
Fターム[2B076ED27]の内容
収穫機本体(機枠、駆動) (12,770) | 制御対象 (1,228) | 操向、進行方向の転換 (86)
Fターム[2B076ED27]に分類される特許
21 - 40 / 86
作業車
【課題】直進状態と旋回状態とに切り換え自在な操向手段を備えて、直線状の作業経路に沿って走行する直進走行と前記直線状の作業経路の終端部から次回の直線状の作業経路に向けて予め定めた設定走行パターンにて走行する経路変更用走行とを繰り返す形態で作業を行う作業車に関する。
【解決手段】作業経路変更用走行を自動で行うように前記操向手段101を切り換え制御する作業行程切換制御を実行する自動旋回制御手段102と、前記作業経路変更用走行の開始を指令する手動操作式の自動旋回指令手段SWとが備えられ、前記自動旋回制御手段102が、前記自動旋回指令手段SWの指令に基づいて前記作業行程切換制御を実行するように構成する。
(もっと読む)
芝管理用車両全輪駆動システム

【課題】芝管理用車両の全輪駆動牽引制御システムで、タイヤのスリップを防止するシステム。
【解決手段】芝管理用車両10の全輪駆動牽引制御システム110が、車両を推進させる主輪を含む。第1モータが、主輪34,34’を回転させる。牽引制御システムは、第1モータ80電流要求または主輪もしくは第1モータの回転速度のいずれかを監視する第1モータと通信する第1部分を有し、牽引制御値を生成する。第2モータ90によって回転させられる副輪28は、車両を、車両非スリップ状態で操舵する。牽引制御システムの第2部分が、副輪の操舵角αの値を決定する。牽引制御値と比較され、牽引制御システムに記憶される速度限界値が、主輪牽引力損失事象を示すスリップ発生メッセージを生成する。操舵角の値とスリップ発生メッセージとを比較することによって生成された第2モータ駆動信号が、牽引力損失事象中、第2モータに電力供給する。
(もっと読む)
作業機
【課題】 作業場所の状況に応じて効率的に機体の昇降制御を行う作業機を提供する。
【解決手段】コンバイン(作業機)は、刈取部(作業部)と、この刈取部を昇降させるための刈取部昇降シリンダと、機体の左右両側に配置されるクローラ走行部と、クローラ走行部の接地面に対して機体を昇降させるために当該機体の左右に配置される機体昇降シリンダと、刈取部の昇降操作及び前記機体の前後進操作が可能な操作部と、を備える。また、コンバインは、操作部の操作に応じて刈取部昇降シリンダ、クローラ走行部及び機体昇降シリンダを制御する制御部を備える。制御部の制御モードは、切換スイッチにより、第1制御モードと第2制御モードとの間で切換可能である。制御部は、刈取部の上昇操作及び機体の後進操作の両方が検出された場合は、第1制御モードでは機体上昇制御及び機体の後進制御を行い、第2制御モードでは機体を上昇させずに後進制御を行う。
(もっと読む)
作業機
【課題】後進時において機体の地面への接触を防止しつつ、姿勢の水平制御が可能な作業機を提供する。
【解決手段】コンバイン(作業機)は、機体の左右両側に配置されるクローラ走行部と、クローラ走行部の接地面に対する機体の支持高さを昇降させるために当該機体の左右に配置される機体昇降シリンダと、を備える。また、コンバインは、機体の左右傾斜角を検出する傾斜角センサと、機体の前後進操作が可能な主変速レバーと、傾斜角センサの検出値に応じて機体昇降シリンダを制御することで機体を水平制御することが可能な制御部と、を備える。制御部は、操作部の後進操作が検出され(S103)、更に後進速度が所定速度以上であると(S104)、一側の前記機体昇降シリンダを伸長させて機体が最上端になる位置で維持するとともに、他側の前記機体昇降シリンダを伸縮させることで機体を水平に制御する(S106〜S109)。
(もっと読む)
コンバイン
