
Fターム[2B304PA03]の内容
Fターム[2B304PA03]に分類される特許
1 - 20 / 41
作業車両
【課題】
操舵部材を直進位置に保持して自動直進走行を行なうことができると共に、機体が傾斜すると自動的に進行方向を修正することのできる作業車両を提供する。
【解決手段】
走行車体2に操舵輪10を設け、操舵輪10を操作する操舵部材34を設け、走行車体2に機体の傾斜を検出する傾斜検知部材101を設け、傾斜検知部材101が左右方向の傾斜を検知すると操舵部材34を操作して走行車体2の進行方向を補正する作業車両において、操舵部材34を操作自在な自由状態と、操舵部材34を直進位置に保持する保持状態に切り替える操作切替部材103を設け、操作切替部材103を保持状態に操作していても傾斜検知部材101が機体の傾斜を検知すると、操舵部材34の保持を解除して傾斜方向の反対側に操作する構成とする。
(もっと読む)
電動農作業車のモータ制御装置

【課題】走行動力及び作業動力を発生させる動力用電動モータと、油圧ポンプを駆動させる油圧ポンプ用電動モータとをそれぞれ別々に備える2モータ方式の電動農作業車において、バッテリ消費を抑える。
【解決手段】走行機体1に昇降自在に連結される植付作業機3と、該植付作業機3を昇降させる作業機昇降用油圧シリンダ4と、該作業機昇降用油圧シリンダ4に圧油を供給する油圧ポンプ15と、該油圧ポンプ15を駆動させる油圧ポンプ用電動モータ5Bと、走行動力及び作業動力を発生させる動力用電動モータ5Aと、動力用電動モータ5A及び油圧ポンプ用電動モータ5Bの駆動を制御するモータ制御装置23と、を備える電動乗用田植機において、モータ制御装置23は、植付作業機3の昇降動作固定状態を検出すると共に、植付作業機3が昇降動作固定状態のときは、油圧ポンプ用電動モータ5Bの駆動を休止させる。
(もっと読む)
田植機
【課題】田植機において、ピッチング角等に基づく補正を適切に行い、良好な昇降制御性能を得ることができる構成を提供する。
【解決手段】制御部は、フロートの揺動角の検出値を、ピッチング角に基づいて補正して(ステップS106)、植付部を昇降制御するように構成されている。そして制御部は、ピッチング角の変化速度又は加速度が大きい場合には、前記補正を行わない。即ち、車体が急激なピッチング挙動を示すときには、ピッチング角による補正の影響を小さくすることにより、意図しない昇降制御が行われてしまうことを防止し、植付部の不必要な高さ変動を抑えることができる。
(もっと読む)
田植機
【課題】植付部の昇降制御の追従性を向上させた田植機を提供する。
【解決手段】田植機は、植付部と、フロートセンサと、制御部と、を備えている。植付部は、地面に接触可能なフロートを備える。フロートセンサは、フロートの揺動角を検出する。制御部は、フロートセンサの出力値の微分値を制御量としたPID制御(ステップS103)により、植付部を昇降制御する。また制御部は、フロートセンサが検出したフロートの位置と、前記フロートの位置の目標値と、の差をフロートセンサの検出値に基づいて修正する(ステップS104)。
(もっと読む)
セミクローラ型作業車両
【課題】セミクローラ型作業車両において、左右クローラ走行装置を持ち上げ支持し、泥の落下を防止しながら路上走行をすることを課題とする。
【解決手段】作業車両の機体前側部には左右前輪を、機体後部には左右クローラ走行装置を設けたセミクローラ型作業車両において、機体後部に作業機昇降用のリフトアーム及び作業機連結用の三点リンク機構を設け、該三点リンク機構の左右ロワーリンクに、前後方向に長い左右持ち上げ棒を取り付け、左右ロワーリンクの前端部よりも前方へ突出する左右持ち上げ棒の前側部位に左右接地輪体を設け、左右リフトアームにより左右ロワーリンクを上方へ回動させると、左右持ち上げ棒の左右接地輪体により左右クローラ走行装置を地面から浮上させて支持することを特徴とするセミクローラ型作業車両とする。
(もっと読む)
苗移植機
【課題】
後輪ローリング機構をシリンダで制御して、植付作業時や旋回作業時に機体の走行姿勢が作業に適した形態となる姿勢制御装置を設けた苗移植機を提供する。
