
川田工業株式会社により出願された特許
11 - 20 / 57
人型歩行ロボット用脚
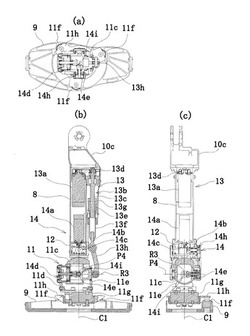
【課題】人型歩行ロボット用脚において、人の脚、特に女性の脚に近いスリムなプロポーションを実現することにある。
【解決手段】下腿8の上部に配置したモータ13aと直線駆動機構13bとをベルト式伝動機構13dで駆動結合し、下腿8下部に配置したモータ14aと下腿8の左右方向へ延在する中間軸14bとをベベルギヤ組14cで駆動結合し、下腿8に軸線P4周りに揺動可能に支持した関節部材11cに足9を軸線R3周りに揺動可能に支持し、軸線R3上に同軸型減速機14dを配置してその出力要素を足9に結合し、関節部材11cの、軸線P4上から外れた部位と直線駆動機構13bの出力要素13fとをリンク部材13hで連結し、関節部材11cの、軸線P4上の位置に回動可能に支持した中間軸14eと、中間軸14bとをベルト式伝動機構14hで駆動結合し、同軸型減速機14dの入力要素と中間軸14eとをベベルギヤ組14iで駆動結合する。
(もっと読む)
長期防錆接合の構造体及びそれに用いるボルトの製造方法並びに施工方法

【課題】鋼材をボルト接合する際にリラクゼーションによる軸力減少を抑えつつ、長期防錆に優れた接合構造体及びそれに用いるボルトの製造方法の提供を目的とする。
また、ボルト締付けによる長期防錆膜の擦れキズを防止するための施工順序(施工方法)の提供を目的とする。
【解決手段】溶射膜を被覆した鋼材を溶融亜鉛めっきしたボルトにて接合した後に当該ボルトに溶射膜を被覆することを特徴とする。
(もっと読む)
吊下げ型協調作業ロボット
【課題】人と共存、協調する作業場所に作業ロボットを投入する場合に、作業場所の近傍の床上の障害物があっても作業ロボットを配置することができ、その作業ロボットを配置した際に作業者の安全を確保することができ、しかも高精度の位置決めも作業命令の大規模な改変も必要としない作業ロボットを提供することにある。
【解決手段】撮像手段と、可動部を逆入力可能に駆動する関節を持つ少なくとも1本の作業腕と、前記作業腕を支持する胴部と、作業場所の天井又は壁に基部を着脱可能に固定されて吊り下げられるとともに先端部で前記胴部と前記撮像手段とを支持する支持部材と、前記撮像手段が撮像した画像に基づき前記作業場所での作業対象物と当該作業ロボットとの相対位置を認識し、その相対位置に基づき前記作業対象物に対する作業を前記作業腕に行わせる作動制御手段と、前記作業が人と共存、協調して行う作業であることを認識すると、前記作業腕の関節を作動させるモータの出力を低下させる出力制御手段と、を具えてなる吊下げ型作業ロボットである。
(もっと読む)
ロボット用可動部支持装置
【課題】逆入力可能な可動部を持つヒューマノイド型ロボットについて、ブレーキによる特別な制動力を必要とせず、関節の非作動状態でその可動部を重力に抗して関節の作動停止時の位置等の所定位置に維持できるようにして、電源を遮断したときの可動部の垂れ下がりを防止することにある。
【解決手段】ヒューマノイド型ロボットの関節11により逆入力可能に駆動される可動部4bを前記関節の非作動状態で所定位置に支持する装置において、前記可動部4bに一端部を連結された索条30と、前記索条の他端部に連結されたスプリング31と、前記可動部と前記スプリングとの間での前記索条の張り渡し位置を規制して、前記関節の非作動状態で前記可動部が重力に抗して所定位置を維持するように前記可動部に前記索条から前記スプリングの弾性力による張力に基づく支持トルクを与える索条ガイド手段32と、を具えることを特徴とするロボット用可動部支持装置である。
(もっと読む)
鉄骨構造物
【課題】鉄骨構造物の梁結合に際し、作業効率の悪化や運搬・保管効率の悪化をもたらす溶接作業を必要としない結合方法が提案されているが、部品数の増加による重量の増加が避けられなかった。
【解決手段】断面がH形に形成された鋼材からなる大梁10と、大梁10の交差方向側方に配置された、断面がH形に形成された鋼材からなる小梁11と、大梁10のウェブ10aの両フランジ10b,10b間に接触するTフランジ取付面12a、及びTフランジ取付面12aに対し交差方向に突出するTウェブ取付面12bを有するT形断面形状に形成されて、Tフランジ取付面12aとTウェブ取付面12bが補強部12cで連結され、Tフランジ取付面12aを大梁10のウェブ10aに、Tウェブ取付面12bを小梁11のウェブ11aに、それぞれボルトB締結により接合したビルトT12とを有する。
