
Fターム[2B304KA13]の内容
Fターム[2B304KA13]に分類される特許
1 - 20 / 164
代かき作業機の耕深表示装置
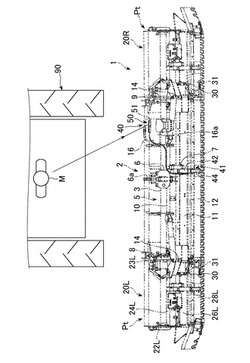
【課題】代かき作業時に耕深を一定にすることができ、耕深の確認時に走行機体の直進性が維持できる代かき作業機の耕深表示装置を提供する。
【解決手段】耕深表示装置40は、回転自在に支持された耕耘ロータの後方に上下方向に回動自在に配設された第1整地板11とこの後部に上下方向に回動自在に配設されて耕土表面を均平にする第2整地板12とを備えて走行機体90に装着される代かき作業機1に搭載される。耕深表示装置40は、一端側が機体5に回動自在に接続されて他端側が第2整地板12に回動自在に接続され耕耘ロータの耕深に応じた第1整地板11に対する第2整地板12の回動に伴って上下方向に回動するリンク機構部41と、この回動に応じて耕深を表示する耕深表示部50とを有する。耕深表示部50は、走行機体90に搭乗した作業者Mが代かき作業1に向かって斜め後方へ振り返ったときの作業者Mの視線の延長先に設けられる。
(もっと読む)
歩行型草刈り機

【課題】 刈取部を昇降する昇降機構の操作をハンドルを握った状態のままで操作することができる遠隔操作機構を備えた歩行型草刈機の提供。
【解決手段】 駆動輪を備えた走行駆動部の前側に、昇降機構により昇降可能な刈取部を備え、走行駆動部の後側にハンドル部を備えた歩行型草刈り機において、
前記昇降機構を操作する遠隔操作機構がハンドル部に位置する操作者の近くに備えられている構成とした。
(もっと読む)
歩行型草刈り機
【課題】 果樹園の低い枝の下や、壁際など、車体が入れない箇所でも草刈りを可能とする歩行型草刈機の提供。
【解決手段】 クローラ11による走行駆動部1の前側に、昇降機構5により昇降可能な刈取部3を備えた歩行型草刈り機において、走行駆動部1の前側には先端側に左右一対のキャスター21、21を備えた支持フレーム2が走行駆動部1に対し横スライド可能な横スライド機構4を介して連結され、刈取部3は支持フレーム2に対し昇降機構5を介して昇降自在に吊下されている構成とした。
(もっと読む)
歩行型草刈り機
【課題】 地面の状況にかかわらず草の刈り過ぎや刈り残しを無くすことができる歩行型草刈機の提供。
【解決手段】 クローラ11による走行駆動部1の前側に、昇降機構5により昇降可能な刈取部3を備えた歩行型草刈り機において、刈取部3が走行駆動部1に対しローリング軸受け機構6を介してセンターローリング可能に連結されている。
(もっと読む)
田植機
【課題】 本発明の課題は、植付部を適正に稼動することができる田植機を提供することにある。
【解決手段】 転向車輪と後輪とを備えて旋回走行可能な水田作業車の旋回動作信号と、同水田作業車に昇降可能に搭載されて均平用のフロートを備えた植付部の高さ位置信号とを受け、機体の旋回動作と対応して植付部の昇降調節と稼動を制御する制御処理部を備える田植機において、後輪を駆動する後輪伝動部(16)には、後輪車軸(3a)へ減速伝動する減速伝動部と、該減速伝動部よりも伝動上手側に設けた走行距離を算出するための回転センサ(16s)とを備え、旋回のためのハンドル操作又は植付切操作で走行の距離カウントを開始し、走行の距離カウントが所定の旋回走行距離に到達したときに植付部を稼動制御する制御装置を設けた。
(もっと読む)
苗移植機
【課題】レバー式植付操作機構に旋回連動機構を備える苗移植機において、植付昇降レバーの誤操作によることなく、植付部の安定動作を確保することができる苗移植機を提供する。