【課題】走行機体の後方に存在する障害物を検出して、操縦者や周辺作業者に知らしめるバックソナー等の後方監視手段を備えたコンバインにおいて、圃場の畦際で後進する際や車庫入れのために後進する際、走行機体の後部と、その後方に存在する障害物が接触する直前まで後進操作を行わなければならない場合があり、この後進操作を操縦者が安全且つ確実に行えるようにする。
【解決手段】走行機体2に接近する障害物と走行機体2の距離に応じて、走行機体2の後進操作を操縦者や周辺作業者に知らしめる後進警報用ホーン16の警報出力周期を変化せしめるように構成した。
(もっと読む)
走行車両
【課題】走行機体を支持する左右の走行部に動力伝達する直進走行用変速装置と,前記左右の走行部に動力を逆回転伝達する旋回走行用変速装置と,前記直進走行用変速装置の変速用操作具と,前記旋回走行用変速装置の旋回用操作具を備えて成る走行車両において,その直進及び旋回走行の操作性を簡単で小型の機構にて向上する。
【解決手段】旋回用操作具にて回転する旋回入力軸72に,変速制御体81を変速軸線Xの回りに回転自在に設けるとともに,旋回制御体82を前記変速軸線Xに直交する旋回軸線Yの回りに設けて,前記変速用操作具に連動してその各々における軸線の回りに傾き回転する構成にし,前記変速制御体に設けた円形カム81aに摺動自在に係合する変速用滑り子部材97により前記直進走行用変速装置を変速作動し,前記旋回制御体に設けた円形カム82aに摺動自在に係合する旋回用滑り子部材106により前記旋回走行用変速装置を変速作動する。
(もっと読む)
走行車両
【課題】走行機体を支持する左右の走行部に動力伝達する直進走行用変速装置の変速用操作具と,前記左右の走行部に動力を逆回転伝達する旋回走行用変速装置と旋回用操作具を備えて成る走行車両において,直進及び旋回走行の操作性を向上する。
【解決手段】旋回用操作具10にて回転する旋回入力軸72に,当該旋回入力軸を中心とする円形カム84を備えた制御体81を,前記旋回入力軸の軸線と直角に延びる直交軸線Sの回りに自在に傾き回転するように設け,この制御体を前記変速用操作具13に連動して前記直交軸線Sの回りに傾き回転するように構成し,前記円形カムのうち前記直交軸線Sと直角に延びる直線W上の部分に摺動自在に係合する変速用滑り子部材97にて前記直進走行用変速装置25を変速作動する一方,前記円形カムのうち前記直交軸線S上の部分に摺動自在に係合する旋回用滑り子部材106にて前記旋回走行用変速装置を変速作動する。
(もっと読む)
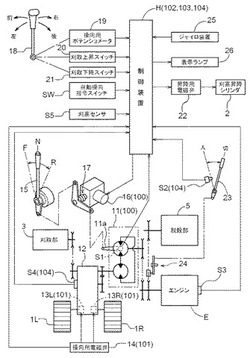
コンバインの油圧駆動回路
【課題】コンバインの油圧駆動回路等において、一部の油圧回路構成を共通化して製造コストを低減し、安価に提供できるものとする。
【解決手段】三つのリリーフ弁1,2,3と一つの分流弁4及び一つのチェック弁5を設けた油圧ブロックをベースブロックAとし、ベースブロックAに対して左ローリングシリンダ6を制御する電磁バルブ15を組み込んだ左ローリング油圧ブロックBと右ローリングシリンダ7を制御する電磁バルブ8を組み込んだ右ローリング油圧ブロックCを一体的に連結した機体制御油圧ブロックDと、ベースブロックAに対して刈取スライドシリンダ9を制御する電磁バルブ10組み込んだ刈取スライド油圧ブロックEと刈取上下シリンダ11を制御する電磁バルブ12を組み込んだ刈取上下油圧ブロックFを一体的に連結した刈取操向制御ブロックHを設ける。
(もっと読む)
走行車両
【課題】走行機体1を支持する左右の走行部2に動力伝達する直進走行用変速装置25と,前記走行部に動力を逆回転伝達する旋回走行用変速装置28と,前記直進走行用変速装置に対する変速用操作具13と,前記旋回走行用変速装置に対する旋回用操作具10を備えて成る走行車両において,その直進及び旋回走行の操作性を簡単で小型の機構にて向上する。
