
Fターム[2B043EC19]の内容
農業機械一般(操向) (6,001) | 検出量の伝達又は処理 (391) | 検出量の処理と制御 (323) | 制御設定値又は目標値との比較 (31)
Fターム[2B043EC19]に分類される特許
1 - 20 / 31
走行車両
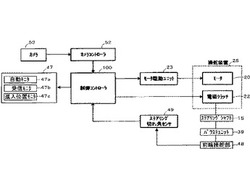
【課題】旋回後の進入位置合わせを行える自動走行制御機能を備えた農業用の走行車両を提供すること。
【解決手段】ステアリングハンドルに連動して正転と逆転をするステアリングシャフト15の切れ角を検出する切れ角センサ49と該シャフト15に回転駆動力を伝達するための正逆転モータ20とモータ20の回転駆動力をシャフト15に伝達するための電磁クラッチ22を有する連動機構を備えた自動操舵装置25とカメラ53で圃場内の遠目標X及び/又は作業軌跡Tを検出してモニタ47に表示可能とし、自動スイッチの「入」操作時時に、前記切れ角センサ49が所定量のシャフト切れ角を検出して車両の旋回が行われたと判断されると、モニタ47で表示される旋回後の遠目標Xの位置情報及び/又は作業軌跡Tの位置情報に基づき自動操舵装置25のモータ20を作動させて圃場内で直進走行の自動操舵を行う制御構成を有する制御装置100を備えた走行車両である。
(もっと読む)
薬剤散布用管理作業車両

【課題】GPSセンサによって得られる機体の移動速度を散布車速として車速連動により所要の面積密度で薬剤を散布する際に、散布走行速度の検出精度について妥当性の判断を可能とする薬剤散布用管理作業車両を提供する。
【解決手段】薬剤散布用管理作業車両は、圃場走行可能に機体を支持する前輪3及び後輪4と、GPS電波を受けて機体位置を検出するGPSセンサS2と、このGPSセンサS2によって得られた機体の移動速度であるGPS車速VGを散布車速として車速連動により散布動作する散布装置Dとを備えて単位面積当たり所定の薬液量で薬剤散布走行が可能に構成され、上記前輪3及び後輪4の走行動作を検出する車速センサS1を設け、この車速センサS1に基づいて前輪3及び後輪4の走行動作と対応する機体の計算車速Vsを算出し、この計算車速Vsと上記GPS車速VGとを区別して表示するモードを設けたものである。
(もっと読む)
乗用型対地作業車両
【課題】乗用型対地作業車両において、車両が傾斜面上を走行する場合でも、運転者が意図する方向への走行を可能とし、さらに、ヨーレートの検出値と目標値との偏差に基づく制御作用時の車両の挙動特性を自由に設定しやすくすることである。
【解決手段】乗用型対地作業車両である芝刈車両10は、コントローラ48と、車両のヨーレートを検出するヨーレートセンサ60とを備える。コントローラ48は、運転者により入力される加速指示及び旋回指示に基づいて左右車輪用電動モータ22,24それぞれの2の目標回転速度指令値を算出し、目標ヨーレートとヨーレート検出値との偏差に基づいて、車輪用電動モータ22,24にそれぞれ関係する2の補正係数を取得し、2の目標回転速度指令値のそれぞれを2の補正係数により補正して、車輪用電動モータ22,24の駆動を制御する。
(もっと読む)
走行制御装置
【課題】車両が目標ランプに向かって自動的に走行するように制御する走行制御装置を提供する。
【解決手段】走行制御装置において、カメラは、車両走行の目標となる方向に位置する目標ランプを撮像する。画像処理部32は、カメラにより撮像した撮像画像を処理する。走行制御部36は、撮像画像に含まれる目標部画像の位置と車両の初期位置との関係で定まる目標走行ラインを走行するように車両の走行を制御する。ヨー角検出部42は、撮像画像から目標部に対する車両のヨー角を検出する。横偏差算出部50は、撮像画像から目標走行ラインからの横偏差を算出する。走行制御部36は、ヨー角および横偏差にもとづいて車両の走行を制御する。
(もっと読む)
走行車両
【課題】走行機体に搭載されたエンジンの動力を変速する直進用及び旋回用変速機53,54と、直進用変速機53に対する直進操作具と、旋回用変速機54の旋回操作具とを備えている走行車両において、操作系統の簡素化及び操作性の向上を図る。
