
Fターム[2B043EB18]の内容
農業機械一般(操向) (6,001) | センサの構成、配置又は取付け (441) | センサの構成 (119) | 撮像(カメラ)センサ (20)
Fターム[2B043EB18]に分類される特許
1 - 20 / 20
苗移植機
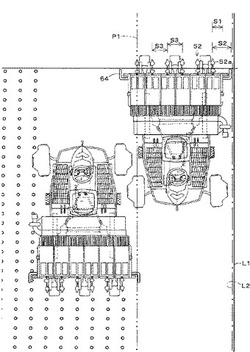
【課題】作業者が目視できない機体後方の苗植付装置とその近傍の情報を操縦席に着席したまま確認できるようにして、正しい圃場位置に苗を植え付けることができる構成を備えた苗移植機を提供すること。
【解決手段】苗を積載する複数条の苗タンク51に苗タンク51と走行車体2後方の情報を検出するCCDカメラ48と、該CCDカメラ48が検出した情報を表示する表示装置16を操縦部33に配置し、カメラ48が検出した情報から苗の植付条列や畦際を制御装置100で判断し、表示装置16に次の植付作業位置を示す第1植付仮想線P1及び圃場と畦際の境界線を示す第1畦際仮想線L1を出力することにより、走行車体2の後方の苗の植付状態や苗タンク51に積載した苗の状態を操縦部33から移動することなく確認することができ、苗の植付姿勢や植付深さの変更を速やかに行えるため、苗の植付姿勢が安定する。
(もっと読む)
走行車両

【課題】旋回後の進入位置合わせを行える自動走行制御機能を備えた農業用の走行車両を提供すること。
【解決手段】ステアリングハンドルに連動して正転と逆転をするステアリングシャフト15の切れ角を検出する切れ角センサ49と該シャフト15に回転駆動力を伝達するための正逆転モータ20とモータ20の回転駆動力をシャフト15に伝達するための電磁クラッチ22を有する連動機構を備えた自動操舵装置25とカメラ53で圃場内の遠目標X及び/又は作業軌跡Tを検出してモニタ47に表示可能とし、自動スイッチの「入」操作時時に、前記切れ角センサ49が所定量のシャフト切れ角を検出して車両の旋回が行われたと判断されると、モニタ47で表示される旋回後の遠目標Xの位置情報及び/又は作業軌跡Tの位置情報に基づき自動操舵装置25のモータ20を作動させて圃場内で直進走行の自動操舵を行う制御構成を有する制御装置100を備えた走行車両である。
(もっと読む)
田植機
【課題】操作者が植付部に苗を補給している間であっても、苗を整列させて植付けることができる田植機を提供する。
【解決手段】CPUは、自動走行スイッチがオンになっている場合に、左右方向において、表示部に表示された線の中央と苗の列との距離を求め、求めた距離に応じた操舵量を演算する。操舵量を演算したCPUは、電磁切換弁201に切換信号を出力する。走行部1は、演算された操舵量だけ右又は左に操舵される。操舵終了後は、電磁切換弁201を中立位置に戻し、走行部を直進させる。
(もっと読む)
田植機
【課題】圃場の環境に左右されることなく、進行方向と苗の並び方向とを確実に整合させることができる田植機を提供する。
【解決手段】左フロントカメラ及び右フロントカメラ21にて圃場に植え付けられた苗を撮像し、撮像された苗を表示部8に表示する。操作者は、表示部8に表示された苗の並び方向を確認して田植機を操舵し、表示部8に表示された線を最も端に位置する苗の列に一致させて、進行方向と苗の並び方向とを整合させることができる構成とした。
(もっと読む)
作業車両の自動走行制御装置
【課題】自動走行による作業に必要な目標の数量を低減出来、その目標の設置の手間も低減出来る作業車両の自動走行制御装置を提供すること。
