構造のチューブの先端部に位置する瓦礫内探索ロボットの位置を同定する。
(もっと読む)
汎用ロボット移動教示装置
【課題】関節数等構成・形状の異なる様々なロボットに対して広汎にハンド・関節の移動後の座標・姿勢を教示することができる装置を提供すること
【解決手段】可動部を有するチューブが多数連なるチューブ群と隣接するチューブ間の角度を検出するフレキシブルセンサチューブと情報教示部より成り、1又は複数の特定のチューブについての変形後の座標及び/又は姿勢を算出し、逆運動学に基づいて教示対象ロボットの対応する1又は複数の特定の部分及び/又は中間部分についての移動後の座標及び/又は姿勢を教示する汎用ロボット教示装置を提供する。
(もっと読む)
流体分配及び液体注出システム
【課題】
ビール樽等の貯蔵容器が空になった場合やビール樽等の貯蔵容器を交換した後の初期状態で発生する泡等を早期かつ正確に検知し、かつメンテナンス容易な手段で排出すること。
【解決手段】
流体を供給及び/または排出する流体分配システムであって、供給管路開閉手段が管路の一部を屈曲させた屈曲部を形成することにより流体の流れを遮断する開閉手段であり、かつ、制御手段は検知手段により検知された内容を取得し、取得内容により流体を液体と液体以外の流体とに分類する判断を行い、判断結果に基づいて液体について供給管路を通じて注出口に分配し、液体以外の流体について排出管路に分配する。
(もっと読む)
電力供給装置及び電力受給装置
【課題】電力を供給、受給できる距離を長くすることができる磁界の共鳴を用いた電力供給装置及び電力受給装置の提供
【解決手段】
電力供給装置21は、コイル211、磁界制御用回路213、筐体215、及び支持装置217を有している。筐体215は、コイル211を包含するとともに、一部に開口op1を有している。このため、筐体215は、コイル211が発生した磁界に対するシールドとして機能するとともに、開口op1の方向に向かう磁界、つまり所定の方向への指向性を有する磁界を生成する機能を有する。これにより、開口op1の方向に強い磁界を生成することができると同時に不要方向への磁界をカット出来る。
(もっと読む)
導電構造、アクチュエータ、可変抵抗器、回動部材、回動式コネクタ、電動機、コントローラ、回転情報検出装置、ストローク検出装置、および導電端子の製造方法
【課題】 相対的に移動する一対の部材を、その相対移動の拘束が少ない状態で電気的に接続することができる導電構造を提供する。
【解決手段】 基板7に配置された固定側電極9に導電性の導電端子10の上端を電気的に接続する。移動子2の上面には凹溝11を形成し、この凹溝11にイオン性液体12を充填し、凹溝11の底部に配置された移動側電極2bに電気的に接続する。このイオン性液体12には導電端子10の下端を浸漬させ、固定側電極9と移動側電極2bとを、導電端子10およびイオン性液体12により電気的に接続する。
(もっと読む)
電力供給システム
【課題】機器に対して選択的に電力を供給する電力供給システムを提供する。
【解決手段】電力供給システム1は、送電装置21、受電装置31、中継装置41を有する。かかる電力供給システム1は、例えば自動ドアシステムに用いられる。また、電力供給システム1は、送電装置21から中継装置41を介して受電装置31に対して電力を供給する。送電装置21は、送電側電磁場生成手段M211、制御手段M213、送電側共振周波数切り換え手段M215を有する。受電装置31は、受電側電磁場生成手段M311及び受電側共振周波数切り換え手段M315を有する。中継装置41は、第1の電磁場生成手段M411、第1の共振周波数切り換え手段M413、第2の電磁場生成手段M415、第2の共振周波数切り換え手段M417、及び制御手段M419を有する。これにより、中継装置を介して送電しようとする受電装置にのみ電力を供給することができる。
(もっと読む)
画像を利用したセンサレスモータ駆動ロボット
【課題】ハンドの移動の開始からワークの把持、さらに移動、ワークの解放に至る一連のプロセスの中で、位置認識の必要度合いに応じて必要な手段を確保して、全体として多関節アームロボットの効率的な移動、動作の実現を図ることを目的とする。
【解決手段】アーム及び/又はハンドの駆動を外部センサによるフィードバック機構を有さないモータにより行い、かつ、少なくともワーク検索位置からワーク把持まで等の移動及び動作はステレオカメラで撮像したワーク等の画像と予めデータベースに保存されたワーク等のテンプレート画像とのマッチングによるワーク等検出に基づいて前記モータにより行うことを特徴とする。
(もっと読む)
動作検出装置
【課題】 簡易な構成で可動部の動作を容易に検出することができる動作検出装置の提供
【解決手段】 動作検出装置1では、移動量検出センサ11のセンサ当接部133及び第3ワイヤ固定部材19は、中手指節関節J1、近位指節間関節J3、及び遠位指節間関節J5を挟んで配置される。よって、指の動作をワイヤ13の移動量として検出することができるので、簡易な構成で指の動作を検出することができる。また、移動量検出センサ11、第1ワイヤ経路固定部材15、第2ワイヤ経路固定部材17、及び第3ワイヤ固定部材19は、手の甲側に配置される。このように、移動量検出センサ11、第1ワイヤ経路固定部材15、第2ワイヤ経路固定部材17、及び第3ワイヤ固定部材19を指の可動方向とは異なる方向に配置することによって、指の動作する量に対してワイヤ13の移動量を増幅することができる。よって、移動量を確実に検出することができる。
(もっと読む)
21 - 30 / 45
[ Back to top ]