
Fターム[2B076BB06]の内容
収穫機本体(機枠、駆動) (12,770) | 機体構造 (442) | 機台に対する機体の位置変化 (105) | 前後傾動 (24)
Fターム[2B076BB06]に分類される特許
1 - 20 / 24
走行車両
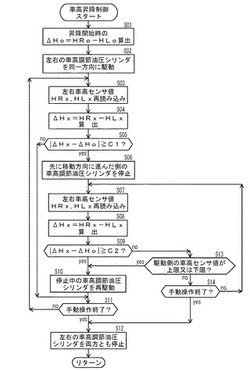
【課題】手動操作によって走行機体の車高を昇降させる場合において、左右のローリングアクチュエータにかかる負荷の大小に拘らず、走行機体の左右傾斜角度をできるだけ一定に維持した状態で、走行機体の車高を昇降できるようにする。
【解決手段】現時点の左右の車高センサ375,376値の差ΔHxと昇降開始時の左右の車高センサ375,376値の差ΔHoとの間の差分の絶対値|ΔHx−ΔHo|が予め設定された第1昇降基準値C1を上回ると、先に移動方向に進んだ側のローリングアクチュエータ38を停止させ、他方のローリングアクチュエータ38の駆動を継続させる。
(もっと読む)
走行車両

【課題】ローリングアクチュエータやピッチングアクチュエータを可動限界まで動作させて走行機体にねじれを生じさせたり、走行機体を極端な姿勢にしたりすることがなく、安定した姿勢制御を実現できる走行車両を提供する。
【解決手段】本願発明の走行車両は、左右の走行部2にて支持された走行機体1と、走行機体1の左右方向の傾斜姿勢を変更するローリングアクチュエータ38と、走行機体1の前後方向の傾斜姿勢を変更するピッチングアクチュエータ177と、各アクチュエータ38,177の駆動を制御するコントローラ371とを備える。コントローラ371には、走行機体1における各走行部2側の姿勢に関する一対の姿勢データML,MRを格納する。コントローラ371は、各アクチュエータ38,177による走行機体1の姿勢変更の可否を両姿勢データML,MRに基づき決定する。
(もっと読む)
コンバインの姿勢制御装置
【課題】本発明は、機体の水平制御に用いられる油圧シリンダを含む機構を機体に対してコンパクトに配置するコンバインの姿勢制御装置を提供する。
【解決手段】機体フレーム2において機体左右方向に配置される軸部17,22に、当該軸部17,22周りに回動しトラックフレーム10を昇降操作する昇降アーム19,24,26と、軸部17,22を回動させて昇降アーム19,24,26を操作する操作アーム18,23とを機体前後のうちの同方向に取り付け、軸部17,22から同方向への操作アーム18,23の長さF1,R1を軸部17,22から同方向への昇降アーム19,24,26の長さF2,R2以下に設定するとともに、操作アーム18,23と機体フレーム2に亘ってピストンロッド28a,29aを下方に出退させて操作アーム18,23を軸部17,22周りに回動させる油圧シリンダ28,29を鉛直方向に配置した。
(もっと読む)
汎用コンバインの油圧回路
【課題】走行負荷が増大して作動油量が不足しても、収穫作業に必要なリール昇降シリンダ及びセカンドモア昇降シリンダの機能を確保し、収穫作業の能率を高める。
【解決手段】油圧ポンプ(51)から吐出される圧油を、複数の油圧クラッチ(57,58,59,60)を制御する走行油圧回路(54)と刈取部(4)昇降用の刈取シリンダ(61)を制御する刈取油圧回路(55)に供給し、該走行油圧回路(54)と刈取油圧回路(55)のうちのいずれか一方の油圧回路を経て供給される圧油をプライオリティ型分流弁(62)で分流して、リール昇降シリンダ(14)及びセカンドモア昇降シリンダ(66)を備えた機体前部油圧回路(64)に一定流量の圧油を供給し、残りの余剰圧油をローリングシリンダ(68,69)とピッチングシリンダ(70)を備えた機体油圧回路(56)に供給する構成とする。
(もっと読む)
コンバイン
【課題】刈取部が地上面に突っ込んで損傷等されるという不具合の発生を回避すること。
【解決手段】左右一対の走行部間に昇降自在に架設した機体本体と、機体本体の前端部に昇降自在に取り付けた刈取部とを備えたコンバインにおいて、機体本体に設けた作業部のクラッチを切断させる作業終了操作と、機体本体を設定位置まで下降させる下降復帰制御と、刈取部を地上面に接地させないように地上高を制御する地上高制御とを連動させた。作業部のクラッチを切断させる作業終了操作を行うと、機体本体を設定位置(例えば、最下位置)まで下降させる下降復帰制御がなされるとともに、刈取部を地上面に接地させないように地上高を制御する地上高制御がなされる。
