
Fターム[2B304MB02]の内容
Fターム[2B304MB02]に分類される特許
1 - 20 / 257
苗移植機
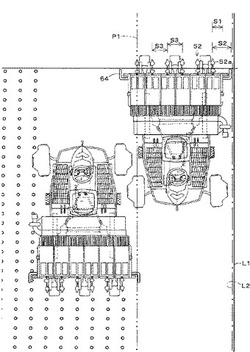
【課題】作業者が目視できない機体後方の苗植付装置とその近傍の情報を操縦席に着席したまま確認できるようにして、正しい圃場位置に苗を植え付けることができる構成を備えた苗移植機を提供すること。
【解決手段】苗を積載する複数条の苗タンク51に苗タンク51と走行車体2後方の情報を検出するCCDカメラ48と、該CCDカメラ48が検出した情報を表示する表示装置16を操縦部33に配置し、カメラ48が検出した情報から苗の植付条列や畦際を制御装置100で判断し、表示装置16に次の植付作業位置を示す第1植付仮想線P1及び圃場と畦際の境界線を示す第1畦際仮想線L1を出力することにより、走行車体2の後方の苗の植付状態や苗タンク51に積載した苗の状態を操縦部33から移動することなく確認することができ、苗の植付姿勢や植付深さの変更を速やかに行えるため、苗の植付姿勢が安定する。
(もっと読む)
農作業機

【課題】一気にプラウ12などの作業機が降下することを防いだ作業機を装着した農作業機を提供すること。
【解決手段】作業機昇降スイッチ23を下げ側に押し続けると、リフトシリンダ17の作動油が最大流量でリフトアーム19を下げ側に出力する自動すき込み制御機能を備え、車速センサ24により検知される所定の車速以上の車速が検出されない場合は、前記自動すき込み制御を禁止する制御構成を有する制御装置50を備えたトラクタであるので、作業機着脱時などを含めて前記自動すき込み制御が不要な場合に、この制御機能を働かせないので、誤操作しても急にリフトアーム19が下降して作業機やアスファルトを壊してしまうなどの恐れがなくなる。
(もっと読む)
作業機の油圧駆動装置
【課題】アンロード回路の調節による複数の油圧アクチュエータの駆動調節を適切に行わせることができる作業機の油圧駆動装置を提供する。
【解決手段】複数の油圧アクチュエータの操作弁機構30,40に圧油供給する圧油供給路26から圧油を排出するアンロード回路103、アンロード回路103を開度調節する操作弁107を設けてある。操作量検出手段151,152による検出情報、ポンプ回転検出手段153による検出情報に基いて操作弁107を制御するアンロード制御手段150を設け、操作弁機構30,40の操作量に応じてアンロード回路103を開度調節するように、油圧ポンプが低速回転であるとアンロード回路103を小開度に調節するように、油圧ポンプが高速回転であるとアンロード回路103を大開度に調節するように構成してある。
(もっと読む)
歩行型草刈り機
【課題】 果樹園の低い枝の下や、壁際など、車体が入れない箇所でも草刈りを可能とする歩行型草刈機の提供。
【解決手段】 クローラ11による走行駆動部1の前側に、昇降機構5により昇降可能な刈取部3を備えた歩行型草刈り機において、走行駆動部1の前側には先端側に左右一対のキャスター21、21を備えた支持フレーム2が走行駆動部1に対し横スライド可能な横スライド機構4を介して連結され、刈取部3は支持フレーム2に対し昇降機構5を介して昇降自在に吊下されている構成とした。
(もっと読む)
水平制御装置
【課題】オペレータが移動させたい方向とは反対方向に制御対象部材の傾きが変更されるという不都合を確実に防止する。
【解決手段】水平制御装置において、制御装置は、傾き設定部材が操作されると、当該傾き設定部材の操作方向を把握すると共に、傾きセンサによって検出された前記傾き設定部材の操作前の状態における制御対象部材の実際の傾きと前記傾き設定部材の操作後の状態に応じて設定される目標傾きを基準とした縮小幅の不感帯との相対位置関係に基づいてアクチュエータによって前記制御対象部材が傾けられるべき傾斜方向を把握して、前記操作方向及び前記傾斜方向が同じか否かを判定し、前記操作方向及び前記傾斜方向が同じ場合には前記傾き設定部材の操作時に行う不感帯幅の縮小幅への変更を許容し、前記操作方向及び前記傾斜方向が異なる場合には前記傾き設定部材の操作時に行うべき不感帯幅の縮小幅への変更を禁止して不感帯幅を標準幅に維持する。