【解決手段】トラクタ1に設けられたカメラ部8と、カメラ部8により撮像される予め設置された遠目標200の画像情報に基づいて、直進走行を行う遠目標制御処理と、カメラ部8により撮像される作業の痕跡の画像情報に基づいて、倣い走行を行う倣い走行制御処理とを有する、トラクタ1の走行制御を行うカメラ制御部21及び車両制御部23とを備え、カメラ制御部21及び車両制御部23は、遠目標制御処理により直進走行を行わせた後、遠目標制御処理が解除され、トラクタ1が旋回された後、倣い走行制御処理により倣い走行を行わせる、トラクタ1の自動走行制御装置である。
(もっと読む)
水田除草ロボット
【課題】本発明は、水田の稲列の末端で稲列を踏み潰さずにUターン反転することができる、水田の稲列を認識して自走する小型の水田除草ロボットを提供する。
【解決手段】本発明の水田除草ロボットは、2つの矩形の第一台座1及び第二台座2を突き合わせて枢支し、互いに起伏回転可能に連結した台座ユニット3と、前記第一台座1下面に設けた垂直軸(図示省略)に水平回転可能に連結された第一ターンテーブル4と、前記第二台座2下面に設けた垂直軸(図示省略)に水平回転可能に連結された第二ターンテーブル5と、前記第一ターンテーブル4に固定され、クローラ6を備えた第一走行ユニット7と、前記第二ターンテーブル5に固定され、クローラ6を備えた第二走行ユニット8と、前記台座ユニット3上に載置され、図示しないエンジン発電機、制御基板、カメラ、電源装置を内蔵した制御ユニット9とから構成されている。
(もっと読む)
コンバイン
【課題】穀稈の状況に応じた適切な進路を把握でき、刈取作業が行いやすくなるコンバインを提供する。
【解決手段】走行部2と、前記走行部2の前方に配置される刈取部3と、前記刈取部3の後方で前記走行部2の前部上に配置される運転部8とを備えるコンバイン1であって、前記運転部の前方を撮影する第一撮影手段12と、前記第一撮影手段12により撮影された映像を表示する表示装置85と、前記運転部8の操向操作手段(ハンドル82)の操作量に基づいて予測進路軌跡Bを作成する制御装置97とを備え、前記制御装置97は、前記予測進路軌跡Bを前記第一撮影手段12により撮影された映像に重畳させ、この予測進路軌跡Bが重畳された映像を前記表示装置85に表示させる。
(もっと読む)
走行制御装置
【課題】車両が目標ランプに向かって自動的に走行するように制御する走行制御装置を提供する。
【解決手段】走行制御装置において、カメラは、車両走行の目標となる方向に位置する目標ランプを撮像する。画像処理部32は、カメラにより撮像した撮像画像を処理する。走行制御部36は、撮像画像に含まれる目標部画像の位置と車両の初期位置との関係で定まる目標走行ラインを走行するように車両の走行を制御する。ヨー角検出部42は、撮像画像から目標部に対する車両のヨー角を検出する。横偏差算出部50は、撮像画像から目標走行ラインからの横偏差を算出する。走行制御部36は、ヨー角および横偏差にもとづいて車両の走行を制御する。
(もっと読む)
移動車両の直進誘導システム
【課題】運転者の負担を軽減し、熟練者でなくても高能率・高精度な作業ができる移動車両の直進誘導システムを提供する。
【解決手段】この移動車両の直進誘導システムは、移動車両搭載部1、移動車両が直進走行すべき走路前方の延長線上に設置される遠方目標部2を備える。移動車両搭載部1はカメラ部11、カメラ部11からの画像を処理し走行情報を出力する画像処理部12、走行情報に基づき移動車両を制御する車両制御部14,操向制御機構15を有する。遠方目標部2はカメラ部11の撮像周期と最大露光時間の合計時間以上で撮像周期の2倍以下の時間の点灯と消灯とを繰り返す。画像処理部12は現フレームと前フレーム及び、現フレームと前々フレームにおいて第1,第2の遠方目標部候補画素を抽出し、第1,第2の遠方目標部候補画素を統合し、統合した遠方目標部候補画素に対し遠方目標部2の位置検出を行い、検出結果に基づき走行情報を生成する。