【解決手段】苗移植機は、走行車体を旋回操作する操舵部材(4)と、走行車体に昇降可能に支持した植付部(6)と、この植付部(6)の上昇、中立、下降、植付の順に切替え動作させる植付昇降レバー(8)と、上記操舵部材(4)による旋回の開始及び終了と連動して植付昇降レバー(8)を上昇と下降の位置に移動させる自動昇降機構(C)とを備えて構成され、上記植付部(6)の植付作業を検知する作業検知部材を設け、検知した作業が所定の継続範囲に該当しない場合に自動昇降機構(C)の作動を停止するものである。
(もっと読む)
苗移植機
【課題】旋回操作連動で植付部を昇降制御する場合に、下降時の植付部の保護と圃場面の検出精度を損なうことなく、速やかに植付を再開できる苗移植機を提供する。
【解決手段】苗移植機は、圃場走行用の走行部(2,3)と、苗移植の作業高さを検出する圃場面センサ(6s)を備えて昇降リンク(5)により昇降可能な植付部(6)と、この植付部(6)を左右水平に角度調節するローリング機構(7)と、の旋回開始で植付部(6)を上昇保持し、旋回終了で作業高さに戻す旋回連動昇降機構とを設けて構成され、上記植付部(6)の高さ位置を検出する位置検知装置(5s)を設け、この位置検知装置(5s)により、旋回開始時の植付部(6)の作業高さを記憶するとともに、旋回終了時の植付部(6)の下降の際に、記憶による作業高さ位置から上方に所定距離の高さ位置を境にその上下で下降速度を切替え制御可能に上記旋回連動昇降機構を構成したものである。
(もっと読む)
移動式電動作業機
【課題】作業部の過負荷運転を回避することができる移動式電動作業機を提供する。
【解決手段】走行部20によって移動しながら、ブレードインバータ14A・14Bから供給される電力により駆動される作業部10A・10Bによって作業を行い、デッキ高さ調整部30によってデッキ3のデッキ高さ位置Hを調整する電動式芝刈作業機100であって、ブレードインバータ14A・14Bからのブレードインバータ電流値Iba・Ibbに基づいて、作業部10A・10Bの作業負荷が一定となるように、デッキ3のデッキ高さ位置Hの調整を制御する。
(もっと読む)
苗移植機
【課題】旋回後に苗の植付開始位置を適切な位置に揃えることができる苗移植機を提供すること。
【解決手段】苗移植機に、旋回時又は後進時には植付部52を自動的に上昇させ、前進時には植付部52を下降させる自動昇降機構Aと、植付部52の昇降動作及び苗植付動作の入切動作を行う植付昇降レバー33と、植付部52を上昇させた状態で後進させると後輪回転センサ182により検知される後進時の回転数が予め設定された基準回転数を上回ると自動昇降機構Aを作動させない制御構成とする制御装置200を設けたので、旋回後に植付部52を下降させて苗の植え付けを再開する際に、作業者は植付昇降レバー33を手動操作して植付部52を下降させることができるので、旋回後の苗の植付開始位置を適切な位置に揃えられ、苗の植付精度が従来より向上する。
(もっと読む)
田植機
【課題】土壌条件や植深をリアルタイムで取得できる田植機を提供する。
【解決手段】田植機は、土壌反力検出装置27と、植付爪22を備えた植付部と、土壌反力検出装置27の出力に基づいて苗の植深を算出する制御部と、を備えている。土壌反力検出装置27は、植付爪22に生じる土壌反力を検出する。また土壌反力検出装置27は、植付爪22の近傍に配置されるプローブ29と、ロードセル28とを備える。前記プローブ29は、植付爪22の長手方向と平行に配置された棒状部材であり、その一端側は植付爪22の先端と同じ方向を向くとともに、他端側はロードセル28の荷重検出面に当接している。
(もっと読む)
田植機
【課題】土壌条件や植深をリアルタイムで取得できる田植機を提供する。