(もっと読む)
作業車両
【課題】
操舵部材を直進位置に保持して自動直進走行を行なうことができると共に、機体が傾斜すると自動的に進行方向を修正することのできる作業車両を提供する。
【解決手段】
走行車体2に操舵輪10を設け、操舵輪10を操作する操舵部材34を設け、走行車体2に機体の傾斜を検出する傾斜検知部材101を設け、傾斜検知部材101が左右方向の傾斜を検知すると操舵部材34を操作して走行車体2の進行方向を補正する作業車両において、操舵部材34を操作自在な自由状態と、操舵部材34を直進位置に保持する保持状態に切り替える操作切替部材103を設け、操作切替部材103を保持状態に操作していても傾斜検知部材101が機体の傾斜を検知すると、操舵部材34の保持を解除して傾斜方向の反対側に操作する構成とする。
(もっと読む)
作業機及び作業システム
【課題】、高価な機器を利用せずに、圃場表面を一定の深さで削る。
【解決手段】圃場作業システムは、トラクタに接続され、駆動機構により接続部分の高さ位置が変更可能とされたフレーム12と、フレームの一部を圃場200から所定高さの位置で支持する尾輪14と、圃場表面の土壌を削り、運搬する排土板16と、フレームに対する排土板の高さ方向の位置を変更する位置変更機構18と、フレームの水平面に対する角度を検出する角度検出部30と、圃場の未削部分の表面に対するフレームの高さを検出する高さ検出部34と、フレームに対する排土板の高さ方向の位置関係を検出する位置関係検出部32と、角度検出部の検出結果に基づいてフレームの角度を水平に維持するように駆動機構を制御し、当該制御状態での高さ検出部と位置関係検出部の検出結果に基づいて、位置変更機構を制御する制御部と、を備える。
(もっと読む)
電動農作業車のモータ制御装置
【課題】走行動力及び作業動力を発生させる動力用電動モータと、油圧ポンプを駆動させる油圧ポンプ用電動モータとをそれぞれ別々に備える2モータ方式の電動農作業車において、バッテリ消費を抑える。
【解決手段】走行機体1に昇降自在に連結される植付作業機3と、該植付作業機3を昇降させる作業機昇降用油圧シリンダ4と、該作業機昇降用油圧シリンダ4に圧油を供給する油圧ポンプ15と、該油圧ポンプ15を駆動させる油圧ポンプ用電動モータ5Bと、走行動力及び作業動力を発生させる動力用電動モータ5Aと、動力用電動モータ5A及び油圧ポンプ用電動モータ5Bの駆動を制御するモータ制御装置23と、を備える電動乗用田植機において、モータ制御装置23は、植付作業機3の昇降動作固定状態を検出すると共に、植付作業機3が昇降動作固定状態のときは、油圧ポンプ用電動モータ5Bの駆動を休止させる。
(もっと読む)
農作業機
【課題】作業者の負担を軽減できる農作業機を提供する。
【解決手段】農作業機1は、トラクタの後部に連結する機体2を備える。機体2には、耕耘体を回転可能に設ける。機体2には、整地体4を上下方向に回動可能に設ける。農作業機1は、整地体4の状態を表示する状態表示手段80を備える。
(もっと読む)
移植機
【課題】走行機体の後進切換に連動して、弾性部材の付勢力により操作体を介して作動体を植付作業機が自動的に上昇駆動する側に回動作動させる移植機において、前記弾性部材を操作体が効率良く回転作動されるように配置するとともに、スムーズに植付作業機が上昇する側に作動体を回動させることができる移植機を提供することを課題としている。
【解決手段】植付作業機6を昇降作動させるように回動可能に支持された作動体31と、操作体39を介して植付作業機6が上昇する側に作動体31を付勢する弾性部材41とを備え、走行機体3の後進切換に連動して植付作業機6を自動的に上昇駆動させることができる移植機において、操作体39がロック位置に回動された際、弾性変形した状態で、操作体39の回動支点を挟んで対向する一対のスプリング41A,41Bによって前記弾性部材41を構成した。