(もっと読む)
コンバイン
【課題】走行機体1の左右又は前後の傾斜角度の初期設定基準値(機体水平値)を簡単に認識でき、走行機体1の左右方向又は前後方向の傾斜姿勢を、走行状況等に対処して俊敏に変更できるように従来技術を改良した走行車両を提供するものである。
【解決手段】エンジン14が搭載された走行機体1に、左右又は前後の複数本の油圧シリンダ38又は177を介して、左右の走行部2を設け、走行機体1の左右及び前後の傾斜角度を変更させるコンバインにおいて、走行機体1の左右又は前後の傾斜角度の少なくともいずれか一方が初期設定基準値(機体水平値)に戻ったときに、油圧シリンダ38又は177を一旦停止させるように構成したものである。
(もっと読む)
走行車両
【課題】走行機体1とトラックフレーム21の支持構造の耐久性を向上できるものでありながら、ピッチングアクチュエータ177の制御によって走行機体1の前後方向の傾斜姿勢を簡単に変更できるようにした走行車両を提供するものである。
【解決手段】左右の走行部2を有する走行機体1と、走行機体1の左右方向の傾斜姿勢を修正するローリングアクチュエータ38と、走行機体1の前後方向の傾斜姿勢を修正するピッチングアクチュエータ177を備え、左右のトラックフレーム21に左右のリンク機構R1,P1を介して走行機体1を昇降可能に搭載し、走行機体1の左右方向の傾斜姿勢と、走行機体1の前後方向の傾斜姿勢を修正可能に構成した走行車両において、リンク機構R1,P1は、平行リンク状の前側アーム33及び後側アーム34を有する構造であって、トラックフレーム21にピッチングリンク175を介して前側アーム33又は後側アーム34のいずれか一方を連結したものである。
(もっと読む)
走行車両
【課題】ピッチングアクチュエータの耐久性を向上でき、ピッチングアクチュエータをコンパクトに配置でき、走行機体等を簡単に構成できるようにしたコンバインを提供する。
【解決手段】左右の走行部としての走行クローラ2を有する走行機体1と、走行機体1の左右方向の傾斜姿勢を修正するローリングアクチュエータ38と、走行機体1の前後方向の傾斜姿勢を修正するピッチングアクチュエータ177を備えた走行車両において、ローリングアクチュエータ38と、ピッチングアクチュエータ177を、平面視で一列状に配置したものである。
(もっと読む)
走行車両
【課題】手動車高調節ダイヤルの誤操作に対する配慮がなされた車高制御装置を備えた走行車両を提供する。
【解決手段】左右の走行装置と走行車体との間に左右の車高調節シリンダを介して走行車体を昇降制御してなる走行車両において、左右の走行装置に対する走行車体の高さを左右各別に検出する車高左位置センサ及び車高右位置センサと、走行車体の高さを任意に調節可能な手動車高調節手段と、手動車高調節手段が、初期位置から所定量以上の車高変化量に相当する操作量で機体を上昇させる側又は下降させる側に操作された場合に、車高調節シリンダを伸縮させて車高を下降又は上昇させる制御出力を行う車高制御装置を備える。
(もっと読む)
コンバイン
【課題】刈取装置3の駆動機構(刈取入力ベルト機構)を簡単に構成できるものでありながら、刈取装置3や脱穀装置5に対するメンテナンス作業性を向上できるようにしたコンバインを提供するものである。
【解決手段】刈取装置3を横軸4a回りに回動させて昇降動可能に構成する一方、刈取装置3を縦軸150回りに回動させることによって刈取装置3が横移動するように構成してなるコンバインにおいて、ミッションケース26からの刈取駆動力を伝達する機体側入力軸178が走行機体1に配置され、刈取装置3に刈取駆動力を伝達する移動側入力軸45が刈取装置3に配置され、刈取装置3が縦軸150回りに横移動することによって係脱するギヤ機構185を介して、機体側入力軸178に移動側入力軸45が連結される構造であって、ミッションケース26内に、刈取装置3の駆動速度を切換えるPTO変速機構110と、所定の一定回転速度で刈取装置3を作動させるPTO一定回転機構111とを配置したものである。
