
Fターム[2B304KA11]の内容
Fターム[2B304KA11]の下位に属するFターム
作業能率向上 (102)
作業精度向上 (164)
ハンチング、ダッシング防止 (18)
Fターム[2B304KA11]に分類される特許
1 - 20 / 61
作業機の油圧駆動装置
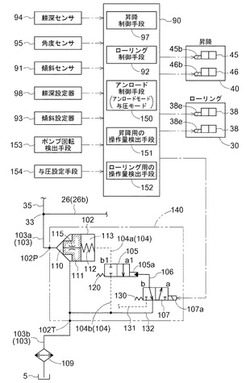
【課題】アンロード回路の調節による複数の油圧アクチュエータの駆動調節を適切に行わせることができる作業機の油圧駆動装置を提供する。
【解決手段】複数の油圧アクチュエータの操作弁機構30,40に圧油供給する圧油供給路26から圧油を排出するアンロード回路103、アンロード回路103を開度調節する操作弁107を設けてある。操作量検出手段151,152による検出情報、ポンプ回転検出手段153による検出情報に基いて操作弁107を制御するアンロード制御手段150を設け、操作弁機構30,40の操作量に応じてアンロード回路103を開度調節するように、油圧ポンプが低速回転であるとアンロード回路103を小開度に調節するように、油圧ポンプが高速回転であるとアンロード回路103を大開度に調節するように構成してある。
(もっと読む)
作業車両

【課題】本発明は、路上走行と耕耘作業のモード切替手段を設けることによって路上走行速のままで耕耘作業に入るような事態を回避し、問題解決を図らんとするものである。
【解決手段】メータパネル(8)の適所にスイッチON・OFFにより耕耘作業モードと路上走行モードとに切り替えできるモード切替スイッチ(22)を設け、前記耕耘作業モードの詳細設定をする各種設定器(29)は、前記メータパネル(8)部周辺若しくは運転操作部(9)近くに設置してあることを特徴とする作業車両とする。また、前記各種設定器(29)は、耕深設定器(24)、傾斜設定器(26)、ブレーキ調整設定器(28)等からなり、タッチパネル画面で調整が行えるように構成してあることを特徴とする作業車両とする。
(もっと読む)
作業車両
【課題】昇降可能に装架した苗植付部や播種機等の作業装置の上昇操作を忘れた場合においても、機体後進による作溝機の詰まりや破損等の事態を招くことなく、圃場作業を円滑に進めることができる作業車両を提供する。
【解決手段】苗移植機は、作業装置4を昇降自在に支持するリンク機構およびその昇降位置検知部材と、作業装置4に設けた作溝器に粒状体を供給する粒状体供給装置5と、前後進の車速選択とリンク機構の支持高さ調節とを行う走行操作レバー73およびその走行操作検知部材73Sと、後輪回転検知部材と、報知部材71と、作業装置4に配置された報知停止スイッチ72とを走行車体に備えて構成され、リンク機構が所定高さ以下、走行操作レバー73が後進車速位置、後輪11が回転の3条件全てに該当した時に、報知停止スイッチ72の操作まで報知部材71を作動する制御を構成したものである。
(もっと読む)
作業機
【課題】複数の表示装置を備えていても、表示装置の種類(機種)や仕様の変更を容易に行うことができる作業機を提供する。
【解決手段】トラクタ2は、検出器で検出した状態を表示可能な複数の表示装置(メータパネル30及び液晶モニタ80)と、該複数の表示装置がCAN通信網Nを介して接続されると共に検出器が接続され、且つ検出器で検出された状態を示す検出情報を複数の表示装置に出力するメインECU50と、を備える。メインECU50は、検出情報を表示させる表示装置を識別するための識別情報を出力する識別情報出力手段52と、該検出情報を出力する検出情報出力手段51とを有する。複数の表示装置は、識別情報によって指定されたときに、検出情報出力手段51によって出力された検出情報を表示する。
(もっと読む)
トラクタ
【課題】車輪がスリップした場合に適正にプラウを上昇させて耕起作業を継続するトラクタを構成する。