(もっと読む)
作業車両のエンジン負荷制御装置
【課題】作業時に過負荷がかかった場合において、作業形態に応じて減速割合を変更可能とし、負荷制御のモードを切換可能な作業車両のエンジン負荷制御装置を提供する。
【解決手段】作業車両のエンジン負荷制御装置において、エンジン負荷制御装置50は、エンジン回転数を設定エンジン回転数Xsに保つように、エンジン21が過負荷となった時の負荷に応じて、車速を増減し、又は作業機30を昇降する構成とし、負荷車速制御と負荷作業機昇降制御との制御優先順位を設定する制御実行順序設定手段52を備える。
(もっと読む)
苗移植機
【課題】旋回操作連動で植付部を昇降制御する場合に、下降時の植付部の保護と圃場面の検出精度を損なうことなく、速やかに植付を再開できる苗移植機を提供する。
【解決手段】苗移植機は、圃場走行用の走行部(2,3)と、苗移植の作業高さを検出する圃場面センサ(6s)を備えて昇降リンク(5)により昇降可能な植付部(6)と、この植付部(6)を左右水平に角度調節するローリング機構(7)と、の旋回開始で植付部(6)を上昇保持し、旋回終了で作業高さに戻す旋回連動昇降機構とを設けて構成され、上記植付部(6)の高さ位置を検出する位置検知装置(5s)を設け、この位置検知装置(5s)により、旋回開始時の植付部(6)の作業高さを記憶するとともに、旋回終了時の植付部(6)の下降の際に、記憶による作業高さ位置から上方に所定距離の高さ位置を境にその上下で下降速度を切替え制御可能に上記旋回連動昇降機構を構成したものである。
(もっと読む)
苗移植機
【課題】レバー式植付操作機構に旋回連動機構を備える苗移植機において、植付昇降レバーの誤操作によることなく、植付部の安定動作を確保することができる苗移植機を提供する。
【解決手段】苗移植機は、走行車体を旋回操作する操舵部材(4)と、走行車体に昇降可能に支持した植付部(6)と、この植付部(6)の上昇、中立、下降、植付の順に切替え動作させる植付昇降レバー(8)と、上記操舵部材(4)による旋回の開始及び終了と連動して植付昇降レバー(8)を上昇と下降の位置に移動させる自動昇降機構(C)とを備えて構成され、上記植付部(6)の植付作業を検知する作業検知部材を設け、検知した作業が所定の継続範囲に該当しない場合に自動昇降機構(C)の作動を停止するものである。
(もっと読む)
作業車両における作業機の昇降制御装置
【課題】作業機を下降させた状態での機体後進を確実に回避し、作業機の損傷を未然に防止する。
【解決手段】機体後部に昇降可能に連結される作業機3を昇降制御する制御部19であって、該制御部19は、ポジションコントロールレバー17の操作位置に応じて作業機3を昇降制御するポジション制御手段と、走行機体1の後進又は後進操作に応じて作業機3を所定の上昇位置まで上昇制御するバックアップ制御手段と、クイックアップレバー9の上昇操作に応じて作業機3を所定の上昇位置まで上昇制御し、クイックアップレバー9の下降操作に応じて作業機3を所定の下降位置まで下降制御するクイックアップ制御手段とを備え、バックアップ制御手段によって作業機3が上昇している際には、走行機体1の後進又は後進操作が解除されない限り、クイックアップレバー9による作業機3の下降制御を無効とする。
(もっと読む)
移動式電動作業機
【課題】作業部の過負荷運転を回避することができる移動式電動作業機を提供する。
【解決手段】走行部20によって移動しながら、ブレードインバータ14A・14Bから供給される電力により駆動される作業部10A・10Bによって作業を行い、デッキ高さ調整部30によってデッキ3のデッキ高さ位置Hを調整する電動式芝刈作業機100であって、ブレードインバータ14A・14Bからのブレードインバータ電流値Iba・Ibbに基づいて、作業部10A・10Bの作業負荷が一定となるように、デッキ3のデッキ高さ位置Hの調整を制御する。