【解決手段】
車体4の後部に中央回動軸42を中心に左右方向に回動するローリング機枠41を設け、ローリング機枠41の両端部に後輪3,3に回転駆動力を供給する後輪伝動ケース8,8を設け、ローリング機枠41を回動させる回動アクチュエータ9を設け、ハンドル1の操舵角度を検出する操舵角度検出部材7を設け、操舵角度検出部材7の検出した操舵角度から旋回内側を判別して回動アクチュエータ9を伸張または収縮させて車体4の旋回内側が低位となる側にローリング機枠41を回動させて傾斜姿勢にする構成とした。
(もっと読む)
苗移植機
【課題】作業者が苗植付装置の入切や苗植付部の昇降などを操作することなく、作業者の労力の軽減が図れると共に、苗の植付作業の効率が向上する苗移植機の提供である。
【解決手段】左右前輪10及び左右後輪11と、フレーム15と、左右前輪10を操向操作するハンドル34と、ハンドル34の操向角度を検出する切れ角センサ93と、フレーム15の後方に昇降リンク装置3を介して昇降可能に連結し、苗載台51と苗植付装置52とを備えた苗植付部4と、苗植付装置52の作業状態切替レバー68と、昇降リンク装置3の油圧シリンダ46や油圧バルブ80などの昇降手段と、切れ角センサ93の値に応じて昇降手段による苗植付部4の昇降及び切替レバー68の切替を制御する制御装置100とを設けた苗移植機である。ハンドル操作に苗植付部4の昇降と苗植付装置52の入切が連動するため、作業者が苗植付装置52の入切をする必要がなく、労力が軽減する。
(もっと読む)
農作業機
【課題】 本発明は、機体の旋回制御を、簡単な構成で行えるようにすること及び様々な旋回形態に対応できるようにすることを課題とする。
【解決手段】 機体の畦際旋回時に農作業装置の作動を停止し、作業開始位置で自動的に農作業装置の作動を開始させる制御装置を設けた農作業機において、農作業装置の作動を入切する操作レバー(19)と、該操作レバー(19)を各々の操作位置に位置決めする位置決め機構と、操作レバー(19)を作動させるレバーモータ(99)と、位置決め機構を位置決めしない状態に解除する位置決め解除機構とを設け、レバーモータ(99)から操作レバー(19)への作動連繋機構に融通機構(132a)を設け、前記作業開始位置で、レバーモータ(99)を駆動することにより、位置決め解除機構を作動させると共に操作レバー(19)を作業位置(A)に作動させる構成とした。
(もっと読む)
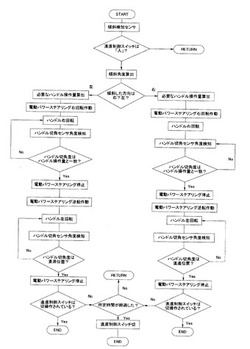
乗用型苗移植機
【課題】 乗用型苗移植機において、旋回時に、操縦者は機体の旋回操向操作以外に、作業装置の駆動の入り切り操作や作業装置の上昇・下降操作をしなければならず、旋回時の操向操作に専念できず、未だ、旋回操作性の点において課題があった。
【解決手段】 ステアリングハンドルにて操向操作される左右前輪と、左右後輪を設けた走行車両に、苗移植作業装置を昇降自在に装着した乗用型苗移植機において、走行距離算出手段にて苗移植作業装置を上昇させる指令を出力してからの走行距離を算出して、該走行距離に応じて制御することにより、先ず苗移植作業装置が下降する指令を出力し、その後に線引きマーカを下降させる自動旋回モードを設けた。
(もっと読む)
作業車
【課題】作業装置の強制上昇時にはエンジンストールを招くことがなくエンジンの回転速度を低減する作業車を構成する。
【解決手段】作業装置の強制的な昇降を行う強制昇降制御手段63を備え、メモリ53に記憶された目標回転速度で作業を行っている際に、強制昇降制御手段63による強制上昇制御が行われた場合には、この強制上昇制御の開始から第1遅延時間が経過した時点で、エンジンの回転速度を人為的に設定される指示回転速度まで減ずる回転速度変更手段52を備え、選択スイッチ39の操作に基づいて回転速度変更手段52によるエンジンの回転速度の低減の許容と阻止とを選択する制御選択手段68を備えた。
(もっと読む)
農作業機のリモコンシステム
