
Fターム[2B043AB07]の内容
農業機械一般(操向) (6,001) | 目的、効果又は機能 (649) | 操舵性の向上 (230) | 直進走行性又は操舵安定性 (35)
Fターム[2B043AB07]に分類される特許
1 - 20 / 35
電動農作業車のモータ制御装置
【課題】走行動力及び作業動力を発生させる動力用電動モータと、油圧ポンプを駆動させる油圧ポンプ用電動モータとをそれぞれ別々に備える2モータ方式の電動農作業車において、バッテリ消費を抑える。
【解決手段】走行機体1に昇降自在に連結される植付作業機3と、該植付作業機3を昇降させる作業機昇降用油圧シリンダ4と、該作業機昇降用油圧シリンダ4に圧油を供給する油圧ポンプ15と、該油圧ポンプ15を駆動させる油圧ポンプ用電動モータ5Bと、走行動力及び作業動力を発生させる動力用電動モータ5Aと、動力用電動モータ5A及び油圧ポンプ用電動モータ5Bの駆動を制御するモータ制御装置23と、を備える電動乗用田植機において、モータ制御装置23は、植付作業機3の昇降動作固定状態を検出すると共に、植付作業機3が昇降動作固定状態のときは、油圧ポンプ用電動モータ5Bの駆動を休止させる。
(もっと読む)
自走車両

【課題】操縦操作に基づいて制御量を生成する制御ユニットと、自由操向可能なキャスタ輪と、制御指令により互いに独立して駆動制御される第1駆動部及び第2駆動部と、第1駆動部によって走行駆動される左駆動輪及び第2駆動部によって走行駆動される右駆動輪とを備えた自走車両において熟練を要せずに傾斜面を駆動走行しながら自在に横切ることができること。
【解決手段】第1・第2駆動部に要求される必要駆動トルクを算出する駆動トルク算定部と、傾斜横切り走行時における目標走行方向と実走行方向との方向ずれを解消する補償トルクを第1・第2駆動部に対して車両の傾斜度に基づいて算出する補償トルク算定部と、必要駆動トルクと補償トルクとに基づいて制御量を補正する補正部とが含まれている。
(もっと読む)
自走車両
【課題】操縦操作に基づいて制御量を生成する制御ユニットと、キャスタ輪と、制御指令により互いに独立して駆動制御される第1駆動部及び第2駆動部と、第1駆動部によって走行駆動される左駆動輪及び第2駆動部によって走行駆動される右駆動輪とを備えた自走車両において熟練を要せずに傾斜面を駆動走行しながら自在に横切ることできること。
【解決手段】傾斜横切り走行時に発生する目標走行と実走行との走行方向ずれを、車両の傾斜度に基づいて、解消するようにキャスタ輪の操向角を制御する。
(もっと読む)
トラクタ
【課題】左右ブレーキの連結を自動的に確保し、路上走行の安全を図る。
【解決手段】走行車体に左右に並設されている左右ブレーキぺダルと、該左右ブレーキぺダルを連結状態としたりあるいは非連結状態とするブレーキ連結解除手段と、ロータリ耕耘装置を昇降回動するリフトアームと、作業モードを走行軽作業モードと耕耘重作業モードに切り換える作業切換ダイヤルと、前記リフトアームの昇降状態を検出するリフトアーム昇降センサと、前記ブレーキ連結解除手段を切換作動するブレーキ連結解除アクチュエータとを備えたトラクタにおいて、前記作業切換ダイヤルを耕耘重作業モード以外への切換状態で、前記リフトアーム昇降センサが前記リフトアームの所定高さ以上の上昇検出をすると、左右ブレーキ連結解除アクチュエータを連結作動し非連結状態にあるブレーキ連結解除手段を左右連結状態にするコントローラを設けたことを特徴とするトラクタとする。
(もっと読む)
田植機
【課題】操作者が植付部に苗を補給している間であっても、苗を整列させて植付けることができる田植機を提供する。
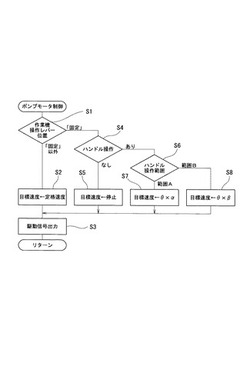
【解決手段】CPUは、自動走行スイッチがオンになっている場合に、左右方向において、表示部に表示された線の中央と苗の列との距離を求め、求めた距離に応じた操舵量を演算する。操舵量を演算したCPUは、電磁切換弁201に切換信号を出力する。走行部1は、演算された操舵量だけ右又は左に操舵される。操舵終了後は、電磁切換弁201を中立位置に戻し、走行部を直進させる。