【解決手段】牽引負荷センサSで検出した牽引負荷値で制御情報を参照して得られる目標対機体レベル値までプラウを上昇させるドラフト制御手段34が備えられている。制御情報はプラウの目標耕深に設定した際の目標耕深と牽引負荷値とに基づいて設定されるものであり、スリップ率取得手段37で検出するスリップ率が閾値を超えた場合には、既に設定されている制御情報に代えて、同じ値の牽引負荷値に対する目標対機体レベル値が高い値となる制御情報を新たに設定することでプラウを上昇させる。
(もっと読む)
乗用作業車
【課題】車体の走行に伴って車体周囲の作業対象物に対する作業を行う電動式作業デバイスの作業負荷の変動による不都合を低減する乗用作業車を提案する。
【解決手段】駆動車輪ユニットを走行駆動するための走行用電動機ユニットと、目標走行速度を設定するために運転者によって操作される速度設定操作ユニットと、車体の走行に伴って車体周囲の作業対象物に対する作業を行う作業デバイスを駆動するための作業用電動機と、作業用電動機の負荷を評価する作業負荷評価部によって評価された作業用電動機の負荷がしきい値より高い異常負荷である場合に目標走行速度より低い例外速度で走行用電動機ユニットを制御する例外速度制御を実行する例外速度制御部とを備えている。
(もっと読む)
作業車両
【課題】作業者が設定した所望の溝を圃場に精度よく形成することが可能な作業車両を提供する。
【解決手段】
トラクタは、圃場に自動制御によって溝を形成するに際し、まず、溝掘り作業機と圃場面との接地位置を検出する(S3)。そして、この接地位置を基準点として、溝掘り作業機を下降させることによって、溝の始端部において、設定された初期深さまで正確に溝を形成し、この始端部から所定の勾配で圃場に溝を形成する(S4)。
(もっと読む)
トラクタの作業機昇降装置
【課題】操縦席から上げ側ストッパを移動調節するだけの簡単な設定動作により、リフトアームの上方回動高さの規制を能率よく正確に行うことができるトラクタの作業機昇降装置を提供する。
【解決手段】ポジションコントロールレバー15に片当たりすると共に、電動モータ19によって回動されるポジションコントロールアーム17と、リフトアーム12のフィードバックリンク12aによって切り換えられる昇降バルブを備えるトラクタの作業機昇降装置であって、ポジションコントロールレバー15を案内するレバーガイド21に、ポジションコントロールアーム17、又はポジションコントロールアーム17とポジションコントロールレバー15にそれぞれに接当して、作業機の最上げ位置を設定する上げ側ストッパ33を設けた。
(もっと読む)
作業機
【課題】 本発明は、種々の条件に対応して原動機の駆動回転数を適正に設定し、良好な走行性能及び作業性能を得ることを課題とする。
【解決手段】 走行推進体と原動機を備える走行車体を設け、走行車体の後側に昇降リンク装置を介して作業部を昇降可能に設け、昇降リンク装置を昇降させる昇降用アクチュエータを設け、原動機は走行推進体と昇降用アクチュエータを駆動する構成とし、該昇降用アクチュエータを駆動させて作業部を昇降操作する昇降操作具を設けた作業機において、昇降用アクチュエータが作業部を上昇作動させるとき、走行推進体が停止する状態であれば原動機の駆動回転数を上昇用の設定回転数まで上昇させる構成とした。
(もっと読む)
トラクタの作業機上限規制装置
【課題】作業機をトラクタの後部にリンク機構を介して昇降自在に装着したものにおいて、作業機の上昇上限位置をトラクタ近接位置に容易に設定することができるトラクタの作業機上限規制装置を提供する。
【解決手段】作業機8をトラクタ1の後部に昇降自在に装着するリンク機構9を備え、このリンク機構9を駆動して作業機8を上昇させる昇降シリンダ22を備え、作業機8が上昇してトラクタ1に近接した位置であるトラクタ近接位置に達したことを検出する上限検出センサ47を設け、この上限検出センサ47の検出信号によって昇降シリンダ22の作業機上昇動作を停止させるように構成する。
(もっと読む)
トラクタの作業機制御装置
