
電動農作業車のモータ制御装置
【課題】走行動力及び作業動力を発生させる動力用電動モータと、油圧ポンプを駆動させる油圧ポンプ用電動モータとをそれぞれ別々に備える2モータ方式の電動農作業車において、バッテリ消費を抑える。
【解決手段】走行機体1に昇降自在に連結される植付作業機3と、該植付作業機3を昇降させる作業機昇降用油圧シリンダ4と、該作業機昇降用油圧シリンダ4に圧油を供給する油圧ポンプ15と、該油圧ポンプ15を駆動させる油圧ポンプ用電動モータ5Bと、走行動力及び作業動力を発生させる動力用電動モータ5Aと、動力用電動モータ5A及び油圧ポンプ用電動モータ5Bの駆動を制御するモータ制御装置23と、を備える電動乗用田植機において、モータ制御装置23は、植付作業機3の昇降動作固定状態を検出すると共に、植付作業機3が昇降動作固定状態のときは、油圧ポンプ用電動モータ5Bの駆動を休止させる。
【解決手段】走行機体1に昇降自在に連結される植付作業機3と、該植付作業機3を昇降させる作業機昇降用油圧シリンダ4と、該作業機昇降用油圧シリンダ4に圧油を供給する油圧ポンプ15と、該油圧ポンプ15を駆動させる油圧ポンプ用電動モータ5Bと、走行動力及び作業動力を発生させる動力用電動モータ5Aと、動力用電動モータ5A及び油圧ポンプ用電動モータ5Bの駆動を制御するモータ制御装置23と、を備える電動乗用田植機において、モータ制御装置23は、植付作業機3の昇降動作固定状態を検出すると共に、植付作業機3が昇降動作固定状態のときは、油圧ポンプ用電動モータ5Bの駆動を休止させる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、電動モータの動力で動作する電動農作業車のモータ制御装置に関する。
【背景技術】
【0002】
近年、農作業車の電動化が提案されている。例えば、特許文献1には、電動モータの動力を車輪及び作業機に伝達するように構成した農作業車(乗用田植機)が示されている。そして、この種の電動農作業車としては、走行動力及び作業動力を発生させる動力用電動モータと、油圧ポンプを駆動させる油圧ポンプ用電動モータとをそれぞれ別々に備える2モータ方式や、1つの電動モータを動力用電動モータと油圧ポンプ用電動モータとに兼用する1モータ方式が知られている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2007−189912号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
2モータ方式の電動農作業車は、動力用電動モータの停止制御にもとづいて機体走行を停止させた状態であっても、油圧ポンプ用電動モータの駆動を継続することにより、作業機昇降用油圧シリンダを動作させて作業機を任意に昇降できるという利点があるものの、油圧ポンプ用電動モータの駆動によってバッテリの消費が増大するおそれがあった。
【課題を解決するための手段】
【0005】
本発明は、上記の如き実情に鑑みこれらの課題を解決することを目的として創作されたものであって、走行機体と、該走行機体に昇降自在に連結される作業機と、該作業機を昇降させる作業機昇降用油圧シリンダと、該作業機昇降用油圧シリンダに圧油を供給する油圧ポンプと、該油圧ポンプを駆動させる油圧ポンプ用電動モータと、走行動力及び作業動力を発生させる動力用電動モータと、動力用電動モータ及び油圧ポンプ用電動モータの駆動を制御するモータ制御装置と、を備える電動農作業車において、前記モータ制御装置は、作業機の昇降動作固定状態を検出すると共に、作業機が昇降動作固定状態のときは、油圧ポンプ用電動モータの駆動を休止させることを特徴とする。
また、前記油圧ポンプから供給される圧油でステアリングハンドル操作をアシストする油圧式パワーステアリング装置を備え、前記モータ制御装置は、作業機が昇降動作固定状態であっても、ステアリングハンドルが操作されたときは、油圧ポンプ用電動モータを駆動させることを特徴とする。
また、前記モータ制御装置は、作業機が昇降動作固定状態であっても、ステアリングハンドルが操作されたときは、油圧ポンプ用電動モータを駆動させるにあたり、該油圧ポンプ用電動モータの駆動速度をステアリングハンドルの切れ角の増加に応じて増速させることを特徴とする。
【発明の効果】
【0006】
請求項1の発明によれば、走行動力及び作業動力を発生させる動力用電動モータと、油圧ポンプを駆動させる油圧ポンプ用電動モータとをそれぞれ別々に備える2モータ方式の電動農作業車でありながら、作業機が昇降動作固定状態のときは、油圧ポンプ用電動モータの駆動を休止させるので、バッテリ消費を抑えることができる。
また、請求項2の発明によれば、作業機が昇降動作固定状態であっても、ステアリングハンドルが操作されたときは、油圧ポンプ用電動モータを駆動させるので、機体旋回時には、油圧式パワーステアリング装置によるステアリングハンドル操作のアシストを有効にすることができる。一方、ステアリングハンドルが操作されない機体直進時には、油圧式パワーステアリング装置によるアシストが無効となってハンドル操作が重くなる可能性があるが、それに伴いフラツキが抑制されて直進性が向上するという利点がある。