(もっと読む)
コンバインのピッチング制御装置
【課題】圃場コーナー等における切り返し操作による後進直後においても、刈取部の簡易な高さ調節操作によって迅速な刈取作業の再開を可能とするコンバインのピッチング制御装置を提供する。
【解決手段】コンバインのピッチング制御装置は、 刈取部(9)を前端に備えた車体とこの車体を走行支持するために前後進および旋回走行が可能な左右のクローラ(7)による走行部との間に介設され、上記車体の前後方向の傾斜を変更調節する姿勢調節部(27)について、その前後傾斜を水平制御によって水平位置まで修正する制御部によって構成され、この制御部は、機体の旋回動作に付帯する変化に基づき、その開始から復帰までの間について傾斜角度を維持する傾斜固定制御を行うように制御処理を構成したものである。
(もっと読む)
作業車の姿勢制御装置
【課題】機体本体の傾斜角の変更操作を適切に行うことができる作業車の姿勢制御装置を提供する。
【解決手段】機体本体の左右傾斜角及び前後傾斜角を変更操作自在な姿勢変更操作手段が、機体本体における左側前部、左側後部、右側前部、及び、右側後部の夫々において走行装置の接地部に対する高さを各別に変更調節自在な4個の駆動手段を備え、姿勢制御手段が、4個の駆動手段のうちの2個の駆動手段を駆動停止させた状態で、且つ、その駆動停止させた2個の駆動手段夫々の走行装置の接地部に対する各高さ位置を含む基準平面KHを設定して、他の2個の駆動手段を基準平面KHからの各操作量が同じになるように駆動操作することにより、4個の駆動手段の走行装置の接地部に対する各高さ位置にて平面を形成する状態を維持させる平面維持姿勢変更作動を実行するように構成されている。
(もっと読む)
クローラ走行装置
【課題】左右ローリング調節やピッチング調節可能で、かつ路面又は圃場の凹凸に対するクローラベルトの接地性を向上させることができるように構成しても、機体フレームやクローラ走行装置が破損し難いクローラ走行装置を実現する。
【解決手段】トラックフレーム21の後部の支点P周りに、天秤状に上下揺動可能な揺動トラックフレーム24を連結支持してあるクローラ走行装置1において、前部及び後部揺動機構8,9を操作し、機体フレーム7に対してトラックフレーム21の前部及び後部がそれぞれ下方及び上方へ揺動した前下がり姿勢において、トラックフレーム21に対して揺動トラックフレーム24の前部及び後部がそれぞれ下方及び上方へ揺動した前下がり揺動の揺動範囲を制限する揺動制限機構Aを備える。
(もっと読む)
コンバインの運転操作部
【課題】前後の操作レバーを狭いスペースに効率よく配置する。
【解決手段】前後方向に連続する上下の段部140にそれぞれ操作レバーを上方へ突出するように備えたコンバイン1の運転操作部15で、下側段部140aに前操作レバー124を前後方向に回動操作可能に配置し、該前操作レバーの後上方の上側段部140bに後操作レバー101を上下方向に回動操作可能に配置し、該後操作レバーの下最大操作位置が、前操作レバーの後最大操作位置の左右一側の側方となるように構成した。
(もっと読む)
作業車の姿勢制御装置
【課題】 走行装置に対する車体の姿勢が大きく変化するおそれが少ない場合には車体の姿勢変更速度を遅くして乗り心地が低下することを防止しながらも、走行装置に対する車体の姿勢が大きく変化するような場合には迅速に姿勢変更操作を行うことが可能な作業車の姿勢制御装置を提供する。
【解決手段】 車体における傾斜角変更方向に離れた一端側箇所及び他端側箇所夫々を走行装置の接地部に対して昇降自在な複数の駆動手段を備え、傾斜角検出手段の検出情報に基づいて、車体の水平基準面に対する傾斜角が設定傾斜角に維持されるように駆動手段を制御する姿勢変更制御を実行するように構成され、走行装置に対する車体の姿勢が大きく変化すると予測される姿勢変動タイミングでないことが判別されると片側駆動形式の姿勢変更操作を実行し、且つ、姿勢変動タイミングであることが判別されると両側駆動形式の姿勢変更操作を実行する。
(もっと読む)
作業車の姿勢検出装置及び作業車の姿勢制御装置