【課題】ドラフトアップ機能を有効に使うことのできるトラクタの作業機制御装置を提供する。
【解決手段】ドラフト用スプール作動レバーを一端側を支点として揺動させて接当部に対する押動部材の位置を調整することで作業機を上昇させるべき牽引負荷を設定可能とし、設定以上の牽引負荷によりドラフトフィードバックロッドが押動されて、ドラフト用スプール作動レバーが他端側を支点として揺動し且つ押動部材が接当部を押動して作業機を上昇させるべくスプールを作動させるよう構成し、ドラフト操作手段で作業機を上昇させた際に、リフトアームが最上昇位置付近に上方揺動すると、該リフトアームの上昇動作を停止させるべく、上昇規制リンクによってドラフト用スプール作動レバーが、他端側を支点として押動部材が接当部から離れる方向に揺動され且つこれを許容するようにドラフトフィードバックロッドが縮むよう構成する。
(もっと読む)
乗用型田植機
【課題】植付部が自動的に昇降する際の安全性を向上させた乗用型田植機を提供する。
【解決手段】乗用型田植機は、車体と、報知部と、植付部と、植付部を上下に昇降するための昇降シリンダと、昇降シリンダの駆動を制御する制御部と、を備える。そして、前記制御部は、植付部を自動的に昇降させる制御を開始するトリガを検出した場合、前記報知部によって植付部の自動昇降を報知した後、昇降シリンダを駆動して植付部を昇降させる。
(もっと読む)
農業用作業車両
【課題】簡単な構成で旋回操作の開始及び終了を検出することが可能な農業用作業車両を提供する。
【解決手段】サイドクラッチ操作機構45は、ステアリングハンドル7が所定の操作量以上操作された場合に、サイドクラッチを切断する。クラッチセンサ49L,49Rは、サイドクラッチの作動状況を検出可能である。制御部は、植付部を昇降駆動するための昇降シリンダの駆動を制御する。植付クラッチは、植付部に対する駆動力の伝達の有無を切換可能である。また、前記制御部は、植付部の作動中において、植付クラッチの切断、サイドクラッチの切断、及び後進操作を、旋回時自動昇降制御の開始トリガとして検出可能である。そして、前記制御部は、開始トリガのうち何れか1つを検出すると、植付部を上昇させ、その後、前記サイドクラッチの接続を検出すると、植付部を下降させる。
(もっと読む)
トラクタの作業機姿勢制御装置
【課題】ローリング制御仕様でないトラクタを容易にローリング制御仕様にすることのできるトラクタの作業機姿勢制御装置を提供する。
【解決手段】左右リフトアーム5の一方と、左右ロワーリンク2の一方とをローリングシリンダ6で連結すると共に、他方のリフトアーム5と他方のロワーリンク2とをリフトロッド7で連結し、ローリングシリンダ6を伸縮させることで一方のロワーリンク2を他方のロワーリンク2に対して上下揺動可能とし、ローリングシリンダ6を制御するローリングバルブ10を備え、車体1に装着される作業機の油圧アクチュエータ39を制御するための補助コントロールバルブ9を備え、ローリングバルブ10を補助コントロールバルブ9に着脱自在に取付け可能とすると共に、補助コントロールバルブ9に供給された油圧ポンプPからの圧油がローリングバルブ10に供給可能とされ且つ該圧油によってローリングシリンダ6を制御可能とする。
(もっと読む)
作業車
【課題】複数の制御モードの選択切り換えと、その切り換えた制御モードでの設定変更の可否と、設定変更した値を記憶するか否かの選択とを単一の選択操作具で行わせるようにして、構造の簡素化と操作性の向上とを図る。
【解決手段】制御装置100は、一つの制御モードが選択された状態において、選択操作具67が選択操作のために設定された時間よりも長い時間にわたって操作されると、制御手段101〜105の制御状態を設定操作具45により変更設定可能な変更設定モードを設定し、変更設定モードの設定後に選択操作具67が再度長い時間にわたって操作されると、制御手段101〜105の変更された状態を記憶手段106に記憶させるように構成した。