(もっと読む)
自動車を操縦するための方法および配置
走行方向で自動車(1)前方にある地面から画像情報が把握され、これらの画像情報から走行方向および/または走行速度を変化させるための操縦命令が作り出される自動車を操縦するための方法を用いて、農業用自動車の画像情報に基づき、目立つ対象構造(3)が選択され、繰り返し自動車(1)と目立つ対象構造(3)との間の距離(a)が求められ、操縦命令が、対象構造に対応する画像情報から、および自動車と対象構造との間の距離変化から、作り出される自動車を操縦する方法。 (もっと読む)
作業機
【課題】 圃面の状況の如何にかかわらず走行基準線を確認しながら作業走行を容易に行い得る作業機を提供する。
【解決手段】 所望の走行方向を指し示す走行基準線Xと、その走行基準線Xに沿って進むべき走行機体の現在位置を示す機体標示73とを表示する液晶表示部69を設け、液晶表示部69を運転操縦部に備えてある。
(もっと読む)
農作業支援機器のための農業用資材と該農業用資材を用いた農地、並びに該農地における農作業支援機器の進行方向認識方法
【課題】各種農作業を支援する機器が、農作業に従事する人に何ら負担を掛けることなく、農地に作られた畝に添って正確に自律走行し、生育した作物の収穫作業支援や農薬散布など、各種農作業を確実に支援できるようにする、農作業支援機器のための農業用資材と該農業用資材を用いた農地、並びに該農地における農作業支援機器の進行方向認識方法を提供することが課題である。
【解決手段】農地に作られた畝を覆うマルチフィルムの、埋設位置内側の長手方向に畝位置認識用の線を設け、農作業支援機器がその畝位置認識用の線を認識することで農地に作られた畝に添って正確に自律走行できるようにした。
(もっと読む)
農薬散布用ホバークラフト
【課題】水田用ホバークラフトが操縦者から遠く離れた位置にあっても、的確に当該水田用ホバークラフトに対する操縦が実施できる極めて操作性が良い農薬散布用ホバークラフトを提供する。
【解決手段】本発明に係る農薬散布用ホバークラフト1は、ホバークラフト本体2に農薬用タンク3と散布装置6を装着し、遠隔操作によって散布装置6及びホバークラフト本体2を操作可能としたラジコンホバークラフトにおいて、ホバークラフト本体2後部に構成されるファンダクト11の上部に、船艇前方の映像をコントローラ21上のモニタ22に写すためのCCDカメラ13及び障害物に対する設定距離以上の接近を感知しコントローラ21上のスピーカ23から警告音を発生させる超音波センサー装置14を設けた。
(もっと読む)
作業車両の自動走行制御装置
【課題】畝W等の走行基準体に沿ったトラクタの自動走行制御の精度を向上する。
【解決手段】トラクタ1には進行方向前側部を撮像するステレオカメラ33を設け、トラクタ1の走行動力を前後進にわたり無段変速する逆転用クラッチ18L,18R及び正転用クラッチ19L,19Rを設ける。ステレオカメラ33により畔等の走行基準体を撮像しながら走行し、走行基準体とトラクタとの検出間隔が所定間隔からずれると、所定間隔に復帰するように正転用クラッチ19L,19Rを作動して操舵制御する。またトラクタ1が所定値以上の加速度を検出すると、所定時間にわたり操舵制御を停止する。
(もっと読む)
作業車の画像処理装置
【課題】 列状に並んだ物体を撮影し、列状に並んだ物体に沿って線分を設定する作業車の画像処理装置において、外乱の影響をできるだけ小さくする。
