
Fターム[2B063CA07]の内容
移植機(田植機の接地部) (1,596) | 連動制御 (163) | 自動昇降制御 (150) | アクチュエータ作動制御 (10)
Fターム[2B063CA07]に分類される特許
1 - 10 / 10
田植機
【課題】植付部の上昇をともなうことなく植付部の駆動を停止させることができ、圃場面に苗を植え付ける植付作業の作業性の向上を図った田植機を提供する。
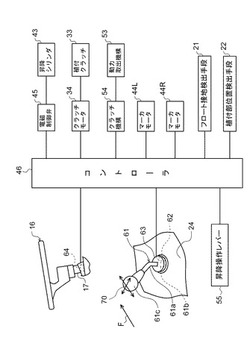
【解決手段】植付部3の昇降を切り替える昇降シリンダ43と、植付クラッチ33の入切を切り替えるクラッチモータ34と、植付部3の下部に設けたセンターフロート38の接地を検出するフロート接地検出手段21と、クロスレバー61の操作を検出するレバー位置センサー62と、植付部3の昇降と植付クラッチ33の入切を制御するコントローラ46とを備え、クロスレバー61は中央を中立位置とし、少なくとも2方向に操作可能な中央復帰型スイッチで構成し、コントローラ46はセンターフロート39の接地が検出され、且つ植付クラッチ33がON状態のとき、クロスレバー61が1回上昇操作されると昇降シリンダ43を作動させず、クラッチモータ34を作動させて植付クラッチ33をOFF状態にする。
(もっと読む)
苗移植機

【課題】
畦際の旋回痕を整地ロータで充分に均し、圃場均平用フロートで均平にすることで、畦際での苗の植付深さを揃える苗移植機を提供することにある。
【解決手段】
走行車体2の後部に整地ロータ27とフロート55,56と苗植付装置52を設けた苗植機において、左右の整地ロータ27a,27bをそれぞれ独立昇降自在に構成し、畦際での植付作業を検出する畦際検出部材SAを設け、畦際検出部材SAで検出した畦側の整地ロータ27a,27bを反対側の整地ロータ27a,27bよりも下方へ降下させ、畦際検出部材SAを、左右の畦クラッチレバー71,71の操作を検知する左右の畦クラッチスイッチ71a,71bで構成し、左右の畦クラッチスイッチ71a,71bを操作すると左右の整地ロータ27a,27bのいずれか一方を下方に下降させる構成とする。
(もっと読む)
乗用田植機
【課題】 本発明の課題は、圃場に適した整地作業をできるようにすることである。
【解決手段】 走行車体の後側に昇降用リンク装置を介して苗植付装置を連結し、苗植付装置から前方に突出するアームを介して左右方向の均平ロータリ軸回りに回転して対地作業を行う均平ロータリを走行車体の後方に設けた乗用田植機において、苗植付装置に設けたセンターフロートの上下動を検出する上下動検出機構を設け、均平ロータリを上下調節する均平装置上下調節モータを設け、上下動検出機構の検出に基づいて均平装置上下調節モータの作動目標値を補正すると共に、均平装置上下調節モータへ出力して均平ロータリを昇降制御する制御部を設けた。
(もっと読む)
苗移植機
【課題】 本発明の課題は、接地検出センサとして、地表面に接触することにより発生する歪、衝撃が検出できる圧電セラミックス素子を用いることによって、低コストで地表面の変化を的確に検出でき、シンプルな制御が可能な制御手段を具現することにある。
【解決手段】 本発明は、苗植付部(2)の前側に地表面を整地する整地ロータ(4)を備えてある苗移植機において、圃場の地表面に対する接触により発生する歪、衝撃が検出できる圧電セラミックスプレートからなる接触検出センサ(3)を苗植付部(2)の適所に配置して設け、該接地検出センサ(3)は、この接地面が地表面に沿うように対設すると共に、地表面の変化検出結果に基づき苗植付部の植付姿勢を自動制御する。
(もっと読む)
田植機
【課題】駆動用アクチュエータにより整地装置を駆動する田植機を提供する。
【解決手段】
