
Fターム[2B043BA09]の内容
農業機械一般(操向) (6,001) | 車両の種類 (615) | 自律走行車両(学習操向車両) (32)
Fターム[2B043BA09]に分類される特許
21 - 32 / 32
圃場作業車両
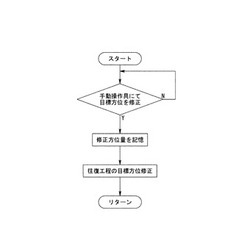
【課題】別途設定による目標方位がずれている場合の修正操作を容易にして、作業性及び作業効率を向上し、簡易な構成で信頼性の高い制御部により自律直進操舵制御が適正に行われる圃場作業車両を提供することにある。
【解決手段】機体方向を示す機体方位情報に基づき、別途設定された往復工程の目標方位に対する機体方位の偏差が小さくなる方向に操向装置の舵角を操作する自律直進操舵制御を行う制御部を備える圃場作業車両において、目標方位を修正する手動操作具を設け、該手動操作具による修正方位量を記憶し、以後の往復工程の目標方位を記憶された修正方位量に基づいて自動修正する圃場作業車両。
(もっと読む)
ソーラー芝刈り機

【課題】太陽電池を用いて、自動芝刈り機構における走行制御手段をコストの低いものとする。
【解決手段】減速装置4を取付けた走行モータ1を車台7に設けてなる走行機構に、刈刃と刈刃駆動モータ3と減速装置6からなる刈刃駆動機構を取り付け、磁気識別センサ11,12を当該車台前端部左右それぞれに設け、当該走行モータ端子の両端それぞれにリレーの接点を接続し、当該リレーのコイル端子と当該磁気識別センサの出力端子を接続し、当該走行モータと当該リレーを介して接続する当該磁気識別センサは当該車台左右反対位置に配置し、太陽電池を当該車台に取付け、当該リレーや当該磁気識別センサからなる走行制御機構と当該走行機構と当該刈刃駆動機構を当該太陽電池に接続し、当該走行機構と当該刈刃駆動機構並びに当該走行制御機構と当該太陽電池13を備える。当該車台を磁気を帯びたもので囲われた場所に配置する。
(もっと読む)
作業車両の自動操縦装置
【課題】 本発明の課題は、手動操縦、自動操縦に関わらず、自動的に切り替えるようにして、従来のような切替操作の煩雑さを解消し、作業能率の向上を図ることにある。
【解決手段】 本発明は、車両(1)の進路を検出するセンサ(21)と、該センサの検出によって車両を操向する操向アクチュエータ(25)を備えた作業車両の自動操縦装置において、前記車両には、操向操作を検出したときには、所定時間に亘り自動操縦を停止し、手動で操縦可能とする制御手段23を備えてあることを特徴とする。
(もっと読む)
作業車の画像処理装置
【課題】 列状に並んだ物体を撮影し、列状に並んだ物体に沿って線分を設定する作業車の画像処理装置において、外乱の影響をできるだけ小さくする。
【解決手段】 撮影データから物体A1,A2の色相を備えた画素を抽出する抽出手段と撮影データにエッジ処理を施して画素を抽出するエッジ処理手段とを備え、抽出手段及びエッジ処理手段の両方の処理を受けて抽出された画素を物体A1,A2に対応する画素として設定、又は、抽出手段及びエッジ処理手段の一方の処理を受けて抽出された画素を物体A1,A2に対応する画素として設定する画素設定手段を備える。物体A1,A2に対応する画素に沿って線分を設定する線分設定手段を備える。
(もっと読む)
圃場作業車両
【課題】簡易な構成で信頼性の高い制御部により自律直進操舵制御の不安定化を回避して異常走行を確実に防止することができる圃場作業車両を提供する。
【解決手段】圃場作業車両1は、機体方向を示す機体方位情報9に基づき、別途設定の目標方位に対する機体方位の偏差が小さくなる方向に操向装置の舵角を操作する自律直進操舵制御を行う制御部21を備えて構成され、上記制御部21には、方位偏差の低減に適する走行速度を基準速度として別途設定し、機体の走行速度情報25に基づいて同走行速度が上記基準速度に満たない範囲について上記自律直進操舵制御を強制解除するものである。
(もっと読む)
作業車の画像処理装置