【解決手段】 撮影データから物体A1,A2の色相を備えた画素を抽出する抽出手段と撮影データにエッジ処理を施して画素を抽出するエッジ処理手段とを備え、抽出手段及びエッジ処理手段の両方の処理を受けて抽出された画素を物体A1,A2に対応する画素として設定、又は、抽出手段及びエッジ処理手段の一方の処理を受けて抽出された画素を物体A1,A2に対応する画素として設定する画素設定手段を備える。物体A1,A2に対応する画素に沿って線分を設定する線分設定手段を備える。
(もっと読む)
乗用型田植機
【課題】 乗用型田植機において、自動走行手段及び人為選択操作具を備えた場合、人為選択操作具の操作により自動走行手段の作動の選択が適切に行われるように構成する。
【解決手段】 前輪1を操向操作可能なアクチュエータ27を備えて、アクチュエータ27を前輪1に機械的に連係させる連係状態及び解除状態に設定自在に構成する。検出手段38の検出に基づいて機体が既に植え付けられた隣の苗列L1に沿って走行するように、アクチュエータ27により前輪1を自動的に操向操作する自動走行手段を備える。人為選択操作具29により自動走行モードが設定されると、アクチュエータ27が連係状態に設定されて自動走行手段が作動し、人為選択操作具29により手動走行モードが設定されると、アクチュエータ27が解除状態に設定される。
(もっと読む)
田植機の画像処理装置
【課題】 田植機の画像処理装置において、田面に植え付けられた苗と同じような色相を
備えたものが田面に映っても、これを削除(無視)して、田面に植え付けられた苗に相当
する画素を判断することができるように構成する。
【解決手段】 撮影された画像の画素において、赤成分、緑成分及び青成分、彩度Sに基
づいて、田面に植え付けられた苗に相当する画素を判断する。
(もっと読む)
コンバイン
【課題】 倒伏穀稈状況における自動方向制御の不安定化。
【解決手段】 左右一対のクローラ3を有する走行装置2と、前記走行装置2の前方に設けた圃場の穀稈を刈取搬送する刈取部5とを有し、該刈取部5は、圃場の株列Kと株列Kの間の株間を各分草体10が通るように、自動方向制御機構Sにより方向修正しながら走行するように構成し、前記自動方向制御機構Sは、前記脱穀装置4あるいはグレンタンク6等の任意の機体後部に設けた後方撮影機材15による撮影した画像により、前記刈取部5が既に切断した穀稈の株列Kを認識し、この株列Kと機体とのずれを検出して方向制御を行うように構成したコンバイン。
(もっと読む)
操向制御方法及び装置
【課題】
視界に入っている一行程前に移植された苗一列全てに対してただ一つの直線を定め、これに対して平行に移植機を走行させる。
【解決手段】
移植機に設けた撮像手段によって既植の苗列を撮像して苗列の画像情報を取得するステップと、該画像情報から苗列領域が抽出された2値画像を取得するステップと、該2値画像を逆透視変換して2値化された苗列領域の仮想地平面画像を取得するステップと、該仮想地平面画像において該苗列領域を直線で近似するステップと、該直線に対する移植機の位置情報に基づいて操向制御を行うステップとを有する。
(もっと読む)
移動作業機の自動化構造
【課題】 高い処理能力を要することなく、高い精度で高速化に対応できる移動作業機の自動化構造を提供する。
【解決手段】 移動作業機1の位置を検出する位置検出手段3と、移動作業機1の作動を制御する制御手段49とを備え、移動作業機1の作業領域A0に複数の制御領域A1〜A8を設定するとともに、各制御領域A1〜A8に対応する複数の制御プログラムを備え、制御手段49が、位置検出手段4の検出に基づいて移動作業機1の各制御領域A1〜A8への到達を検知するのに伴って、到達した制御領域A1〜A8に対応する制御プログラムを実行して移動作業機1の作動を制御するように構成した。
(もっと読む)
1 - 20 / 20
[ Back to top ]