(もっと読む)
作業車両
【課題】本発明は、路上走行と耕耘作業のモード切替手段を設けることによって路上走行速のままで耕耘作業に入るような事態を回避し、問題解決を図らんとするものである。
【解決手段】メータパネル(8)の適所にスイッチON・OFFにより耕耘作業モードと路上走行モードとに切り替えできるモード切替スイッチ(22)を設け、前記耕耘作業モードの詳細設定をする各種設定器(29)は、前記メータパネル(8)部周辺若しくは運転操作部(9)近くに設置してあることを特徴とする作業車両とする。また、前記各種設定器(29)は、耕深設定器(24)、傾斜設定器(26)、ブレーキ調整設定器(28)等からなり、タッチパネル画面で調整が行えるように構成してあることを特徴とする作業車両とする。
(もっと読む)
田植機
【課題】土壌条件や植深をリアルタイムで取得できる田植機を提供する。
【解決手段】田植機は、植付部と、土壌反力検出装置と、制御部と、を備える。植付部は、植付爪を駆動することにより苗の植付けを行う。土壌反力検出装置は、植付爪が苗の植え付けを行うごとに土壌から受ける土壌反力を検出する土壌反力検出部と、植付爪の回転位相を検出する回転位相検出部を備えている。前記制御部は、前記土壌反力及び回転位相に基づいて植深値を算出する(S102)。そして制御部は、検出された植深値に基づいて、植付部を昇降制御する(S109)。
(もっと読む)
作業車両
【課題】エンジンの出力特性に合致するようエンジン回転数やHST開度を自動調節する機構を備えた作業車両を提供すること。
【解決手段】エンジン回転数の上昇だけで予め設定されているエンジン回転数とエンジントルクの関係を示す適切な出力特性となるトルクが得られない場合にHSTサーボアクチュエータ30を作動させて油圧式無段変速装置(HST)の開度を下げて、適切な出力特性となるトルクを得て、その後再びHSTサーボアクチュエータ30を作動させてHST23の開度を設定した開度に戻す制御構成を有する制御装置100を設けた作業車両であり、エンジントルクと回転数が予め設定された適切なトルク対回転数の出力特性と比較し、エンジン回転数を前記出力特性に合致する値に変更する制御構成としたことにより、自動的に燃費が良い状態に維持されるので、燃費が従来より向上する。
(もっと読む)
トラクター直装式ブームスプレーヤ
【課題】 ブームが実際に傾斜した場合にそのブームを速やかに、かつ適正に回動制御して迅速な傾斜角度の補正ができるトラクター直装式ブームスプレーヤを提供する。
【解決手段】 ブーム4が基部フレーム3に対してその重心近傍で回動自在に支持されているとともに、ブーム4を正逆方向に回動させるブーム回動手段8と、前輪車軸24の車体21に対する相対的な傾斜角度を計測する前輪傾斜角度計測手段9と、走行面の凹凸により後輪が傾斜する前に、前輪車軸の相対的な傾斜角度の方向と反対方向にブーム4を回動させるための準備をブーム回動手段8に実行させるブーム回動準備制御手段11と、ブーム4の基部フレーム3に対する相対的な傾斜角度を計測するブーム傾斜角度計測手段10と、ブーム4の相対的な傾斜角度が所定の範囲を超えた場合、回動準備中のブーム回動手段8を駆動してブーム4を制御するブーム回動制御手段12とを有する。
(もっと読む)
作業車両
【課題】作業機の昇降制御を安定させた作業車両を提供する。
【解決手段】田植機は、植付部と、制御部と、を備える。制御部は、植付部の加速度(具体的にはフロート角加速度)を取得する。そして制御部は、前記加速度に二階微分ゲインKd2を乗じたものに基づいて、植付部の昇降制御を行う。このように植付部の加速度に基づいて昇降制御を行うことにより、植付部の上下速度の変動が大きい場合の振動的な応答を抑制できる。また、前記加速度は、圃場表面からの反力によって生じるため、当該加速度に基づいて制御を行うことにより、圃場の硬さに応じた制御動作を実現することができる。
(もっと読む)
1 - 20 / 257
[ Back to top ]