また、請求項3の発明によれば、油圧ポンプ用電動モータの駆動速度をステアリングハンドルの切れ角の増加に応じて増速させるので、油圧式パワーステアリング装置によるステアリングハンドル操作のアシストを適切に実行することができるだけでなく、油圧ポンプ用電動モータの駆動速度をステアリングハンドルの切れ角にかかわらず一気に定格速度まで上昇させる場合に比べてバッテリ消費を抑えることができる。
【図面の簡単な説明】
【0007】
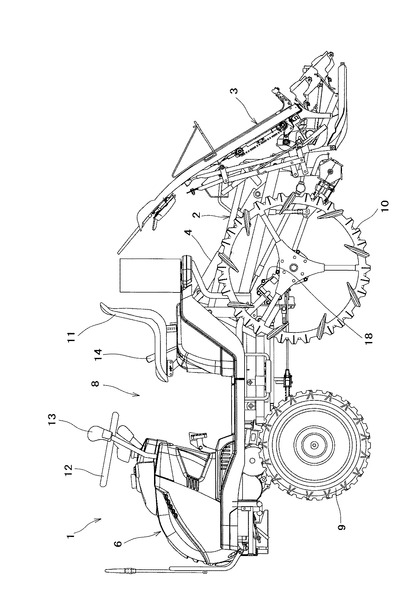
【図1】電動乗用田植機の左側面図である。
【図2】ボンネットを取り外した走行機体の上部を示す斜視図である。
【図3】カバー類を取り外した走行機体の上部を示す斜視図である。
【図4】モータ搭載部を示す斜視図である。
【図5】モータ搭載部を示す平面図である。
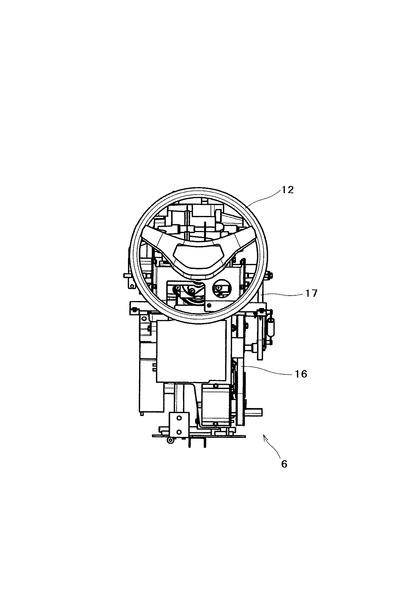
【図6】ステアリングハンドルやカバー類を取り外したモータ搭載部の平面図である。
【図7】モータ搭載部の左側面図である。
【図8】モータ搭載部の右側面図である。
【図9】ステアリング操作機構の概略構成を示す左側面図である。
【図10】モータ制御装置の入出力を示すブロック図である。
【図11】ハンドル回転角とポンプ回転数の関係を示すグラフである。
【図12】ポンプモータ制御の制御手順を示すフローチャートである。
【発明を実施するための形態】
【0008】
以下、本発明の実施の形態について、図面に基づいて説明する。図1において、1は電動乗用田植機(電動農作業車)の走行機体であって、該走行機体1の後部には、昇降リンク機構2を介して植付作業機3が連結されている。植付作業機3は、下降接地状態で植付作業を行うように構成されており、走行機体1と昇降リンク機構2との間に介設される作業機昇降用油圧シリンダ4の伸縮に応じて昇降するようになっている。
【0009】
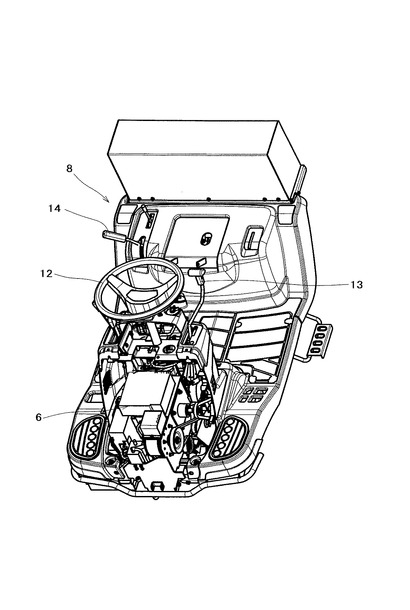
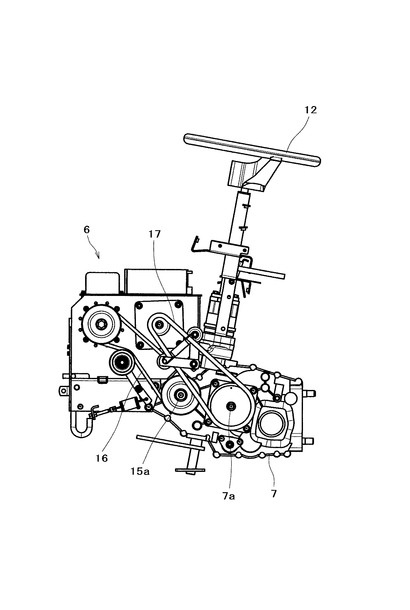
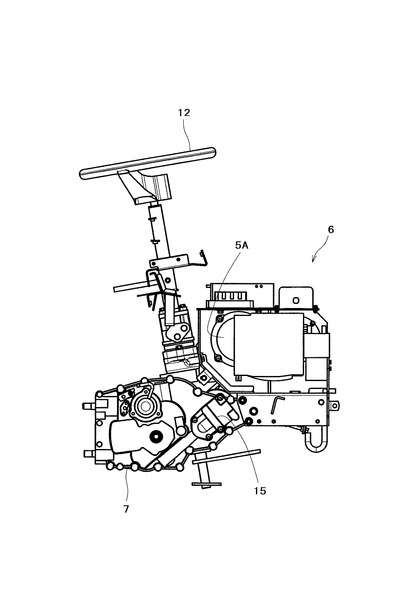
走行機体1は、電動モータ5が搭載されるモータ搭載部6、動力用電動モータ5Aの動力を変速するミッションケース7、オペレータが乗車する操作部8、操舵輪及び駆動輪を兼ねる前輪9、駆動輪である後輪10などを備える乗用型の四輪車両であり、操作部8には、オペレータが座る運転座席11、前輪9を操舵するステアリングハンドル12、走行変速操作を行う主変速レバー13、植付作業機3の昇降操作や植付クラッチの断続操作を行う作業機操作レバー14などが設けられている。
【0010】
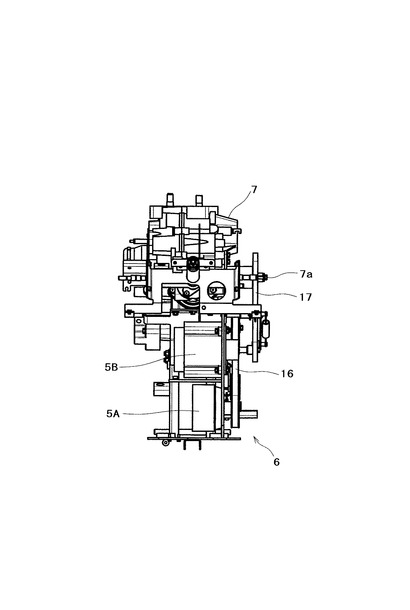
図2〜図8に示すように、モータ搭載部6には、2つの電動モータ5A、5Bが搭載されている。一方は、走行動力及び作業動力を発生させる動力用電動モータ5Aであり、他方は、油圧ポンプ15を駆動させる油圧ポンプ用電動モータ5Bである。そして、油圧ポンプ用電動モータ5Bの動力は、伝動ベルト16を介して油圧ポンプ15のポンプ軸15aに入力され、動力用電動モータ5Aの動力は、伝動ベルト17を介してミッションケース7の入力軸7aに入力される。
【0011】
尚、図示は省略するが、ミッションケース7内には、入力軸7aの他に、植付伝動軸、走行伝動軸などの伝動軸が設けられている。動力用電動モータ5Aから入力軸7aに入力された動力は、株間変速機構を介して植付伝動軸に伝動されると共に、トルクリミッタ及び植付クラッチを介して、植付伝動軸から植付PTO軸に伝動される。そして、植付PTO軸から取り出される動力は、ミッションケース7外の伝動機構を経由して植付作業機3に伝動される。
【0012】
また、動力用電動モータ5Aから入力軸7aに入力された動力は、副変速機構を介して走行伝動軸に伝動される。走行伝動軸に伝動された動力は、前輪差動機構を介して左右の前輪駆動軸に伝動されると共に、走行PTO軸に伝動される。そして、走行PTO軸から取り出される動力は、ミッションケース7外の伝動機構を経由してリヤアクスルケース18に伝動される。
【0013】
油圧ポンプ用電動モータ5Bにより駆動される油圧ポンプ15は、前述した作業機昇降用油圧シリンダ4や、油圧式パワーステアリング装置19に対して圧油供給を行う。作業機昇降用油圧シリンダ4は、作業機操作レバー14の操作にもとづく油圧バルブの切り換え動作に応じて伸縮するようになっている。例えば、本実施形態の作業機操作レバー14は、「上昇」、「固定」、「自動昇降(下降)」、「植付」の4つの操作ポジションを有し、「上昇」ポジションでは、作業機昇降用油圧シリンダ4が作業機上昇方向に動作すると共に、植付クラッチが切り状態となり、「固定」ポジションでは、作業機昇降用油圧シリンダ4が停止すると共に、植付クラッチが切り状態となり、「自動昇降(下降)」ポジションでは、作業機昇降用油圧シリンダ4が自動制御状態(感知フロート20の上下動に応じて自動的に伸縮制御される状態)になると共に、植付クラッチが切り状態となり、「植付」ポジションでは、作業機昇降用油圧シリンダ4が自動制御状態になると共に、植付けクラッチが入り状態となる。