【解決手段】前記旋回用操作具にて回転する旋回入力軸72を内蔵するステアリングボックス20内に,前記旋回入力軸にて回転する変速制御体81と旋回制御体82とを,変速制御体が前記旋回入力軸に直交する変速軸線Xの回りに回転自在し,旋回制御体が前記旋回入力軸の軸線及び前記変速軸線Xに直交する旋回軸線Yの回りに回転自在に設け,これらの両方を,前記変速用操作具に連動してその各々における軸線の回りに傾き回転し,前記変速制御体の傾き回転にて前記直進走行用変速装置を変速作動し,前記旋回制御体の前記旋回入力軸による回転にて前記旋回走行用変速装置を変速作動する。
(もっと読む)
コンバイン
【課題】操向レバーを操作しながら機体の旋回状態を容易に切り換えることができ、旋回状態切換操作具の操作性を向上できるコンバインを実現する。
【解決手段】コンバインにおいて、操向レバー70の近傍で操向レバー70の右側に旋回状態切換操作具77を備え、旋回状態切換操作具77により、機体の旋回状態を、旋回半径が異なる複数の旋回状態に切換可能に構成する。
(もっと読む)
乗用型収穫作業機
【課題】圃場の状態に応じたきめ細かい旋回態様を選択可能な収穫作業機を提供する。
【手段】収穫作業機は走行機体の左右に配置したクローラによって走行する。左右のクローラは、直進機構と旋回機構との組み合わせによって周速度が相対的に変化し、これによって左右いずれかに旋回する。また、旋回時におけるクローラの動きは、旋回内側のクローラが逆転しないノーマルモードと、旋回内側のクローラが逆転するスピンターンモードとがある。更に、直進機構及び旋回機構はオペレータの操作によって出力を増減できる増減装置141,142を備えており、ノーマルモードにおいてもスピンターンにおいても速度を選択できる。このため、圃場の状況に応じた旋回速度を選択できる。
(もっと読む)
作業車の姿勢制御装置
【課題】 車体が旋回走行している状態において走行安定性が低下するおそれを少ないものにしながら、精度よく車体の前後傾斜角を検出して、姿勢変更操作手段による車体の前後傾斜方向での作動制御を良好に行えるようにする。
【解決手段】 前後傾斜角センサ24の検出値のうちの高周波数成分を除去した後の検出値と角速度センサ25の検出値を積分した積分値のうちの低周波数成分を除去した後の積分値とを加算して車体Vの前後傾斜角を求める傾斜角算出手段300を備えて構成され、車体Vが旋回走行状態であることが検出されると、下降傾斜作動を実行し且つ上昇傾斜作動を実行しない形態で、車体Vの水平基準面に対する前後傾斜角が前記設定傾斜角になるように姿勢変更操作手段の作動を制御する下降操作限定処理を実行する。
(もっと読む)
コンバイン
【課題】 既刈り側の茎稈列を見易くするための照明装置を、大きな出力を要しないもので、かつ簡単な構造で得る。
【解決手段】 搭乗運転部4が設けられた側の機体横一側部に進行方向前方側を照射する照明装置2を設け、照明装置2は、機体の横外方へ延出された支持腕21を装備し、この支持腕21に照明灯20を支持して、照明灯20の照射方向を、照明灯20の光軸が前方の刈取前処理装置3のデバイダ先端付近に向く状態と、刈取前処理装置3の刈幅中央付近に向く状態とに向き変更可能に構成されている。
(もっと読む)
走行車両
【課題】四輪自動車と同じような操作感覚で運転(操縦)可能なコンバインにおいて、主変速レバーと操向ハンドルとを直進用及び旋回用油圧駆動装置に連動連結するための機構を簡素化する。
【解決手段】ステアリングコラム内にある操向入力軸87の長手中途部に、操向入力軸87の縦軸線Z回りと当該縦軸線Zと交差する左右横長の横軸線X回りとに回動可能なボールジョイント型の球面軸受手段90を設ける。球面軸受手段90は、操向ハンドル10の操作量に応じた縦軸線Z回りの回動によって旋回用油圧駆動装置28の出力を調節し、且つ、主変速レバー73の操作量に応じた横軸線X回りの回動によって直進用油圧駆動装置25の出力を調節するように構成する。
(もっと読む)
走行車両