【課題】トラクタに装着して農作業を行う作業機のためのリモコンの操作ボックスを部品の交換なしに異なる作業機に対応できる農作業機のリモコンシステムを提供することを目的とする。
【解決手段】トラクタに装着して農作業を行う作業機と、タッチスクリーンであるタッチパネル部41に表示された操作表示画面上の操作スイッチ表示に触れて操作する操作ボックス10とを備え、作業機は、当該作業機に設けられた出力機器30と、操作スイッチ表示の操作による操作信号を受信しこれに基づき出力機器30を制御する制御部21とを有し、操作表示画面は、作業機の機種毎に変更して、異なる作業機の操作を可能とする。
(もっと読む)
農作業機
【課題】ローリングスプリング20と油圧ローリングシリンダ17によるロ−リング姿勢制御を自動的に切り替えることができる農作業機を提供することである。
【解決手段】所定時間内に走行部傾斜角センサ24の検出する傾斜角度の変化が所定範囲内であると、油圧ローリングシリンダ17が駆動制御しない状態として、緩衝部材20による苗植付装置6の姿勢変更を行い、前記傾斜角度の変化が所定範囲を超えると油圧ローリングシリンダ17によるロ−リング姿勢制御を行うように制御装置27がコントロールするので、苗植付装置6の姿勢変更を自動的に行うことができる。
(もっと読む)
作業車両
【課題】圃場の路面状況を適確に把握できると共に、圃場の状態に応じた旋回及び走行が可能で作業効率や操作性が向上する作業車両の提供である。
【解決手段】走行機体Tの後部に装着した作業機Rと、後輪3のブレーキと、前輪2の操作ハンドル7と、前方の路面状況を撮影するCCDカメラ15と、前方の障害物までの距離を検出する超音波センサ17と、旋回時期を報知するブザー50と、CCDカメラ15の画像から前方の障害物までの距離を算出し、超音波センサ17による検出距離とほぼ同じである場合に、旋回までの走行距離を算出して旋回時にブザー50などにより報知すると共にハンドル7操作により走行機体Tが旋回すると作業機Rを上昇させて旋回内側の後輪3のブレーキを作動させ、旋回が終了するとCCDカメラ15の画像から未耕地と既耕地を判断して作業機Rの下降位置を判定し作業機Rを下降させる制御を行う制御装置とを設けた作業車両である。
(もっと読む)
作業車両
【課題】
本発明の課題は、旋回時の車速が速く設定されている場合にあっても、植付作業部をタイミング良く下降させて畦に対する干渉や空植えを防止することにある。
【解決手段】
この発明は、操向ハンドルの左右旋回操作によって前輪が左又は右に操向操作されると、旋回外側の後輪の回転速度に対して旋回内側の後輪の回転速度が所定速度以下になったとき旋回内側のサイドクラッチを強制的に「入」にして旋回内側の後輪を所定の回転量だけ強制駆動する旋回制御手段(TC)を備えた作業車両において、機体旋回時に作業部を上昇させ、機体旋回開始後、所定角度旋回すると作業部を所定位置に下降させる作業部昇降制御手段(UD)を備え、車速が速く設定されている場合には、作業部の下げ速度を増速制御する下降速度制御手段(DV)を設けてあることを特徴とする。
(もっと読む)
作業車両の制御装置
【課題】安価で、しかも作業機のローリング制御をタイミング良く行うことができるトラクタなどの作業車両を提供すること。
【解決手段】走行車両1に連結する作業機3が、走行車両1の旋回時に作業機3を上昇させないで圃場上に降ろしたまま旋回して作業する圃場の代かき作業機3である場合、このような作業時には、走行車両1は圃場の水平面上を比較的高速で走行しながら旋回するため遠心力が作業機3に作用し、スロープセンサ10はその遠心力によって、該センサ10中の粘性液が傾き、機体が傾斜したと判定してしまい、水平シリンダ16を伸縮し、作業機3が水平からずれてしまうことがある。そこで、ハンドル切れ角により旋回径を算出し、その旋回径と車速によりスロープセンサ10に働く遠心力によるスロープセンサ値の変化を補正値としてスロープセンサ検出値に加減算することで、実際の走行車両1の傾斜を判断でき、作業機3が水平となる。
(もっと読む)
トラクタの旋回制御装置