【解決手段】田植機は、植付部と、土壌反力検出装置と、制御部と、を備える。植付部は、植付爪を駆動することにより苗の植付けを行う。土壌反力検出装置は、植付爪が苗の植え付けを行うごとに土壌から受ける土壌反力を検出する土壌反力検出部と、植付爪の回転位相を検出する回転位相検出部を備えている。前記制御部は、前記土壌反力及び回転位相に基づいて植深値を算出する(S102)。そして制御部は、検出された植深値に基づいて、植付部を昇降制御する(S109)。
(もっと読む)
トラクター直装式ブームスプレーヤ
【課題】 ブームが実際に傾斜した場合にそのブームを速やかに、かつ適正に回動制御して迅速な傾斜角度の補正ができるトラクター直装式ブームスプレーヤを提供する。
【解決手段】 ブーム4が基部フレーム3に対してその重心近傍で回動自在に支持されているとともに、ブーム4を正逆方向に回動させるブーム回動手段8と、前輪車軸24の車体21に対する相対的な傾斜角度を計測する前輪傾斜角度計測手段9と、走行面の凹凸により後輪が傾斜する前に、前輪車軸の相対的な傾斜角度の方向と反対方向にブーム4を回動させるための準備をブーム回動手段8に実行させるブーム回動準備制御手段11と、ブーム4の基部フレーム3に対する相対的な傾斜角度を計測するブーム傾斜角度計測手段10と、ブーム4の相対的な傾斜角度が所定の範囲を超えた場合、回動準備中のブーム回動手段8を駆動してブーム4を制御するブーム回動制御手段12とを有する。
(もっと読む)
作業車両
【課題】作業機の昇降制御を安定させた作業車両を提供する。
【解決手段】田植機は、植付部と、制御部と、を備える。制御部は、植付部の加速度(具体的にはフロート角加速度)を取得する。そして制御部は、前記加速度に二階微分ゲインKd2を乗じたものに基づいて、植付部の昇降制御を行う。このように植付部の加速度に基づいて昇降制御を行うことにより、植付部の上下速度の変動が大きい場合の振動的な応答を抑制できる。また、前記加速度は、圃場表面からの反力によって生じるため、当該加速度に基づいて制御を行うことにより、圃場の硬さに応じた制御動作を実現することができる。
(もっと読む)
田植機
【課題】田植機において、ピッチング角等に基づく補正を適切に行い、良好な昇降制御性能を得ることができる構成を提供する。
【解決手段】制御部は、フロートの揺動角の検出値を、ピッチング角に基づいて補正して(ステップS106)、植付部を昇降制御するように構成されている。そして制御部は、ピッチング角の変化速度又は加速度が大きい場合には、前記補正を行わない。即ち、車体が急激なピッチング挙動を示すときには、ピッチング角による補正の影響を小さくすることにより、意図しない昇降制御が行われてしまうことを防止し、植付部の不必要な高さ変動を抑えることができる。
(もっと読む)
田植機
【課題】苗継ぎ作業時に、エンジンの回転数をアイドル回転数よりも低下させた場合でも、植付部を設定角度に維持することができる田植機を提供する。
【解決手段】エンジン14が搭載された走行部10の後方に植付部40を左右傾斜可能に装着した田植機1において、制御装置100は、苗継ぎ位置検出スイッチ23aのON信号を検出すると、エンジン14の回転数がアイドル回転数より低い設定回転数となるように第一アクチュエータ71を制御して、かつ、角速度センサ61の検出値Bを静止状態の検出値Bで置き換えて前記第二アクチュエータ72を制御する。
(もっと読む)
田植機
【課題】植付部の昇降制御の追従性を向上させた田植機を提供する。
【解決手段】田植機は、植付部と、フロートセンサと、制御部と、を備えている。植付部は、地面に接触可能なフロートを備える。フロートセンサは、フロートの揺動角を検出する。制御部は、フロートセンサの出力値の微分値を制御量としたPID制御(ステップS103)により、植付部を昇降制御する。また制御部は、フロートセンサが検出したフロートの位置と、前記フロートの位置の目標値と、の差をフロートセンサの検出値に基づいて修正する(ステップS104)。
