
Fターム[2B304PA02]の内容
Fターム[2B304PA02]の下位に属するFターム
丸ハンドル (41)
Fターム[2B304PA02]に分類される特許
21 - 37 / 37
乗用型苗植機
【課題】 適切な位置で苗の植え付けができる制御装置を備えた乗用型苗植機を提供すること。
【解決手段】 エンジンからの動力が伝達される伝動装置と、該伝動装置からの出力で駆動する左右の後輪と、該後輪への伝動を入り切りするサイドクラッチと、昇降自在の苗植付部と、走行距離を検出する走行距離検出センサと、操向操作用のハンドルを走行車体に設け、ハンドルの操作角度が所定値以上になると走行距離検出センサにより走行距離の検出を開始し、該走行距離が設定距離に達すると報知する報知装置を設けたことを特徴とする乗用型苗植機とした。
(もっと読む)
乗用型田植機

【課題】 乗用型田植機において、旋回時に、操縦者は機体の旋回操向操作以外に、作業装置の駆動の入り切り操作や作業装置の上昇・下降操作をしなければならず、旋回時の操向操作に専念できず、未だ、旋回操作性の点において課題があった。
【解決手段】 左右前輪を所定角度以上に操向操作した状態で後輪の伝動軸回転数を検出し、後輪の伝動軸回転数の検出に基づいて走行距離算出手段にて走行距離を算出し、前記伝動軸回転数が第一の設定値を超えると田植装置を降下させ、その後、前記伝動軸回転数が第二の設定値になると田植装置を駆動させて旋回時の諸作業用の作動を自動的に行わせ、前記伝動軸回転数が第二の設定値になっても田植装置が下降して接地していない場合にモニターに表示する制御装置を設けた。
(もっと読む)
農作業車
【課題】 旋回制御にあっては、目標の180度の操向旋回や作業条合わせ等を自動的に行なわせることが難しい。
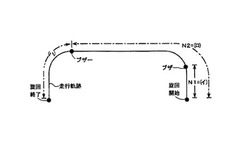
【解決手段】 ステアリングハンドルの切れ角を検出するハンドル切れ角センサと、左右の後車輪へ伝動する伝動軸と、該伝動軸の回転を検出する車軸回転センサと、後車輪のサイドクラッチを設け、車体の後部に苗植装置を昇降可能に装着し、苗植装置を上昇させると車軸回転センサにより回転数のカウントを開始し、伝動軸の回転数のカウント値が第一の目標回転数N1に到達したことを車軸回転センサが検出するのに起因して苗植装置を自動的に下降させる信号を出す旋回連動制御装置を設け、該旋回連動制御装置は、伝動軸の回転に対するハンドル切れ角θの関係に基づいて補正値n0を演算し、該補正値n0により前記第一の目標回転数N1を補正する構成とした。
(もっと読む)
刈取収穫機の刈取部昇降構造
【課題】刈取収穫機の刈取部昇降構造において、例えば畦際での旋回が終了して刈取部を圃場面に下降させて次の刈取行程に入る場合、刈取部の先端部分が圃場面の凸部に突っ込むような状態を少なくする。
【解決手段】刈取部4を昇降駆動する昇降機構と、人為的に操作される昇降操作具とを備える。上方に設定された上昇限度UU1及び下方に設定された下降限度DD1の範囲において、昇降操作具の操作により昇降機構を上昇側及び下降側に作動操作、昇降操作具の操作により昇降機構を停止操作する制御手段を備える。制御手段の下降限度DD1を高低に変更する変更手段を備える。
(もっと読む)
農作業車両
【課題】本発明は、畦を乗り越える圃場出入時に作業機の上昇等の複雑な操作を自動化してオペレータが操縦操作に専念出来るようにすることで、安全な圃場の出入が行えるようにすること課題とする。
【解決手段】農作業車両の操縦席6の近傍に、圃場内への侵入時に操作する圃場出入スイッチ59を設け、走行速度の設定と、PTO軸停止と、作業機の上昇、及びエンジン回転数上昇をあらかじめ設定可能な構成とし、前記圃場出入スイッチ59を入り状態にすることで、前記設定している走行速度の低速化と、PTO軸停止と、作業機の上昇、及びエンジン回転上昇を自動に制御する構成を備えたことを特徴とする農作業車の構成とする。また、圃場出入スイッチ59を変速レバー18或いはステアリングハンドル8に設けたことを特徴とする農作業車両の構成とする。
(もっと読む)
苗移植機の旋回制御装置
【課題】苗移植機の旋回時に、オペレーターの操作負担を軽減するために構成した制御装置において、旋回中に後進すると、旋回後、植付クラッチの入りと、苗植付装置の下降とのタイミングが合わない課題があった。