【0014】
尚、特許請求の範囲に記載した「昇降動作固定状態」とは、油圧ポンプ15からの圧油供給が停止しても、植付作業機3が現在の昇降位置を維持することができる状態を意味し、本実施形態では、作業機操作レバー14を「固定」ポジションとした状態がこれに相当する。
【0015】
図9に示すように、油圧式パワーステアリング装置19は、例えばトルクジェネレータ19aを用いて構成される。トルクジェネレータ19aは、ハンドル軸12aを介してステアリングハンドル12から入力される小さなトルクを、油圧により大きなトルクに変換し、このトルクで減速機構21やピットマンアーム22を動作させて前輪9の操舵を行うものである。尚、トルクジェネレータ19aは、油圧ポンプ15からの圧油供給が停止した状態であっても、ステアリングハンドル12による前輪9の操舵を許容するが、この状態では油圧によるアシストが無効になるので、ハンドル操作の操作荷重が増大する。
【0016】
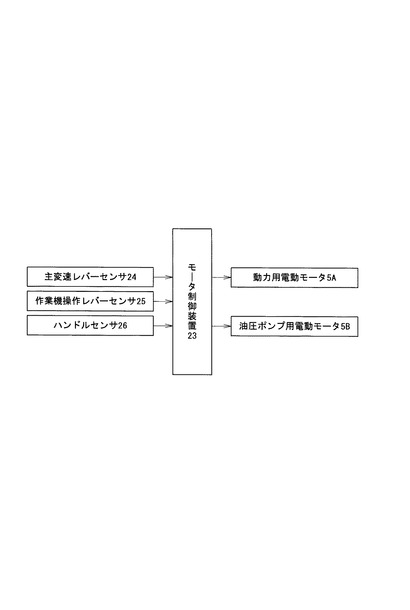
図10に示すように、走行機体1にはマイコンなどを用いて構成されるモータ制御装置23が設けられている。モータ制御装置23の入力側には、主変速レバー13の操作位置を検出する主変速レバーセンサ24、作業機操作レバー14の操作位置を検出する作業機操作レバーセンサ25、ステアリングハンドル12の回転角を検出するハンドルセンサ26などが接続される一方、モータ制御装置23の出力側には、動力用電動モータ5Aや油圧ポンプ用電動モータ5Bが接続されている。
【0017】
モータ制御装置23は、制御用プログラムとして、主変速レバー13の操作位置に応じて動力用電動モータ5Aの駆動を制御する動力モータ制御と、作業機操作レバー14の操作位置やステアリングハンドル12の操作に応じて油圧ポンプ用電動モータ5Bの駆動を制御するポンプモータ制御を備えている。以下、本発明の特徴であるポンプモータ制御の概要及び具体的な制御手順について説明する。尚、動力モータ制御では、従前と同様の制御を行うので、具体的な制御手順の説明は省略する。
【0018】
本発明の実施形態に係るモータ制御装置23は、油圧ポンプ用電動モータ5Bの駆動を制御するにあたり、植付作業機3の昇降動作固定状態を検出すると共に、植付作業機3が昇降動作固定状態のときは、油圧ポンプ用電動モータ5Bの駆動を休止させる。例えば、作業機操作レバー14の操作位置が「固定」ポジションであるとき、植付作業機3が昇降動作固定状態であると判断し、油圧ポンプ用電動モータ5Bの駆動を休止させる。このようにすると、走行動力及び作業動力を発生させる動力用電動モータ5Aと、油圧ポンプ15を駆動させる油圧ポンプ用電動モータ5Bとをそれぞれ別々に備える2モータ方式の電動農作業車でありながら、植付作業機3が昇降動作固定状態のときは、油圧ポンプ用電動モータ5Bが休止するので、バッテリ消費を抑えることが可能になる。
【0019】
また、モータ制御装置23は、植付作業機3が昇降動作固定状態であっても、ステアリングハンドル12が操作されたときは、油圧ポンプ用電動モータ5Bを駆動させる。このようにすると、植付作業機3が昇降動作固定状態のとき油圧ポンプ用電動モータ5Bの駆動を休止させるものでありながら、機体旋回時には、油圧式パワーステアリング装置19によるステアリングハンドル操作のアシストを有効にすることができる。一方、ステアリングハンドル12が操作されない機体直進時には、油圧式パワーステアリング装置19によるアシストが無効となってハンドル操作が重くなる可能性があるが、それに伴いフラツキが抑制されて直進性が向上するという利点がある。
【0020】
また、モータ制御装置23は、植付作業機3が昇降動作固定状態であっても、ステアリングハンドル12が操作されたときは、油圧ポンプ用電動モータ5Bを駆動させるにあたり、該油圧ポンプ用電動モータ5Bの駆動速度をステアリングハンドル12の切れ角(以下、適宜ハンドル回転角という。)の増加に応じて増速させる。例えば、図11に示すように、ハンドル回転角θが0゜〜所定の角度θ1までの範囲では、油圧ポンプ用電動モータ5Bの駆動休止状態を維持し、ハンドル回転角θが所定の角度θ1〜θ2までの範囲(以下、適宜範囲Aという。)では、ハンドル回転角θの増加に応じて油圧ポンプ用電動モータ5Bの駆動速度を緩やかに増速させ、ハンドル回転角θが所定の角度θ2〜θ3までの範囲(以下、適宜範囲Bという。)では、ハンドル回転角θの増加に応じて油圧ポンプ用電動モータ5Bの駆動速度を急激に増速させる。このようにすると、油圧式パワーステアリング装置19によるステアリングハンドル操作のアシストを適切に実行することができるだけでなく、油圧ポンプ用電動モータ5Bの駆動速度をステアリングハンドル12の切れ角にかかわらず一気に定格速度まで上昇させる場合に比べてバッテリ消費を抑えることができる。
【0021】