(もっと読む)
代かき作業機の耕深表示装置
【課題】代かき作業時に耕深を一定にすることができる耕深表示装置を提供する。
【解決手段】耕深表示装置40は、機体5に回転自在に支持された耕耘ロータ13の上部を覆うシールドカバー13と、この後部に上下方向に回動自在に配設されて耕耘ロータ13により耕耘された耕土を整地する第1整地板11と、この後部に上下方向に回動自在に配設されて耕土表面を均平にする第2整地板12とを備える代かき作業機1に設けられる。耕深表示装置40は、一端側が機体5に回動自在に接続されて他端側が第2整地板12に回動自在に接続され、耕耘ロータ13により耕耘された耕土の耕深に応じた第1整地板11に対する第2整地板12の回動に伴って上下方向に回動自在な揺動アーム42と、揺動アーム42の回動に応じて耕深を表示する耕深表示部50とを有してなる。
(もっと読む)
トラクタの耕深自動制御装置
【課題】本発明では、トラクタの耕深自動制御装置において、安定した耕深を維持して作業を続けられるようにすることを課題とする。
【解決手段】作業機2をリフトアーム17で昇降可能にトラクタ1に装着し、作業機2を昇降するリフトアーム17に設けるリフトアームセンサ30と端部が接地しながら作業機2の対地作業機構20を覆う作業機カバー23の昇降位置を検出するカバーセンサ29を設け、該カバーセンサ29の検出する対地作業機構20の耕深を設定耕深値となるようにカバーセンサ29の検出耕深値に基づくカバー耕深制御を行い、このカバー耕深制御の間にリフトアームセンサ30が検出する作業機位置検出値を制御基準値として記憶し、以後リフトアームセンサ30が検出する作業機位置検出値が制御基準値となるようにリフトアーム耕深制御で昇降制御してなるトラクタの耕深自動制御装置とする。
(もっと読む)
作業車両
【課題】作業機の圃場での作業深さの表示又は制御を低コストで行うことが可能な作業車両を提供することを課題としている。
【解決手段】本発明は、走行機体2に連結された作業機4を昇降させるリストアーム22を該走行機体2に設け、該作業機4の圃場での作業深さの表示又は制御を行う制御部32を備えた作業車両であって、前記リストアーム22のリフト角αを検出するリフト角検出手段33を備え、リフトアーム22のリフト角α情報及び該リフト角αとなる場合の作業機4の対地高さH情報からなるデータセットを、少なくとも2組以上、予め制御部32に記憶し、該制御部32は、前記2組以上のデータセットから、該作業機4におけるリフト角αと対地高さHの相関関係を求め、該相関関係に基づき、リフト角検出手段33からの検出値から、該作業機4の圃場での作業深さDを算出する。
(もっと読む)
苗移植機
【課題】
苗載せ台を畦際側とは反対側へ移動させるときは、苗植機の走行を直ちに停止して、植付装置の植付操作を停止して、苗タンクを目的の方向へ大きく移動させて、苗移植機の旋回操作等を行わせる。又、この一旦横端へ移動させていた苗タンクを移動前の苗植付停止位置に戻してから、苗移植機の植付動作を行わせる必要があり、煩雑で正確な操作を要し、相当の時間と熟練を要する。
【解決手段】
植付装置3の伝動を停止した状態で苗タンク2を横端へ移動させるときの、摺動軸1の横送回転数をタンク送りセンサ6で検出し、この苗タンク2が横端に移動した後に前記苗植作用を開始するときは、前記タンク送りセンサ6が検出した横送回転数に基づいて摺動軸1を伝動回転して、前回苗植停止位置に苗タンク2を移動復帰する構成とする。
(もっと読む)
1 - 20 / 164
[ Back to top ]