走行部の後方に植付部を昇降自在に連結し、同植付部の前方に整地装置を取り付けた田植機において、整地装置は、左右方向に伸延する回転軸と、同回転軸の外周に同心的に取り付けた整地ローターとを具備し、上記回転軸に駆動用のアクチュエータを連動連設して、同アクチュエータにより回転軸を介して整地ローターの回転速度を可変となしている。
(もっと読む)
田植機
【課題】駆動用アクチュエータにより整地装置を駆動する田植機を提供する。
【解決手段】
走行部の後方に植付部を昇降自在に連結し、同植付部の前方に整地装置を取り付けた田植機において、整地装置は、左右方向に伸延させて駆動用のアクチュエータを連動連設した回転軸と、同回転軸の外周に同心的に取り付けた整地ローターとを具備すると共に、整地ローターを植付圃場を整地する整地対象面に接地させた整地作業位置と、同整地ローターを前記整地対象面から上方に離隔した非整地作業位置との間で昇降させるようにし、整地作業時のアクチュエータの負荷を検出可能として、同検出負荷に応じて整地ローターの位置を昇降変更させるようにしている。
(もっと読む)
移植機
【課題】整地作業機の高さ調節に関し、オペレータの操作負担を軽減すると共に、整地作業機の高さを適正化して整地作業精度を向上させる。
【解決手段】走行機体1に昇降自在に連結され、苗の植付けを行う植付作業機10と、植付作業機10の前部に昇降自在に連結され、植付作業機10の前方で整地を行う整地作業機17と、整地作業機17を植付作業機10に対して昇降させるロータ昇降モータ52と、整地作業機17の高さを設定操作するロータ高さ設定ダイヤル54と、ロータ高さ設定ダイヤル54の操作に応じたロータ昇降モータ52の駆動制御にもとづいて整地作業機17の高さを制御する制御部21とを備える乗用田植機において、制御部21は、ロータ高さ設定ダイヤル54とは異なる所定の操作具操作に応じて、整地作業機17の高さを所定方向に微調節する。
(もっと読む)
走行車両
【課題】旋回時の旋回半径を従来より小さくして旋回性と作業性を高めて農作業機を提供すること。
【解決手段】走行車両1のハンドル16をある一定角度以上旋回方向に切った時に、旋回外側後輪7の負荷が小さくても旋回時外側の後輪7だけ下降するように、旋回外側の油圧シリンダ92による伝動ケース24の押圧力を旋回内側となる後輪7側の油圧シリンダ24による伝動ケースの押圧力より強くするので、旋回外側後輪7側の車高が高くなり、旋回半径がより小さくなるので旋回性能が優れた農作業機が得られる。
(もっと読む)
農用作業車の制御装置
【課題】枕地での作業精度を向上させる。
【解決手段】旋回走行しうる走行機体に対して昇降可能な作業装置を設け、走行機体には作業装置の非作業位置への上昇及び作業位置への下降の各動作を旋回走行過程における所定のタイミングで行なう自動旋回制御装置を備える。作業装置にはフロートを備えて、フロートの接地により圃場面を均平整地可能に構成し、フロートの接地走行時には作業装置を所定の対地高さとなるように昇降制御可能に構成する。この昇降制御装置の制御感度が所定値より鈍感側に設定されると、前記自動旋回制御装置の実行を停止する。
(もっと読む)
苗移植機
【課題】圃場における適正な整地作業の実現をはかり、整地装置にかかる負荷を低減し、経済的で、作業効率の良い苗移植機を提供することである。
【解決手段】走行車体10の後ろ側にある苗植付部20は前後にピッチング動可能であり、苗植付部20の前側には整地装置22を取り付けている。更に整地装置22は苗植付部20と共に前後にピッチング動するように苗植付部20と連結して支持されている。
苗植付部20に対して整地装置22を上下動させる上下動装置23を設け、苗植付部20が前方へ傾きながらピッチング動するのに連動させて、整地装置22を上昇させる構成とした。
(もっと読む)
1 - 10 / 10
[ Back to top ]