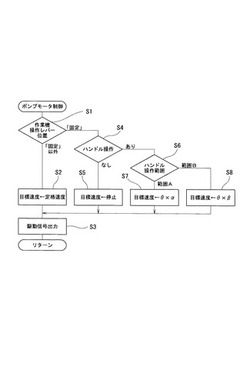
図12は、ポンプモータ制御の制御手順を示すフローチャートである。
この図に示すように、ポンプモータ制御では、まず、作業機操作レバー14の操作位置を判断する(S1)。ここで、作業機操作レバー14の操作位置が「固定」ポジション以外の場合は、油圧ポンプ用電動モータ5Bの目標駆動速度に所定の定格速度をセットすると共に(S2)、該目標駆動速度に応じたモータ駆動信号を油圧ポンプ用電動モータ5Bに出力する(S3)。一方、作業機操作レバー14の操作位置が「固定」ポジションの場合は、ステアリングハンドル12の操作を判断し(S4)、ここで、ステアリングハンドル12の操作がないと判断した場合は(ハンドル操作角θがθ1以下)、油圧ポンプ用電動モータ5Bの目標駆動速度に停止速度をセットし(S5)、油圧ポンプ用電動モータ5Bの駆動を停止させる(S3)。一方、ステアリングハンドル12の操作がありと判断した場合は、ハンドル操作角θの大小を判断し(S6)、ここで、ハンドル操作角θが小さいと判断した場合は(ハンドル操作角θが範囲Aに含まれる)、現在のハンドル操作角θに所定のゲインαを乗じた値を目標駆動速度にセットし(S7)、油圧ポンプ用電動モータ5Bを低速で駆動させる(S3)。また、ハンドル操作角θが大きいと判断した場合は(ハンドル操作角θが範囲Bに含まれる)、現在のハンドル操作角θに所定のゲインβ(β>α)を乗じた値を目標駆動速度にセットし(S8)、油圧ポンプ用電動モータ5Bを中速又は高速で駆動させる(S3)。
【0022】
叙述の如く構成された本実施形態によれば、走行機体1と、該走行機体1に昇降自在に連結される植付作業機3と、該植付作業機3を昇降させる作業機昇降用油圧シリンダ4と、該作業機昇降用油圧シリンダ4に圧油を供給する油圧ポンプ15と、該油圧ポンプ15を駆動させる油圧ポンプ用電動モータ5Bと、走行動力及び作業動力を発生させる動力用電動モータ5Aと、動力用電動モータ5A及び油圧ポンプ用電動モータ5Bの駆動を制御するモータ制御装置23と、を備える電動乗用田植機において、モータ制御装置23は、植付作業機3の昇降動作固定状態を検出すると共に、植付作業機3が昇降動作固定状態のときは、油圧ポンプ用電動モータ5Bの駆動を休止させるので、バッテリ消費を抑えることができる。
【0023】
また、油圧ポンプ15から供給される圧油でステアリングハンドル操作をアシストする油圧式パワーステアリング装置19を備え、モータ制御装置23は、植付作業機3が昇降動作固定状態であっても、ステアリングハンドル12が操作されたときは、油圧ポンプ用電動モータ5Bを駆動させるので、機体旋回時には、油圧式パワーステアリング装置19によるステアリングハンドル操作のアシストを有効にすることができる。一方、ステアリングハンドル12が操作されない機体直進時には、油圧式パワーステアリング装置19によるアシストが無効となってハンドル操作が重くなる可能性があるが、それに伴いフラツキが抑制されて直進性が向上するという利点がある。
【0024】
また、モータ制御装置23は、植付作業機3が昇降動作固定状態であっても、ステアリングハンドル12が操作されたときは、油圧ポンプ用電動モータ5Bを駆動させるにあたり、該油圧ポンプ用電動モータ5Bの駆動速度をステアリングハンドル12の切れ角の増加に応じて増速させるので、油圧式パワーステアリング装置19によるステアリングハンドル操作のアシストを適切に実行することができるだけでなく、油圧ポンプ用電動モータ5Bの駆動速度をステアリングハンドル12の切れ角にかかわらず一気に定格速度まで上昇させる場合に比べてバッテリ消費を抑えることができる。
【0025】
尚、本発明は、前記実施形態に限定されないことは勿論であって、特許請求の範囲内において適宜変更が可能であることは言うまでもない。例えば、前記実施形態では、本発明に係る電動農作業車として電動乗用田植機を例示したが、電動乗用田植機以外の電動農作業車(例えば、電動乗用管理機)でも本発明を適用できることができる。
【符号の説明】
【0026】
1 走行機体
3 植付作業機
4 作業機昇降用油圧シリンダ
5A 動力用電動モータ
5B 油圧ポンプ用電動モータ
12 ステアリングハンドル
13 主変速レバー
14 作業機操作レバー
15 油圧ポンプ
19 油圧式パワーステアリング装置
23 モータ制御装置
24 主変速レバーセンサ
25 作業機操作レバーセンサ
26 ハンドルセンサ
【技術分野】
【0001】
本発明は、電動モータの動力で動作する電動農作業車のモータ制御装置に関する。
【背景技術】
【0002】
近年、農作業車の電動化が提案されている。例えば、特許文献1には、電動モータの動力を車輪及び作業機に伝達するように構成した農作業車(乗用田植機)が示されている。そして、この種の電動農作業車としては、走行動力及び作業動力を発生させる動力用電動モータと、油圧ポンプを駆動させる油圧ポンプ用電動モータとをそれぞれ別々に備える2モータ方式や、1つの電動モータを動力用電動モータと油圧ポンプ用電動モータとに兼用する1モータ方式が知られている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2007−189912号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
