
株式会社プレックスにより出願された特許
71 - 75 / 75
布類展張搬送方法および装置
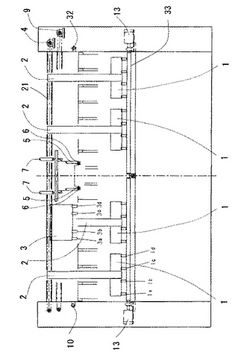
【課題】 従来技術と比べて高処理性能および高品質の布類展張搬送方法及び装置の提供。
【解決手段】 布類の一辺の両端角部を把持して上方に移送する投入装置と、投入装置から受け取った布類を左右に配置された第1のレールに沿って中央位置まで移動する横行チャックと、横行チャックから布類を受け取って展張装置に渡す受渡し装置と、左右に配置された第2のレールに沿って移動可能な一対のチャックから構成され、受渡し装置から布類を受け取って当該一対のチャックを離間せしめて左右に展張する展張装置と、左右に展張された布類を上下に展張する吸気装置と、展張装置から布類を受け取って搬送装置に受け渡す水平移動装置と、水平移動装置から布類を受け取って次工程に搬送する搬送装置とからなる布類展張搬送装置。
(もっと読む)
タオル折畳み方法及びタオル折畳み機

【課題】 タオルを縦3つ折りする場合、従来のタオル折畳み機では、タオル横幅の正確な1/3の位置で折畳むのが難しく、且つ大小タオルが混在した状態で供給できず、さらに各縦折り装置が大掛かりになる。
【解決手段】 搬送コンベア1上に載せ掛けたタオルYの左右各側縁Yaの位置をそれぞれ検出することでタオルYの左右幅(W1又はW2)を計測し、そのタオル幅データに基いて2本のガイド棒22,22をタオルの左右各側縁からタオルの幅方向1/3の位置に位置させるようにし、その後、タオルの左右各側縁部をそれぞれエアブローによって各ガイド棒22,22上に折返して、タオルを縦3つ折りできるので、各タオルを横幅1/3の位置で正確に折畳むことができ、且つ大小タオルが混在した状態で供給でき、さらに各縦折り装置(エアブロー装置)の構成が簡単になる。
(もっと読む)
立体計測装置及び方法
【課題】 操作性、安全性、計測精度、及び計測速度に優れた立体計測装置の提供。
【解決手段】 被計測物を載置する拡散板と、該拡散板の下に設置された1以上の照明用光源と、該拡散板に上方からライン光を照射する投光装置と、被計測物の上方に配置された撮像手段と、被計測物挿入孔と、制御部と、画像処理部を備えた立体計測装置であって、前記撮像手段は、択一的になされたライン光の照射と照明用光源の照射を撮像し、前記画像処理部は、照明用光源照射時の画像から被計測物の2次元形状情報を算出し、ライン光照射時の画像から被計測物の高さ情報を算出し、これらの情報から被計測物の立体計測情報を算出することを特徴とする立体計測装置。
(もっと読む)
脆弱物の把持装置
【課題】 障害物が密集した場所やインビトロ等の狭い作業空間において、脆弱物を把持および/または切断するためのロボットハンドの提供。
【解決手段】 一対の把持爪と、把持用アクチュエータと、把持用アクチュエータおよび把持爪とを連結する把持力伝達系とを備え、前記把持力伝達系の一部または全部が弾性特性を有する材料からなり、前記把持用アクチュエータの駆動により前記把持力伝達系および/または前記把持爪に撓みを生じさせながら脆弱物を把持するロボットハンド。
(もっと読む)
植物の自動分離・植込システム
【課題】 障害物が密集した場所やインビトロ等の狭い作業空間において、培養した無菌の植物を分割し、発根用容器に移し替える移植工程の自動化を可能にするシステムの提供。
【解決手段】 ロボット部と、センサ部と、先端に把持爪を有し、一部又は全部が弾性特性を有するロッドを備えたハンド部と、各部を制御する総合コントローラとからなる植物の自動分割システムであって、前記センサ部が植物の形状を計測する第1のステップと、第1のステップの計測結果に基づき前記ロボット部が前記ハンド部を移動させる第2のステップと、前記センサ部が前記ハンド部と植物の相対距離を計測する第3のステップと、前記把持爪が植物と当接するまでハンド部を移動させる第4のステップと、前記ロッドに撓みを生じさせる第5のステップを有することを特徴とする植物の自動分離・植込システム。
(もっと読む)
71 - 75 / 75
[ Back to top ]