【解決手段】互いに直交する旋回軸線及び変速軸線回りに回動可能な制御体を備える。旋回操作具の操作に伴う制御体の旋回軸線回りの正逆回動にて旋回用変速機54を作動させる一方、直進操作具の操作に伴う制御体の変速軸線回りの正逆回動にて直進用変速機53を作動させるように構成する。制御体は、各変速機53,54からの出力を左右の走行部に伝達するミッションケース18に内蔵する。
(もっと読む)
自律走行苗移植機
【課題】本発明では、野菜苗等のポット苗を自律走行しながら畝に移植する苗移植機で、畝上を走行しながら畝の終端に達すると反転して隣の畝に移動して苗の移植を継続できるようにする自律走行苗移植機を提供することが課題である。
【解決手段】走行機体13の底部に畝Uの上面に接触して畝Uを検出する畝センサ28を設け、該畝センサ28が畝Uの終端を検出するとUターン制御を開始して隣の畝Uに移動すべく制御して自律走行苗移植機を構成した。
(もっと読む)
全自動苗移植システム
【課題】本発明では、野菜苗等を自律走行しながら畝に植え付ける苗移植機で、この苗移植機に搭載した移植苗が無くなると自動で苗トレイを補給しながら移植作業を継続できるようにする全自動苗移植システムを提供することが課題である。
【解決手段】走行機体13の前側或は後側に苗トレイTを受け取る苗補給装置18を設けた自律走行の自動苗移植機1と苗トレイTを多数搭載する自律走行の自動苗搬送機40を設けると共に、これら自動苗移植機1と自動苗搬送機40を制御する統合制御装置55を設け、自動苗移植機1に搭載の苗が無くなるか少なくなると自動苗移植機1と自動苗搬送機40を互いに接近させて前記苗補給装置18で自動苗搬送機40から苗トレイTを受け取り、苗の移植走行を続行すべく前記統合制御装置55で制御した全自動苗移植制御システムとした。
(もっと読む)
走行車両
【課題】四輪自動車と同じような操作感覚で運転(操縦)可能なコンバイン等の走行車両において、主変速レバーと操向ハンドルとを直進用及び旋回用HST機構に連動連結するための機構を簡素化する。
【解決手段】互いに直交する2つの軸線回りに回動可能な単一の制御体を収容ボックスに内蔵する。制御体は、操向ハンドルの操作にて縦軸線回りに回動し、且つ、主変速レバーの操作にて横軸線回りに回動するように構成する。収容ボックスには、旋回用変換軸と直進用変換軸とを、互いの軸線が実質的に同一平面上に位置した状態で回動可能に軸支する。更に、各変換軸の回動量を検出する回動角センサ140,180と、各HST機構の制御軸に関連させた電動モータ141,181と、各回動角センサ140,180の検出情報を用いて各電動モータ141,181を駆動させるコントローラ200とを備える。
(もっと読む)
作業車の走行制御装置
【課題】 GPS位置情報算出手段やジャイロ装置の検出状態が適正であるか否かを外部から識別可能にして、極力煩わしさの少ない状態で監視することが可能となる作業車の走行制御装置を提供する。
【解決手段】 GPS位置情報算出手段100にて求められる車体の位置情報及びジャイロ装置57にて検出される車体の方位変位情報がいずれも適正に検出されている適正検出状態であるか少なくともいずれか一方が適正に得られていない不適正検出状態であるかを判別する検出状態判別手段103と、前記適正検出状態であることが判別されているときと前記不適正検出状態であることが判別されているときとで表示内容を異ならせる形態で、且つ、車体外方から表示内容を目視可能な状態で判別結果を表示する判別状態表示手段78とが備えられる。
(もっと読む)
作業車の走行制御装置
【課題】 GPS位置情報算出手段により求められる車体の位置情報を有効に利用することで、低コストのジャイロ装置を用いてコスト低減を図ることを可能にしながらも、設定経路に沿う操向制御を極力良好に行えるようにする。
【解決手段】 車体の位置情報を求めるGPS位置情報算出手段100、車体の方位変位情報を検出するジャイロ装置57、ジャイロ装置57にて車体の方位変位情報が適正に検出されているジャイロ情報適正状態であるか適正に検出されていないジャイロ情報不適正状態であるかを判別するジャイロ情報判別手段103が備えられ、ジャイロ情報適正状態であることが検出されると、GPS位置情報算出手段100による車体の位置情報及びジャイロ装置57による車体の方位変位情報に基づいて操向制御し、且つ、ジャイロ情報不適正状態であることが検出されると、GPS位置情報算出手段100による車体の位置情報のみに基づいて操向制御する。