【課題】四輪自動車と同じような操作感覚で運転(操縦)可能なコンバインにおいて、主変速レバーと操向ハンドルとを直進用及び旋回用油圧駆動装置に連動連結するための機構を簡素化する。
【解決手段】主変速レバー73の操作に連動して案内軸104上をスライド移動する直進用スライダ111と、直進用HST式無段変速機構25の直進制御軸120とを、直進用プッシュプルワイヤ119にて連動連結する。操向ハンドル10の操作に連動して案内軸104上をスライド移動する旋回用スライダ112と、旋回用HST式無段変速機構28の旋回制御軸125とを、旋回用プッシュプルワイヤ124にて連動連結する。
(もっと読む)
走行車両
【課題】四輪自動車と同じような操作感覚で運転(操縦)可能なコンバインにおいて、主変速レバーと操向ハンドルとを直進用及び旋回用油圧駆動装置に連動連結するための機構を簡素化する。
【解決手段】主変速レバー73の傾動操作量に応じて操向入力軸87上をスライド移動する直進用スライダ111と、操向ハンドル10の回動操作量に応じて操向入力軸87上をスライド移動する旋回用スライダ112と、各スライダ111,112のスライド位置を検出する位置検出手段127,128と、各位置検出手段127,128の検出情報に基づいて各電動モータ141,142を駆動させるコントローラ102とを備える。
(もっと読む)
コンバイン
【課題】グレンタンクに収穫穀物が貯留され、直進性が低下した場合に、走行方向を修正する操向制御手段を具備するコンバインを提供する。
【解決手段】走行機体の左右どちらか一方にグレンタンク15を具備するコンバインにおいて、作業時に、グレンタンク15の重量を検知して、その重量に応じて操向手段を駆動して、直進するように操向制御手段150を具備した。また、前記操向制御手段は、左右のクローラの回転数を変更することにより行う。
(もっと読む)
コンバイン
【課題】補助送風ファン35付きの脱穀装置を有するコンバインにおいて、圃場の枕地にて方向転換するときに、三番ロスや粉塵立ちの発生を抑制する。
【解決手段】フィードチェン6と補助送風ファン35とが同じ系統の動力伝達系に属する構成にする。前記動力伝達系におけるフィードチェン6及び前記補助送風ファン35より上流側にFCクラッチ63を配置する。FCクラッチ63は、刈取前処理装置3が所定の非作業高さHaまで上昇する動作に連動して切り作動するように構成する。
(もっと読む)
制御装置
【課題】同時使用することのない複数の電磁比例弁の同時駆動を防止し、信頼性を向上させると共に、コストを低下させることができる制御装置を提供する。
【解決手段】同時作動しない複数のアクチュエータにそれぞれ連通する複数の電磁比例弁72、76を備え、これら電磁比例弁72、76を制御部66からの信号に基づきドライバ80を介して制御するようにした制御装置65において、前記ドライバ80からの信号を前記複数の電磁比例弁72、76のいずれか1つに通電するように切換えるリレー73を配置し、1個の前記ドライバ80により前記複数の電磁比例弁72、76を駆動する。
(もっと読む)
コンバイン
【課題】自動方向制御中の自動方向制御の中断および再開のための操作の煩雑化。
【解決手段】操向レバー15により走行方向が操作される左右一対の走行装置2と、該走行装置2の前方に設けられる刈取部5とを有し、走行装置2は刈取部5の各分草体30が互いに隣接する穀稈列の間の株間を通過できるように、植立穀稈を感知する穀稈感知センサ35の信号により自動方向制御され、該自動方向制御は、該自動方向制御実行中に、前記操向レバー15が操向操作されると前記自動方向制御を無効にし、その後、一定時間以上に亘って前記操向レバー15が操向操作されずに刈取作業が行われると、他の手動スイッチ操作をすることなく、自動的に前記自動方向制御が有効となるように構成したコンバイン。
(もっと読む)
21 - 40 / 86
[ Back to top ]