2モータ方式の電動農作業車は、動力用電動モータの停止制御にもとづいて機体走行を停止させた状態であっても、油圧ポンプ用電動モータの駆動を継続することにより、作業機昇降用油圧シリンダを動作させて作業機を任意に昇降できるという利点があるものの、油圧ポンプ用電動モータの駆動によってバッテリの消費が増大するおそれがあった。
【課題を解決するための手段】
【0005】
本発明は、上記の如き実情に鑑みこれらの課題を解決することを目的として創作されたものであって、走行機体と、該走行機体に昇降自在に連結される作業機と、該作業機を昇降させる作業機昇降用油圧シリンダと、該作業機昇降用油圧シリンダに圧油を供給する油圧ポンプと、該油圧ポンプを駆動させる油圧ポンプ用電動モータと、走行動力及び作業動力を発生させる動力用電動モータと、動力用電動モータ及び油圧ポンプ用電動モータの駆動を制御するモータ制御装置と、を備える電動農作業車において、前記モータ制御装置は、作業機の昇降動作固定状態を検出すると共に、作業機が昇降動作固定状態のときは、油圧ポンプ用電動モータの駆動を休止させることを特徴とする。
また、前記油圧ポンプから供給される圧油でステアリングハンドル操作をアシストする油圧式パワーステアリング装置を備え、前記モータ制御装置は、作業機が昇降動作固定状態であっても、ステアリングハンドルが操作されたときは、油圧ポンプ用電動モータを駆動させることを特徴とする。
また、前記モータ制御装置は、作業機が昇降動作固定状態であっても、ステアリングハンドルが操作されたときは、油圧ポンプ用電動モータを駆動させるにあたり、該油圧ポンプ用電動モータの駆動速度をステアリングハンドルの切れ角の増加に応じて増速させることを特徴とする。
【発明の効果】
【0006】
請求項1の発明によれば、走行動力及び作業動力を発生させる動力用電動モータと、油圧ポンプを駆動させる油圧ポンプ用電動モータとをそれぞれ別々に備える2モータ方式の電動農作業車でありながら、作業機が昇降動作固定状態のときは、油圧ポンプ用電動モータの駆動を休止させるので、バッテリ消費を抑えることができる。
また、請求項2の発明によれば、作業機が昇降動作固定状態であっても、ステアリングハンドルが操作されたときは、油圧ポンプ用電動モータを駆動させるので、機体旋回時には、油圧式パワーステアリング装置によるステアリングハンドル操作のアシストを有効にすることができる。一方、ステアリングハンドルが操作されない機体直進時には、油圧式パワーステアリング装置によるアシストが無効となってハンドル操作が重くなる可能性があるが、それに伴いフラツキが抑制されて直進性が向上するという利点がある。
また、請求項3の発明によれば、油圧ポンプ用電動モータの駆動速度をステアリングハンドルの切れ角の増加に応じて増速させるので、油圧式パワーステアリング装置によるステアリングハンドル操作のアシストを適切に実行することができるだけでなく、油圧ポンプ用電動モータの駆動速度をステアリングハンドルの切れ角にかかわらず一気に定格速度まで上昇させる場合に比べてバッテリ消費を抑えることができる。
【図面の簡単な説明】
【0007】
【図1】電動乗用田植機の左側面図である。
【図2】ボンネットを取り外した走行機体の上部を示す斜視図である。
【図3】カバー類を取り外した走行機体の上部を示す斜視図である。
【図4】モータ搭載部を示す斜視図である。
【図5】モータ搭載部を示す平面図である。
【図6】ステアリングハンドルやカバー類を取り外したモータ搭載部の平面図である。
【図7】モータ搭載部の左側面図である。
【図8】モータ搭載部の右側面図である。
【図9】ステアリング操作機構の概略構成を示す左側面図である。
【図10】モータ制御装置の入出力を示すブロック図である。
【図11】ハンドル回転角とポンプ回転数の関係を示すグラフである。
【図12】ポンプモータ制御の制御手順を示すフローチャートである。
【発明を実施するための形態】
【0008】
以下、本発明の実施の形態について、図面に基づいて説明する。図1において、1は電動乗用田植機(電動農作業車)の走行機体であって、該走行機体1の後部には、昇降リンク機構2を介して植付作業機3が連結されている。植付作業機3は、下降接地状態で植付作業を行うように構成されており、走行機体1と昇降リンク機構2との間に介設される作業機昇降用油圧シリンダ4の伸縮に応じて昇降するようになっている。
【0009】
走行機体1は、電動モータ5が搭載されるモータ搭載部6、動力用電動モータ5Aの動力を変速するミッションケース7、オペレータが乗車する操作部8、操舵輪及び駆動輪を兼ねる前輪9、駆動輪である後輪10などを備える乗用型の四輪車両であり、操作部8には、オペレータが座る運転座席11、前輪9を操舵するステアリングハンドル12、走行変速操作を行う主変速レバー13、植付作業機3の昇降操作や植付クラッチの断続操作を行う作業機操作レバー14などが設けられている。