(もっと読む)
刈取収穫機
【課題】 機体を自動操向操作により走行させながら植立茎稈の刈取作業を行うことが可能でありながら、植立茎稈の刈残し等が発生しない良好な状態で且つ能率よく刈取作業を行うことが可能となる刈取収穫機を提供する。
【解決手段】 対地位置検出手段にて求められる機体の対地位置情報に基づいて機体が作業対象領域内の設定経路に沿って走行するように、機体の向きを変更操作自在な操向操作手段29を制御する制御手段Hが備えられ、その制御手段Hが、設定経路における植立茎稈を刈り取る刈取用経路部分を走行するときに、対茎稈位置検出手段83にて検出される植立茎稈に対する機体の横幅方向の位置が刈取用の適正位置から外れると、対地位置検出手段の検出情報にかかわらず、対茎稈位置検出手段83の検出情報に基づいて機体の横幅方向の位置が適正位置になるように操向操作手段29を制御する。
(もっと読む)
作業車
【課題】直進状態と旋回状態とに切り換え自在な操向手段を備えて、直線状の作業経路に沿って走行する直進走行と前記直線状の作業経路の終端部から次回の直線状の作業経路に向けて予め定めた設定走行パターンにて走行する経路変更用走行とを繰り返す形態で作業を行う作業車に関する。
【解決手段】作業経路変更用走行を自動で行うように前記操向手段101を切り換え制御する作業行程切換制御を実行する自動旋回制御手段102と、前記作業経路変更用走行の開始を指令する手動操作式の自動旋回指令手段SWとが備えられ、前記自動旋回制御手段102が、前記自動旋回指令手段SWの指令に基づいて前記作業行程切換制御を実行するように構成する。
(もっと読む)
動的限定的ステアリングフィードバック
【課題】 運転制御が容易な芝維持車、そのための動的限定的ステアリングフィードバックシステム、および芝維持車の制御方法を提供する。
【解決手段】 芝維持車用の動的限定的フィードバックシステムが、芝維持車のステアリング角および/または対地速度を検出する入力装置を含む。入力装置は、芝維持車のステアリング角および/または対地速度に相互関連する入力信号を送信する。本システムはまた、芝維持車のステアリング抵抗、旋回比、速度制限、対地速度および/または旋回角制限に影響を及ぼす出力装置を含む。本システムはさらに、入力信号を受信し、かつ入力信号に基づいて出力装置に制御信号を出力するコントローラを含み、入力信号に基づいて、芝維持車のステアリング抵抗、旋回比、速度制限、対地速度および/または旋回角制限を変化させる。芝維持車の制御方法も開示される。
(もっと読む)
乗用型作業機
【課題】8条植えなどの多条植え用であっても適切な位置で苗の植え付けができる旋回連動制御装置を備えた乗用型作業機を提供すること。
【解決手段】作業装置4を連結した走行車体2に走行距離を検出する走行距離検出手段205を設け、旋回時の走行距離が所定値に達したら、ブザー186が鳴って走行車体2の操向用のハンドル34を例えば90度旋回操作させる、さらに走行距離が所定値に達したら、ブザー186をもう一度鳴らして走行車体2の操向用のハンドル34を、再び例えば90度旋回操作させることができるようにすると、オペレータの操向操作の目安になり、所望の走行経路で旋回でき、8条植えなどの多条植え用の乗用型作業機であっても、前回の植付条に一部重なった状態で苗の植え付けをするおそれなく圃場での旋回が可能となる。
(もっと読む)
トラクタ
【課題】トラクタに装着した作業機を、旋回操作に関連して自動的に昇降する作業機自動昇降制御装置は、旋回操作が終了したことが検出されると、自動下降機構が働いて作業機を自動的に下降するから、操作の手間が省けて便利である反面、危険性の伴う課題がある。