【課題】 車体が前後方向に移動するときに加速度が発生する場合であっても、車体の水平基準面に対する傾斜角を適正に検出することが可能となる作業車の姿勢検出装置を提供する。
【解決手段】 車体の前後傾斜角を求める傾斜角算出手段300が、加速度検出手段200にて検出される加速度が設定値より大きいとき及び加速度が設定値よりも大きい状態から小さい状態になったのち検出状態復帰用設定時間が経過するまでの間は、加速度が設定値よりも大きくなったときにおいて求めている車体の前後傾斜角、及び、時間経過に伴って順次検出される角速度センサ25の検出値に基づいて、車体の前後傾斜角を求め、且つ、加速度が設定値より小さく且つ検出状態復帰用設定時間以外のときには、時間経過に伴って順次検出される傾斜角センサ24の検出値及び時間経過に伴って順次検出される角速度センサ25の検出値に基づいて、車体の前後傾斜角を求める。
(もっと読む)
作業車の姿勢制御装置
【課題】 目標傾斜角を所望の傾斜角に調整する操作を煩わしさの少ない状態で容易に行うことが可能となる作業車の姿勢制御装置を提供する。
【解決手段】 走行装置に対する車体の傾斜姿勢を変更させる手動操作式の姿勢変更指令手段100が備えられ、姿勢制御手段400が、姿勢変更制御の実行中において、姿勢変更指令手段にて指令されると、その指令に基づいて走行装置に対する車体の傾斜姿勢を傾斜角変更方向一方側又は他方側へ変更すべく姿勢変更操作手段の作動を制御し、且つ、指令が終了すると、その終了時において傾斜角検出手段23にて検出される車体の水平基準面に対する傾斜角を目標傾斜角として設定し、その後はその設定した目標傾斜角に基づいて前記姿勢変更操作手段100の作動を制御するように構成されている。
(もっと読む)
作業車
【課題】 クローラ走行装置によって自走する作業車を、段差の乗り越え衝撃が緩和される状態で走行することも、車体前傾の発生を回避しながら走行停止をすることも可能な状態に得る。
【解決手段】 クローラ走行装置10の最も走行装置前端側に位置する第1接地転輪14aと、この第1接地転輪14aに隣り合った第2接地転輪14bとが、天秤リンク17を介してトラックフレーム11に支持されて背反揺動昇降自在になっている。天秤リンク17のロックアーム20に油圧シリンダ22が連動されている。車体の走行停止操作を検出する停止検出手段が非検出状態にあると、油圧シリンダ22が伸縮自由状態に切り換え操作されて第1接地転輪14aと第2接地転輪14bの背反昇降を許容する。停止検出手段が検出状態になると、油圧シリンダ22がロック状態に切り換え操作されて第1接地転輪14a及び第2接地転輪14bを昇降不能にロックする。
(もっと読む)
コンバイン
【課題】 車高調整可能なコンバインにおいて、円滑な車高調整を可能にする。
【解決手段】 機体下部に左右一対のクローラ式走行装置7を備えるコンバイン1であって、左側走行装置7のトラックフレーム16を、機体フレーム15に対して昇降自在に連結する前後一対の左リンク18LF、18LRと、右側走行装置7のトラックフレーム16を、機体フレーム15に対して昇降自在に連結する前後一対の右リンク18RF、18RRと、前側左リンク18LFと前側右リンク18RFを連結する前側左右連結部材20Fと、後側左リンク18LRと後側右リンク18RRを連結する後側左右連結部材20Rと、前側左右連結部材20Fと後側左右連結部材20Rを連結する前後連結部材21と、機体フレーム15と前後いずれかの左右連結部材20R(20F)との間に介設される昇降シリンダ22とを備える。
(もっと読む)
コンバインの走行姿勢制御装置
【課題】刈取機を所定高さ位置へ上昇操作して、旋回操作したときには、機体が左右に傾斜すると、左右両側のクローラは昇降制御されることにより、機体が転倒して危険であった。
【解決手段】穀稈を刈取る刈取機8と、穀稈を脱穀する脱穀機9とを設け、所定のスイッチ12の「ON」操作で、刈取機8と、脱穀機9のフィードチェン10との作動を自動停止し、機体1aの左右傾斜と、前後傾斜を検出するローリングセンサ6と、ピッチングセンサ7とを設け、刈取機8が所定高さ位置まで上昇させて停止させると、機体1aをローリング装置4でのローリング制御を停止制御する構成である。
(もっと読む)
1 - 20 / 24
[ Back to top ]