【課題】枕地における斜め方向への耕耘土の跳ね飛ばしを少なくして、耕耘面の仕上がりを良好に保持することができると共に、旋回時の車速の大小に拘わらず前輪倍速装置が作動するまでに機体が走行する距離を一定とし、最適な旋回タイミングを見つけ出し易くする。
【解決手段】前輪Zが操舵されると、作業機21を上昇させると共に、前輪Zを倍速駆動させて機体の旋回を行うトラクタTの制御装置22において、前輪Zが所定の操舵角以上に操舵されたことを検出するのに伴って作業機21を上昇させる制御を開始すると共に、この上昇制御が開始された後、機体が設定距離以上に走行したことを検出するのに伴って前輪Zの倍速駆動を開始する。
(もっと読む)
田植機
【課題】 圃場の往復作業走行の折返し部に来た際に、植付部の取扱いを要することなく機体を旋回することができるとともに、一連の動作を継続することが可能となる田植機を提供することにある。
【解決手段】 旋回操作の検出に応じて圃場を旋回走行しうる機体と、この機体に対して昇降可能に支持されてその作業位置まで下降して植付作業をする植付部と、この植付部の上昇、下降、植付稼動、植付停止の各動作を制御する制御部とを備えた田植機において、上記制御部は、畦際まで前進して停車し、植付部を非作業位置に上昇し、後退して旋回するバック旋回時に、機体走行中の旋回操作の検出に応じて作業位置への下降、植付稼動までの一連の動作を制御する旋回連動制御を行う構成とした。
(もっと読む)
旋回連動制御式の作業車両
【課題】圃場の状況や走行の状況その他の変動によって対地作業装置の再稼動前に、機体の旋回位置の修正等の異常対応操作が必要なとなった場合に、オートダウン制御の解除等の煩わしい操作を強いられることなく、異常状況の対応が可能となる旋回連動制御式の作業車両を提供する。
【解決手段】旋回連動制御式の作業車両は、作業用高さと旋回用高さに切替え可能に装荷した対地作業装置(R)と、この対地作業装置(R)について機体の旋回開始と対応して旋回用高さに切替えるオートリフト制御および旋回終了と対応して作業用高さに切替えるオートダウン制御を行う制御部(21)とを備えて構成され、上記制御部(21)は、旋回開始後における機体の位置が対地作業の所定の開始位置の範囲内であって、同じく機体の走行車速が所定速度以上である場合に限り、上記オートダウン制御を実施するものである。
(もっと読む)
走行車両
【課題】 本発明は、機体が小回り旋回性を維持しながら、旋回後半には旋回後のための位置合わせが容易に行えるようにすることを課題とする。
【解決手段】 ステアリング機構により前輪が直進状態から操舵状態へ操向されるのに連動して旋回内側のサイドクラッチを断続的に入/切し、前輪が操舵状態から直進状態へ戻るのに連動して旋回内側のサイドクラッチを常時入状態にする旋回連動機構と、走行車体の旋回中において、前輪の向きが操舵状態から直進状態側へ戻されるのを旋回角度センサが検出するのに連動して、旋回連動機構により断続的に入/切する周期における入状態の割合を大きく変更し、以降、前輪が直進状態へ戻るまで前記入状態の割合を小さく変更しない制御装置を備えた走行車両とした。
(もっと読む)
トラクタ
【課題】耕深を維持するための適正な車速、又は車速を維持するための適正な耕深を容易に認識可能とする。
【解決手段】コモンレールを備えたエンジンと該エンジンの制御を行うECU、及び作業機を搭載したトラクタにおいて、該作業機により耕す深さを設定する耕深設定手段、該耕深設定手段の機能を入り状態とする自動耕深スイッチ、該自動耕深スイッチが入り状態のときに耕深優先又は車速優先を選択する選択スイッチを設け、前記自動耕深スイッチが入り状態のときに前記選択スイッチにより耕深優先又は車速優先のいずれか一方が選択された状態で作業機を駆動して作業走行が開始されると、前記ECUは負荷率を検出して本機側の制御装置に送信し、該制御装置は耕深を維持するための車速、又は車速を維持するための耕深を算出してモニターに表示することを特徴とするトラクタの構成とする。
(もっと読む)
1 - 20 / 41
[ Back to top ]