(もっと読む)
作業車の作業装置昇降構造
【課題】作業車の作業装置昇降構造において、旋回の終了に伴って上昇状態の作業装置が地面まで自動的に下降駆動されるように構成した場合、作業装置が下降駆動されるタイミングのばらつきを抑える。
【解決手段】機体が旋回を開始したと判断する旋回開始判断手段と、旋回開始判断手段により機体が旋回を開始したと判断されてからの旋回中の機体の走行距離Eを連続的に検出する走行距離検出手段とを備える。走行距離検出手段により検出された機体の走行距離Eが設定距離E1に達すると、上昇状態の作業装置を地面まで自動的に下降駆動させる自動下降手段を備える。
(もっと読む)
作業車両搭載用制御装置
【課題】制御手段210,213,281,282の組み付け工程において、作業車両1の各搭載箇所に対して、誤ったプログラム書き込み済制御手段を取り付けてしまう人的ミスを回避できるようにする。
【解決手段】各制御手段210,213,281,282を作業車両1に組み付けた状態において、各制御手段210,213,281,282にその固有情報に応じた識別子を設定する。通信バス280に接続された外部端末290から識別子毎の制御プログラムを読み出して、識別子の一致する制御手段210,213,281,282にインストールするように構成する。
(もっと読む)
乗用型田植機
【課題】植付部のローリングバランスが良い乗用型田植機を提供することを目的とする。
【解決手段】植付部15の幅方向に延設された植付部フレーム23の両端には、苗載せ台を支持する支持ステー30,30が立設されており、支持ステー30,30間には連動軸57が回動自在に支持されている。連動軸57には整地ロータ昇降用アクチュエータ54が取付けられたモータ・ポテンショベースが遊嵌されている。植付部フレーム23の中央部には、ローリング支軸31が取付けられており、昇降リンクが取付けられるリンクホルダ32がローリング支軸31に回動自在に嵌合している。リンクホルダ32の一方には植付部のローリングを制御するためのローリング制御用アクチュエータ42が取付けられており、整地ロータ昇降用アクチュエータ54はリンクホルダ32を挟んでローリング制御用アクチュエータ42とは反対側に配設されている。
(もっと読む)
苗移植機
【課題】畦越えなどしようとして、苗植付装置を上昇させるときにエンストを起こさないようにすることができる苗移植機を提供すること。
【解決手段】車体の後側に昇降リンク装置2を介して昇降可能に装着された苗植付装置3を接地する作業位置まで下降させる操作と対地浮上する所定の非作業位置まで上昇させる操作が行える昇降操作装置110bと苗植付装置を任意の高さに上昇させることができる任意上昇操作装置110cを設け、任意上昇操作装置110cを操作すると、その上昇操作量に応じてエンストさせないようにエンジン12のアイドリング回転数を上昇させ、昇降操作装置110bを操作するとエンジンのアイドリング回転数を上昇させる作動状態であると、それを解除してアイドリング回転から元の通常回転に戻るようにしたので、畦越えしながらの植付時、エンジン12のアイドリング回転数が上昇するので、走行負荷に対処でき、エンストを防止できる。
(もっと読む)
水田作業車
【課題】水田作業車において、旋回終了位置が検出されると作業装置を作業状態に操作するように構成する場合、作業装置の作業状態への操作が適切に行われるようにする。
【解決手段】機体の旋回開始からの機体の走行距離を検出する走行距離検出手段56、又は機体の旋回開始からの経過時間を検出する経過時間検出手段57を備える。走行距離検出手段56の検出値が設定距離に達するまでに、又は経過時間検出手段57の検出値が設定時間に達するまでに、作業装置操作手段55による作業装置の作業状態への操作が終了しなければ、作業装置操作手段55の作動を停止させる停止手段58を備える。
(もっと読む)
1 - 20 / 61
[ Back to top ]