【解決手段】この発明は、上記課題を解決するために、コントローラ(6)は、走行車体の旋回操作に関連して、植付クラッチを切り側に、昇降機構を上昇側に、それぞれ制御し、旋回距離が、予め、苗植付装置を下降側に制御する設定値(N1)と、植付クラッチを入り側に切り替える設定値(N2)とに達すると、下降とクラッチ入りとの制御をする構成とし、前記設定値(N1)は、走行車体が、旋回中に後進を行うと、通常旋回時より速く下降タイミングが取れるように補正する制御を可能とした苗移植機の旋回制御装置である。
(もっと読む)
農作業機
【課題】 昇降操作具の操作位置に拘わらず後進上昇手段の入切り操作を任意に行うことができ、使い易い切換操作具を備えた農作業機を提供する。
【解決手段】 苗植付装置2に対する油圧シリンダ4、油圧シリンダ4を操作するもので人為的に操作される昇降操作具55、及び、油圧式無段変速装置21、油圧式無段変速装置21を操作するもので人為的に操作される変速操作具33を備える。変速操作具33が後進中立位置に操作されると苗植付装置2を上昇作動させる後進上昇手段を設け、後進上昇手段を作動させる状態と作動させない状態とに切り換える人為的切換操作具Aを、昇降操作具55とは別個に備えている。
(もっと読む)
作業車体のローリング装置
【課題】 苗植機のように作業車体の走行姿勢によって苗植付状態、乃至苗植付着姿勢が著しく変化することが多い作業形態では、車体の作業姿勢の変更制御を手動や、自動によって、その作業状態に応じて速やかに切替て対応していく必要がある。又、自動制御によって車体姿勢を変更制御する場合は、ご操作があると車体姿勢が転倒し易い形態に急傾斜されて、その修正操作が遅れて、間に合わないことがある。
【解決手段】 車体の左右傾斜を検出する傾斜センサ2に基づく自動ローリング制御に対して、手動操作具3による手動ローリング制御を優先して行わせることを特徴とする作業車体のローリング装置の構成とする。
(もっと読む)
作業機の昇降制御装置
【課題】作業機の畔際での旋回時に作業装置を昇降制御するにあたり、次の作業行程の作業開始位置を揃える。
【解決手段】走行車体に対して昇降する作業装置を設け、走行車体の旋回時における所定の第一の過程で作業装置を上昇させ、所定の第二の過程で作業装置を下降させる昇降制御手段を設ける。そして、ステアリングハンドルの操作スピードが速いときには、昇降制御手段の作業装置の下降速度を速くなるように構成する。
前記構成によると、ステアリングハンドルの操作スピードが速いと、旋回時の作業装置の昇降速度が速くなるので、次の作業行程の作業開始遅れを防止し、次の作業行程への移行を円滑にすることができる。
(もっと読む)
農機具の支持装置
【課題】 農機具の上げ下ろし作業の労力の軽減を図ることができ、しかも、作業時において、農機具を作業位置に固定する固定部分に作用する荷重を軽減することができる農機具の支持装置を提供する。
【解決手段】 ネジ式伸縮構造によって長さ方向伸縮可能に構成された操作部材25を設け、この操作部材25の長さ方向一端側をトラクタの後部に設けられた支持フレーム6に対して固定の部材に支持し、該操作部材25の長さ方向他端側を連動機構24を介して農機具15と一体回動する部材に連動連結し、前記操作部材25を伸縮させることにより連動機構24を介して農機具15が上下に回動するように構成する。
(もっと読む)
トラクタ作業機のローリング制御装置
【課題】圃場の畦際等でのトラクタ作業で操向旋回時における不安定なローリング制御状態を回避しようとする。
【解決手段】 トラクタ車体(1)に作業機(2)を装着し、車体(1)の左右傾斜角を検出する傾斜センサ(3)と、車速を検出する車速センサ(4)と、車体(1)の操向角を検出する操向センサ(5)等を有し、各センサ(3)、(4)、(5)の検出に基づいて、車体(1)に対して作業機(2)の連結姿勢を水平制御や、平行制御を行わせると共に、操向センサ(5)が一定以上の切り角を検出すると該水平制御を停止して平行制御を行わせ、この操向センサ(5)が一定以下の切り角を検出して一定時間経過すると該水平制御に復帰させる。
(もっと読む)
走行車両
【課題】ハンドル2の押し下げ荷重が比較的軽い歩行型の走行車両を提供すること。