【0010】
図2〜図8に示すように、モータ搭載部6には、2つの電動モータ5A、5Bが搭載されている。一方は、走行動力及び作業動力を発生させる動力用電動モータ5Aであり、他方は、油圧ポンプ15を駆動させる油圧ポンプ用電動モータ5Bである。そして、油圧ポンプ用電動モータ5Bの動力は、伝動ベルト16を介して油圧ポンプ15のポンプ軸15aに入力され、動力用電動モータ5Aの動力は、伝動ベルト17を介してミッションケース7の入力軸7aに入力される。
【0011】
尚、図示は省略するが、ミッションケース7内には、入力軸7aの他に、植付伝動軸、走行伝動軸などの伝動軸が設けられている。動力用電動モータ5Aから入力軸7aに入力された動力は、株間変速機構を介して植付伝動軸に伝動されると共に、トルクリミッタ及び植付クラッチを介して、植付伝動軸から植付PTO軸に伝動される。そして、植付PTO軸から取り出される動力は、ミッションケース7外の伝動機構を経由して植付作業機3に伝動される。
【0012】
また、動力用電動モータ5Aから入力軸7aに入力された動力は、副変速機構を介して走行伝動軸に伝動される。走行伝動軸に伝動された動力は、前輪差動機構を介して左右の前輪駆動軸に伝動されると共に、走行PTO軸に伝動される。そして、走行PTO軸から取り出される動力は、ミッションケース7外の伝動機構を経由してリヤアクスルケース18に伝動される。
【0013】
油圧ポンプ用電動モータ5Bにより駆動される油圧ポンプ15は、前述した作業機昇降用油圧シリンダ4や、油圧式パワーステアリング装置19に対して圧油供給を行う。作業機昇降用油圧シリンダ4は、作業機操作レバー14の操作にもとづく油圧バルブの切り換え動作に応じて伸縮するようになっている。例えば、本実施形態の作業機操作レバー14は、「上昇」、「固定」、「自動昇降(下降)」、「植付」の4つの操作ポジションを有し、「上昇」ポジションでは、作業機昇降用油圧シリンダ4が作業機上昇方向に動作すると共に、植付クラッチが切り状態となり、「固定」ポジションでは、作業機昇降用油圧シリンダ4が停止すると共に、植付クラッチが切り状態となり、「自動昇降(下降)」ポジションでは、作業機昇降用油圧シリンダ4が自動制御状態(感知フロート20の上下動に応じて自動的に伸縮制御される状態)になると共に、植付クラッチが切り状態となり、「植付」ポジションでは、作業機昇降用油圧シリンダ4が自動制御状態になると共に、植付けクラッチが入り状態となる。
【0014】
尚、特許請求の範囲に記載した「昇降動作固定状態」とは、油圧ポンプ15からの圧油供給が停止しても、植付作業機3が現在の昇降位置を維持することができる状態を意味し、本実施形態では、作業機操作レバー14を「固定」ポジションとした状態がこれに相当する。
【0015】
図9に示すように、油圧式パワーステアリング装置19は、例えばトルクジェネレータ19aを用いて構成される。トルクジェネレータ19aは、ハンドル軸12aを介してステアリングハンドル12から入力される小さなトルクを、油圧により大きなトルクに変換し、このトルクで減速機構21やピットマンアーム22を動作させて前輪9の操舵を行うものである。尚、トルクジェネレータ19aは、油圧ポンプ15からの圧油供給が停止した状態であっても、ステアリングハンドル12による前輪9の操舵を許容するが、この状態では油圧によるアシストが無効になるので、ハンドル操作の操作荷重が増大する。
【0016】
図10に示すように、走行機体1にはマイコンなどを用いて構成されるモータ制御装置23が設けられている。モータ制御装置23の入力側には、主変速レバー13の操作位置を検出する主変速レバーセンサ24、作業機操作レバー14の操作位置を検出する作業機操作レバーセンサ25、ステアリングハンドル12の回転角を検出するハンドルセンサ26などが接続される一方、モータ制御装置23の出力側には、動力用電動モータ5Aや油圧ポンプ用電動モータ5Bが接続されている。
【0017】
モータ制御装置23は、制御用プログラムとして、主変速レバー13の操作位置に応じて動力用電動モータ5Aの駆動を制御する動力モータ制御と、作業機操作レバー14の操作位置やステアリングハンドル12の操作に応じて油圧ポンプ用電動モータ5Bの駆動を制御するポンプモータ制御を備えている。以下、本発明の特徴であるポンプモータ制御の概要及び具体的な制御手順について説明する。尚、動力モータ制御では、従前と同様の制御を行うので、具体的な制御手順の説明は省略する。
【0018】
本発明の実施形態に係るモータ制御装置23は、油圧ポンプ用電動モータ5Bの駆動を制御するにあたり、植付作業機3の昇降動作固定状態を検出すると共に、植付作業機3が昇降動作固定状態のときは、油圧ポンプ用電動モータ5Bの駆動を休止させる。例えば、作業機操作レバー14の操作位置が「固定」ポジションであるとき、植付作業機3が昇降動作固定状態であると判断し、油圧ポンプ用電動モータ5Bの駆動を休止させる。このようにすると、走行動力及び作業動力を発生させる動力用電動モータ5Aと、油圧ポンプ15を駆動させる油圧ポンプ用電動モータ5Bとをそれぞれ別々に備える2モータ方式の電動農作業車でありながら、植付作業機3が昇降動作固定状態のときは、油圧ポンプ用電動モータ5Bが休止するので、バッテリ消費を抑えることが可能になる。