【課題】 列状に並んだ物体を撮影して線分を設定する作業車の画像処理装置において、物体の色相に近い色相を備えた外乱の影響をできるだけ小さくする。
【解決手段】 物体の並び方向と交差する複数の分割線E1により、画像を複数の領域B1に分割する。領域B1の各々において、物体の色相を備えた画素を候補画素として抽出する。領域B1の各々において、複数の候補画素のうち、最上位から所定個数の候補画素G1,G2,G3,G4を選択する。選択された所定個数の候補画素G1,G2,G3,G4に沿って線分を設定する。
(もっと読む)
田植機の画像処理装置
【課題】 田植機の画像処理装置において、田面に植え付けられた苗と同じような色相を
備えたものが田面に映っても、これを削除(無視)して、田面に植え付けられた苗に相当
する画素を判断することができるように構成する。
【解決手段】 撮影された画像の画素において、赤成分、緑成分及び青成分、彩度Sに基
づいて、田面に植え付けられた苗に相当する画素を判断する。
(もっと読む)
自律機械
自律機械(10)を作業区域の自由表面の実質的に全てを横切るように、作業区域の方々に自律機械をナビゲートするための制御システムを提供する。制御システムは、機械(10)に作業区域の境界を追従させ、複数の移動を実施させるよう構成されており、各移動は、機械(10)が作業区域の境界から境界に対してある角度で外側へ移動して、境界へ再び戻ることを含む。機械(10)は各移動の間に作業区域の境界に沿って移動し、かつ機械(10)が実質的に作業区域の全境界を追従しながらこれらの移動を繰り返す。 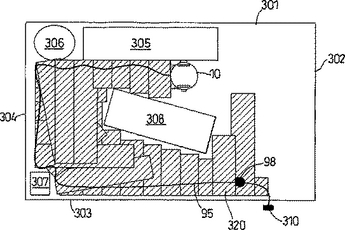 (もっと読む)
(もっと読む)
操向装置
【課題】従来、例えば田植機においては、大容量の電磁クラッチを必要とし、更に、ハンドルシャフト、電磁クラッチ、自動操向用のアクチュエータ等の従来のステアリング系統の構成においては、必ず連続的に上下方向に接続する必要があるため、設計上の自由度が少なかった。
【解決手段】ハンドルシャフト41及びパワーステアリングユニット51が設けられる位置とは異なる位置に、ステアリングギアボックス81を回動させるための油圧モータ71を制御する電磁バルブユニット61を設けた。
(もっと読む)
操向装置
【課題】従来、例えば田植機においては、大容量の電磁クラッチを必要とし、更に、ハンドルシャフト、電磁クラッチ、自動操向用のアクチュエータ等のステアリング系統の構成においては、必ず連続的に上下方向に接続する必要があるため、設計上の自由度が少なかった。
【解決手段】ハンドルシャフト41と、パワーステアリングユニット51と、ステアリングギアボックス81を回動させるための油圧モータ71を制御する電磁バルブユニット61とを連続的に連結し、且つステアリングギヤボックス81と油圧モータ71を連続的に連結して、操向装置を構成した。
(もっと読む)
操向装置
【課題】従来、例えば田植機においては、大容量の電磁クラッチを必要とし、更に、ハンドルシャフト、電磁クラッチ、自動操向用のアクチュエータ等の従来のステアリング系統の構成においては、必ず連続的に上下方向に接続する必要があるため、設計上の自由度が少なかった。
【解決手段】ハンドルシャフトに連結されるパワーステアリングユニット51と車輪の旋回角角度を変化させるステアリングギアとを具備し、ステアリングギアを回動させるための油圧モータ71を設け、該油圧モータ71をパワーステアリングユニット51で制御する。
(もっと読む)
作業車両
【課題】移動局を前輪と後輪の間で、かつ本機の左右略中央に脱着可能に設置する構成の場合は、設置時に移動局を手で持ったままの状態で本機に搭乗しなければならず、更に本機に立設した正面視門型に構成したフレームの横架部に設置しなくてはならないため、設置し辛く、手間がかかっていた。
【解決手段】GPS103のアンテナ1の下部に棒状部材22を脱着可能に取り付け、作業車両101に該棒状部材22を脱着可能に取り付けるための取り付け部2を設けた。
(もっと読む)
21 - 32 / 32
[ Back to top ]