【解決手段】エンジン5からの動力を左右一対の走行車輪7,7にそれぞれ伝達する伝動機構を収納した左右一対の伝動ケース9,9と該伝動ケース9,9を連結機構9A,9B;9A,9Bを介して上下方向に回動させて左右の走行車輪7,7をそれぞれ上下動させる左右一対のアクチュエータ15,15と左右の走行車輪7,7への伝動をそれぞれ断つ左右一対のサイドクラッチとを設け、旋回外側の走行車輪7の駆動反力で旋回外側の伝動ケース9が更に下降するように旋回外側のアクチュエータ15と伝動ケース9との連結機構9A,9Bに長穴15aと該長穴15aに係止されるシャフト9Bのピン9Baからなる遊びを持たせた。
(もっと読む)
歩行式移動作業車両の傾斜制御装置
【課題】機体の左右バランスを大きく崩すことなく、軟弱な土壌や凹凸のある圃場面を走行可能な歩行式動力散布機を提供する。
【解決手段】歩行式動力散布機11の操向操作具である左右両側に把持部を有する操縦ハンドル23L,23Rを機体フレーム13に上下動(ローリング)可能に取り付け、且つ機体フレーム13に対して左右一対の走行装置12L,12Rを独立的若しくは背反的に上下動可能に支持すると共に、前記操縦ハンドル23L,23Rの上下動操作に連動して両走行装置12L,12Rの上下動させる連係手段81を設けた。
(もっと読む)
除草機
【課題】 機体全体の大型化及びコストアップを招くことなく、株元部分の除草位置及び除草範囲を簡単かつ容易に調節して常に適確良好な除草効果を発揮できるようにする。
【解決手段】 乗用走行機体4に昇降自在に連結された前後方向に長いフレーム22に接地ソリ23と、植付け条における株間に左右側方から作用するタイン24を前後複数に並設した株間除草手段10Aと、条間除草手段10Bとを取り付けてなる除草機であって、複数のタイン24を、左右方向に位置変更固定自在で、かつ、フレーム22に対する前後方向の傾斜角度変更固定自在に構成している。
(もっと読む)
作業機
【課題】 苗植付け装置に左右傾斜に起因する浮き苗を発生しにくくしながら苗植付け装置のローリング制御を行うことができるようにする。
【解決手段】 苗植付け装置の左右傾斜角を検出する傾斜角センサ51、及び、苗植付け装置の左右傾斜の角速度を検出する角速度センサ52による検出情報を基に、制御手段50がローリング駆動機構のローリングモータ41を操作し、ローリング駆動機構が苗植付け装置を設定姿勢にローリング操作する。傾斜角センサ51又は角速度センサ52による検出値が設定不感帯から外れた場合、制御手段50が昇降シリンダ5を操作し、昇降シリンダ5が苗植付け装置を下降操作する。
(もっと読む)
乗用型苗移植機
【課題】乗用型田植機で前輪の操向操作を行うと、旋回内側の後輪を制動させて旋回を操作性良く行えるものがある。然しながら、操縦者は機体の旋回操向操作以外に、作業装置の駆動の入り切り操作や作業装置の昇降操作をしなければならず、旋回時の操向操作に専念できず、未だ、旋回操作性において課題があった。
【解決手段】左右前輪6を所定角度以上に操向操作すると苗移植作業装置3を上昇させる指令を出力して苗移植作業装置3を上昇させ、且つ、旋回内側となる後輪7のサイドクラッチIを切って該旋回内側となる後輪7の回転数の検出に基づいて走行距離算出手段にて走行距離を算出して、該走行距離に応じて苗移植作業装置3を下降させる指令を出力して苗移植作業装置3を下降させ、且つ、苗移植作業装置3を下降させる指令の出力所定時間後に線引きマーカ195を下降させる指令を出力する制御装置170を設けた乗用型苗移植機。
(もっと読む)
作業車輌における傾斜自動制御装置
【課題】 角速度センサの基準値を刻々と補正する際の演算負荷や必要なメモリ容量が小さく済み、しかも、角速度センサ出力の読み込み頻度が少なくても補正の精度が必要十分に確保される作業車輌における傾斜自動制御装置を提供する。
【解決手段】 一定時間ごとに角速度センサの出力データから現在の基準データを差し引いて差分データを求め、新しい基準データ=現在の基準データ+修正量、修正量=差分データ/(2のn乗)という演算を実行して基準データを修正するので、角速度センサの角速度0に対応する基準値が変化すると、新しい基準値に対応するレベルへ向かって基準データが演算ごとに誘導される。差分データが小さい場合は乗数nを段階的に増加させて修正量を減らすが、差分データが大きい場合は乗数nを段階的に減少させて1回あたりの修正量を増やす。
(もっと読む)
21 - 37 / 37
[ Back to top ]