【0019】
また、モータ制御装置23は、植付作業機3が昇降動作固定状態であっても、ステアリングハンドル12が操作されたときは、油圧ポンプ用電動モータ5Bを駆動させる。このようにすると、植付作業機3が昇降動作固定状態のとき油圧ポンプ用電動モータ5Bの駆動を休止させるものでありながら、機体旋回時には、油圧式パワーステアリング装置19によるステアリングハンドル操作のアシストを有効にすることができる。一方、ステアリングハンドル12が操作されない機体直進時には、油圧式パワーステアリング装置19によるアシストが無効となってハンドル操作が重くなる可能性があるが、それに伴いフラツキが抑制されて直進性が向上するという利点がある。
【0020】
また、モータ制御装置23は、植付作業機3が昇降動作固定状態であっても、ステアリングハンドル12が操作されたときは、油圧ポンプ用電動モータ5Bを駆動させるにあたり、該油圧ポンプ用電動モータ5Bの駆動速度をステアリングハンドル12の切れ角(以下、適宜ハンドル回転角という。)の増加に応じて増速させる。例えば、図11に示すように、ハンドル回転角θが0゜〜所定の角度θ1までの範囲では、油圧ポンプ用電動モータ5Bの駆動休止状態を維持し、ハンドル回転角θが所定の角度θ1〜θ2までの範囲(以下、適宜範囲Aという。)では、ハンドル回転角θの増加に応じて油圧ポンプ用電動モータ5Bの駆動速度を緩やかに増速させ、ハンドル回転角θが所定の角度θ2〜θ3までの範囲(以下、適宜範囲Bという。)では、ハンドル回転角θの増加に応じて油圧ポンプ用電動モータ5Bの駆動速度を急激に増速させる。このようにすると、油圧式パワーステアリング装置19によるステアリングハンドル操作のアシストを適切に実行することができるだけでなく、油圧ポンプ用電動モータ5Bの駆動速度をステアリングハンドル12の切れ角にかかわらず一気に定格速度まで上昇させる場合に比べてバッテリ消費を抑えることができる。
【0021】
図12は、ポンプモータ制御の制御手順を示すフローチャートである。
この図に示すように、ポンプモータ制御では、まず、作業機操作レバー14の操作位置を判断する(S1)。ここで、作業機操作レバー14の操作位置が「固定」ポジション以外の場合は、油圧ポンプ用電動モータ5Bの目標駆動速度に所定の定格速度をセットすると共に(S2)、該目標駆動速度に応じたモータ駆動信号を油圧ポンプ用電動モータ5Bに出力する(S3)。一方、作業機操作レバー14の操作位置が「固定」ポジションの場合は、ステアリングハンドル12の操作を判断し(S4)、ここで、ステアリングハンドル12の操作がないと判断した場合は(ハンドル操作角θがθ1以下)、油圧ポンプ用電動モータ5Bの目標駆動速度に停止速度をセットし(S5)、油圧ポンプ用電動モータ5Bの駆動を停止させる(S3)。一方、ステアリングハンドル12の操作がありと判断した場合は、ハンドル操作角θの大小を判断し(S6)、ここで、ハンドル操作角θが小さいと判断した場合は(ハンドル操作角θが範囲Aに含まれる)、現在のハンドル操作角θに所定のゲインαを乗じた値を目標駆動速度にセットし(S7)、油圧ポンプ用電動モータ5Bを低速で駆動させる(S3)。また、ハンドル操作角θが大きいと判断した場合は(ハンドル操作角θが範囲Bに含まれる)、現在のハンドル操作角θに所定のゲインβ(β>α)を乗じた値を目標駆動速度にセットし(S8)、油圧ポンプ用電動モータ5Bを中速又は高速で駆動させる(S3)。
【0022】
叙述の如く構成された本実施形態によれば、走行機体1と、該走行機体1に昇降自在に連結される植付作業機3と、該植付作業機3を昇降させる作業機昇降用油圧シリンダ4と、該作業機昇降用油圧シリンダ4に圧油を供給する油圧ポンプ15と、該油圧ポンプ15を駆動させる油圧ポンプ用電動モータ5Bと、走行動力及び作業動力を発生させる動力用電動モータ5Aと、動力用電動モータ5A及び油圧ポンプ用電動モータ5Bの駆動を制御するモータ制御装置23と、を備える電動乗用田植機において、モータ制御装置23は、植付作業機3の昇降動作固定状態を検出すると共に、植付作業機3が昇降動作固定状態のときは、油圧ポンプ用電動モータ5Bの駆動を休止させるので、バッテリ消費を抑えることができる。
【0023】
また、油圧ポンプ15から供給される圧油でステアリングハンドル操作をアシストする油圧式パワーステアリング装置19を備え、モータ制御装置23は、植付作業機3が昇降動作固定状態であっても、ステアリングハンドル12が操作されたときは、油圧ポンプ用電動モータ5Bを駆動させるので、機体旋回時には、油圧式パワーステアリング装置19によるステアリングハンドル操作のアシストを有効にすることができる。一方、ステアリングハンドル12が操作されない機体直進時には、油圧式パワーステアリング装置19によるアシストが無効となってハンドル操作が重くなる可能性があるが、それに伴いフラツキが抑制されて直進性が向上するという利点がある。
【0024】