(もっと読む)
鉄骨構造物
【課題】鉄骨構造物の梁結合に際し、作業効率の悪化や運搬・保管効率の悪化をもたらす溶接作業を必要としない結合方法が提案されているが、部品数の増加による重量の増加が避けられなかった。
【解決手段】断面がH形に形成された鋼材からなる大梁10と、断面がH形に形成された鋼材からなり、大梁10に重ねて交差方向に配置され重なり合うフランジ10a,11a同士をボルトB締結により接合した小梁11と、大梁10のウェブ10bにボルトB締結により接合したウェブ取付部材14bに一端を、小梁11のフランジ11aにボルトB締結により接合したフランジ取付部材14aに他端を、それぞれボルトB締結により接合した、大梁10の座屈を防止するフランジブレース13とを有する。
(もっと読む)
制動支援装置の安全装置
【課題】 万一の場合には、アクチュエータの制御中にも関わらず緊急制動が可能で、定常走行への迅速な復帰も可能な制動支援装置の安全装置を提供することを目的とする。
【解決手段】 被試験車両のブレーキペダル22にアタッチメント20を介して装着されるアクチュエータ10を操作して前記被試験車両のブレーキ性能の評価を行うための制動支援装置の安全装置において、前記アクチュエータ10とアタッチメント20との間が、所定の踏力以上の力で分離するように構成したことにより、万一の場合には、アクチュエータ10の制御中にも関わらず乗員がブレーキペダル22を強い力で踏むことにより、緊急制動が行われるとともに、アクチュエータ10とアタッチメント20との間が分離されるので、制動支援装置におけるアクチュエータ10の制御とは無関係になったブレーキペダル22を、通常の人力での定常走行制御に迅速に復帰できて安全である。
(もっと読む)
特殊制動支援方法およびその装置
【課題】 テストドライバーの技量差によるバラツキを排除し、複雑かつ特殊な制動を実施することができ、高い評価精度による少ない評価試験回数を実現して評価効率を格段に向上できる特殊制動支援方法およびその装置を提供することを目的とする。
【解決手段】 ブレーキペダル22に装着されたアクチュエータ10を操作して被試験車両のブレーキ性能の評価を行う制動支援方法において、アクチュエータ10にする各センサからの制御部2によるフィードバック信号に基づく制御に加えて、前記アクチュエータ10に対して前記ブレーキ性能の評価項目に対応した油圧による複雑な特殊制御を可能にする制御パターンを予め制御設定部1により設定しておき、テストドライバーによるバラツキに影響されることなく、一定で安定した複雑かつ特殊な制動条件を取り入れた制御パターンを選択して実施でき、高い評価精度により評価効率を格段に向上できる。
(もっと読む)
シート取付機構
【課題】 乗員シート部を含めて試験装置部分の使い回しを可能にする、利便性の高いシート取付機構を提供することを目的とする。
【解決手段】 操作用のペダル22と乗員シート部のベースフレーム32との間にアクチュエータ10を装着し、該アクチュエータ10を操作して前記被試験車両の性能の評価を行う車両において、ベースフレーム32と被試験車両の床面との間を、ベースフレーム32側がベースフレーム32への共通取付面41Aとされ床面側が被試験車両床面への専用取付面41Bとされたアタッチメント41にて接続して、被試験車両毎にアタッチメント41をシート部との間に介設するだけで、試験装置部分の使い回しを可能にするので、低コストのアタッチメント41の準備のみにて、テストドライバーによるバラツキに影響されることなく、一定で安定した制御を可能にする高精度の試験装置を設定できる。
(もっと読む)
ロボット用のプロテクトサポータおよびカバー
【課題】人間と協働するためにデザインされたロボットのためのプロテクトサポータおよびカバーであって、ロボットの外皮構造を軽量かつ安価に構成することができ、同時に高い安全性と取替え容易性、さらに優れた個体識別性および意匠性を呈する、ロボット用のプロテクトサポータおよびカバーを得ることにある。
【解決手段】プロテクトサポータ21〜24は、人間と協働する産業用ロボットの少なくとも関節を覆い、衝撃吸収性および伸縮性を呈する衝撃吸収部を、伸縮性を呈するシート状の表層部で覆った覆帯部を備え、この覆帯部にファスナを取り付けることで着脱可能に構成することを特徴とし、カバー31は、人間の衣服と素材および形態において親和性を呈する、例えば織布あるいは不織布等で形成した胴部および袖部を備えるものとし、着脱可能に構成することを特徴とする。
(もっと読む)
11 - 20 / 57
[ Back to top ]