【解決手段】この発明は、トラクタに昇降自由に作業機が設けられ、前輪の切れ角が設定値以上になったとき、前記作業機を上昇する自動上昇機構が設けられ、前記前輪の切れ角が設定値未満になると、前記作業機を下降する自動下降機構が設けられている旋回時のトラクタにおいて、上昇移動が手動操作によって行われた作業機は、旋回操作の終了が判断された後であっても、自動下降機構による自動下降ができない構成としたトラクタの構成とする。
(もっと読む)
作業車両の動力伝動機構
【課題】走行機体のスムーズな左右旋回を可能にする作業車両の動力伝動機構を提供することを課題とする。
【解決手段】走行機体2の左右の走行部1毎に設けられた車軸19と、車軸19毎に設けられ動力を車軸19に伝動する遊星歯車機構18と、速度変更機構とを備え、前記速度変更機構により左右の走行部1に速度差を生じさせて走行機体2を左右旋回させる作業車両の動力伝動機構において、遊星歯車機構18が入力軸17と、出力軸21と、遊星ギヤ24と、該遊星ギヤ24を支持するキャリア26とを備え、速度変更機構25が、前記キャリア26を固定状態から固定解除状態にすることにより入力軸17の動力を減速させて出力軸21に伝動する第一クラッチAと、前記キャリア26を出力軸21側への連結状態から連結解除状態にすることにより入力軸17の動力を減速させて出力軸21に伝動する第二クラッチBとの少なくとも一方を備えている。
(もっと読む)
農用作業車
【課題】自律走行を行う農用作業車において、オペレータが現在の機体位置の情報(即ち、機体位置が目標経路または目標方向に合致しているか否か、または、目標経路と合致していない場合には機体のズレ方向)を容易に知ることができる技術を提供する。
【解決手段】目標経路の生成後において、該目標経路に対する田植機1の機体位置の変位方向を表示し、かつ、田植機1が自律走行可能か否かを表示する自律走行位置表示ランプ45を具備する構成とする。
(もっと読む)
農用作業車
【課題】GPSにより車体位置を計測しつつ、自律的に直進走行する農用作業車において、ティーチング経路を折れ線状や曲線状に生成することを可能とする技術を提供する。
【解決手段】GPSユニット102と、処理部110を備え、目標経路上を自律的に走行する田植機1であって、GPSユニット102により計測される位置情報に基づいて、ティーチング開始時から終了時まで、田植機1の車体位置を所定の間隔ごとに測定して、複数の車体位置(測定点Aから点G)を記録し、該記録に基づいて、走行した前後二つの測定点を直線で結ぶ線分の集合として、処理部110によりティーチング経路を生成し、該ティーチング経路に対して平行な目標経路を生成し、該平行な目標経路の線間距離は作業幅(即ち、植付幅aに植付条数bを乗じた距離(6a))とする。
(もっと読む)
農用作業車
【課題】自律的に直進走行する農用作業車において、次工程への遷移時に走行経路の位置決めが容易にでき、かつ、目標経路と実際の走行経路を略一致させることができる技術を提供する。
【解決手段】GPSユニット102と処理部110を備え、GPSユニット102により計測される位置情報に基づいて処理部110によりティーチング経路を生成し、該ティーチング経路に沿って自律走行させるようにした田植機1において、ティーチング開始点(点A)とティーチング終了点(点B)をGPSユニット102により計測し、処理部110により、点Aと点Bを結ぶ直線状のティーチング経路(線分AB)を生成し、かつ、線分ABと、車体に装着した植付部4において設定する作業幅(即ち、植付幅aに植付条数bを乗じた距離)を基準として、線分ABに対して平行で、作業幅だけ離間したN本の直線状の目標経路を生成する。
(もっと読む)
作業車用制御装置
【課題】大廻り旋回についての確実な事前判定により、自動旋回制御に反映して大廻り旋回の影響を小さく抑えることができる作業車用制御装置を提供する。
【解決手段】作業車用制御装置は、旋回走行中の走行車輪の転動量に基づいて旋回行程の所定の基準位置nによる作業機動作制御を行う制御処理部21を備えて構成され、上記制御処理部21は、走行車輪の左右回転速度差が所定の基準値より小なる場合に、上記基準位置nを所定の補正処理した補正基準位置により作業機動作制御を行うように構成したものである。
(もっと読む)
1 - 20 / 31
[ Back to top ]