また、モータ制御装置23は、植付作業機3が昇降動作固定状態であっても、ステアリングハンドル12が操作されたときは、油圧ポンプ用電動モータ5Bを駆動させるにあたり、該油圧ポンプ用電動モータ5Bの駆動速度をステアリングハンドル12の切れ角の増加に応じて増速させるので、油圧式パワーステアリング装置19によるステアリングハンドル操作のアシストを適切に実行することができるだけでなく、油圧ポンプ用電動モータ5Bの駆動速度をステアリングハンドル12の切れ角にかかわらず一気に定格速度まで上昇させる場合に比べてバッテリ消費を抑えることができる。
【0025】
尚、本発明は、前記実施形態に限定されないことは勿論であって、特許請求の範囲内において適宜変更が可能であることは言うまでもない。例えば、前記実施形態では、本発明に係る電動農作業車として電動乗用田植機を例示したが、電動乗用田植機以外の電動農作業車(例えば、電動乗用管理機)でも本発明を適用できることができる。
【符号の説明】
【0026】
1 走行機体
3 植付作業機
4 作業機昇降用油圧シリンダ
5A 動力用電動モータ
5B 油圧ポンプ用電動モータ
12 ステアリングハンドル
13 主変速レバー
14 作業機操作レバー
15 油圧ポンプ
19 油圧式パワーステアリング装置
23 モータ制御装置
24 主変速レバーセンサ
25 作業機操作レバーセンサ
26 ハンドルセンサ
【特許請求の範囲】
【請求項1】
走行機体と、該走行機体に昇降自在に連結される作業機と、該作業機を昇降させる作業機昇降用油圧シリンダと、該作業機昇降用油圧シリンダに圧油を供給する油圧ポンプと、該油圧ポンプを駆動させる油圧ポンプ用電動モータと、走行動力及び作業動力を発生させる動力用電動モータと、動力用電動モータ及び油圧ポンプ用電動モータの駆動を制御するモータ制御装置と、を備える電動農作業車において、
前記モータ制御装置は、作業機の昇降動作固定状態を検出すると共に、作業機が昇降動作固定状態のときは、油圧ポンプ用電動モータの駆動を休止させることを特徴とする電動農作業車のモータ制御装置。
【請求項2】
前記油圧ポンプから供給される圧油でステアリングハンドル操作をアシストする油圧式パワーステアリング装置を備え、
前記モータ制御装置は、作業機が昇降動作固定状態であっても、ステアリングハンドルが操作されたときは、油圧ポンプ用電動モータを駆動させることを特徴とする請求項1記載の電動農作業車のモータ制御装置。
【請求項3】
前記モータ制御装置は、作業機が昇降動作固定状態であっても、ステアリングハンドルが操作されたときは、油圧ポンプ用電動モータを駆動させるにあたり、該油圧ポンプ用電動モータの駆動速度をステアリングハンドルの切れ角の増加に応じて増速させることを特徴とする請求項2記載の電動農作業車のモータ制御装置。
【請求項1】
走行機体と、該走行機体に昇降自在に連結される作業機と、該作業機を昇降させる作業機昇降用油圧シリンダと、該作業機昇降用油圧シリンダに圧油を供給する油圧ポンプと、該油圧ポンプを駆動させる油圧ポンプ用電動モータと、走行動力及び作業動力を発生させる動力用電動モータと、動力用電動モータ及び油圧ポンプ用電動モータの駆動を制御するモータ制御装置と、を備える電動農作業車において、
前記モータ制御装置は、作業機の昇降動作固定状態を検出すると共に、作業機が昇降動作固定状態のときは、油圧ポンプ用電動モータの駆動を休止させることを特徴とする電動農作業車のモータ制御装置。
【請求項2】
前記油圧ポンプから供給される圧油でステアリングハンドル操作をアシストする油圧式パワーステアリング装置を備え、
前記モータ制御装置は、作業機が昇降動作固定状態であっても、ステアリングハンドルが操作されたときは、油圧ポンプ用電動モータを駆動させることを特徴とする請求項1記載の電動農作業車のモータ制御装置。
【請求項3】
前記モータ制御装置は、作業機が昇降動作固定状態であっても、ステアリングハンドルが操作されたときは、油圧ポンプ用電動モータを駆動させるにあたり、該油圧ポンプ用電動モータの駆動速度をステアリングハンドルの切れ角の増加に応じて増速させることを特徴とする請求項2記載の電動農作業車のモータ制御装置。
【図1】


【図2】
【図3】

【図4】

【図5】
【図6】
【図7】
【図8】
【図9】

【図10】
【図11】

【図12】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【公開番号】特開2013−63048(P2013−63048A)
【公開日】平成25年4月11日(2013.4.11)
【国際特許分類】
【出願番号】特願2011−204382(P2011−204382)
【出願日】平成23年9月20日(2011.9.20)
【出願人】(000001878)三菱農機株式会社 (1,502)
【Fターム(参考)】
【公開日】平成25年4月11日(2013.4.11)
【国際特許分類】
【出願日】平成23年9月20日(2011.9.20)
【出願人】(000001878)三菱農機株式会社 (1,502)
【Fターム(参考)】
[ Back to top ]