(もっと読む)
田植機
【課題】正面にポールを立設することなく、簡易な操作で苗を整列させることができる田植機を提供することを目的とする。
【解決手段】往路又は復路において、操作者がGUI151a又は151bを選択することによって、右フロントカメラ又は左フロントカメラが撮像した画像を撮像表示部151に表示させる構成とした。また既設の情報表示部と撮像表示部151とを一体化した。またいわゆるバックモニタとして撮像表示部151を使用できる構成とした。
(もっと読む)
自動芝刈り機
【課題】走行路面に柔軟に対応して傾斜地形のカッティングも可能な自動芝刈り機を提供する。
【解決手段】本発明は、少なくとも位置検出手段を含む各種センサとモータ制御の駆動輪とを有し、学習機能を担う制御ユニットを備えた自律走行型の自動芝刈り機であって、制御ユニットは、センサの情報を基に駆動輪を制御して目標地点に移動させるためのドラム制御部と、走行路面の傾斜に応じて車軸を動かし車体の平衡を保つ車体平衡部と、走行路面に沿ってカッティングユニットを追従させて芝刈りを行うカッティング部と、センサの情報を基に各ユニットを制御するための各種演算及び該演算に対応する処理を行う演算処理部と、を有する。
(もっと読む)
農作業システム
【課題】走行車の車輪がレール上で滑ることを防止することにより、地面が傾斜する場合でも走行車をその地面上で安定して走行させることが可能である農作業システムを提供する。
【解決手段】地面2から離れた位置にある農作物6に対して作業者36が作業を行うことを可能とする農作業システムである。地面2上に設けられたレール11と、作業者36が乗ってレール11上を走行する走行車8とを有し、走行車8はレール11上に乗る車輪21a,21bを有しており、レール11は合成樹脂によって形成され、その表面に凹凸形状14が設けられており、凹凸形状14はレール11の延在方向に沿って凹部と凸部とが交互に位置している。
(もっと読む)
門型たばこ栽培作業機
【課題】左右のクローラを駆動して走行する門型たばこ栽培作業機について、エンジンの回転速度の如何に関わらず、超微速で長時間安定走行させることができ、作業機の始動、停止を緩慢に、安定的に行えるように、その走行伝動機構を工夫する。
【解決手段】左右の走行フレームのいずれか一方に搭載されている動力部が互いに一体の斜板ポンプと斜板モータによる油圧減速機によるものであり、斜板ポンプをガソリンエンジンで直接駆動するようになっており、動力分配機が左右の出力スプロケットを等速で駆動する駆動手段であり、変速レバーは上記斜板ポンプを操作して上記斜板モータを変速させ、また正逆転させるものであり、上記左右のクラッチレバーは上記左右の操向クラッチを操作するものであり、左右のブレーキペダルは上記左右のブレーキを操作するものである。
(もっと読む)
乗用移植機
【課題】差動装置による差動を規制することのできる乗用移植機において、様々な走行状態に適用可能で、効率的な作業走行及び路上走行を行うことができる汎用性の高い乗用移植機を提供する。
【解決手段】左右一対の前後輪と、異なる速度で動力を分配伝動させる差動状態で左右の前輪に動力を分配伝動可能な差動装置と、ステアリング作動に連動して旋回内側のサイドクラッチを切断作動させる連係機構とを備え、差動装置の差動状態を制動力によって規制する規制機構42を設けた乗用移植機において、上記制動力を発生させずに差動状態を規制しない路上走行用状態と、差動装置がデフロックされるように上記制動力を発生させるデフロック状態と、デフロック時よりも小さい制動力を発生させて差動状態を規制する作業走行用状態との少なくとも3つの状態に切換可能に前記規制機構42を構成した。
(もっと読む)
乗用溝切り機
【課題】駆動装置による圃場での安定走行を実現すると共に、圃場だけでなく舗装路のような道路でも乗用が可能となる画期的な乗用溝切り機を提供すること。
【解決手段】操舵する前輪1と、駆動輪となる後輪2とを乗用部3に設け、少なくとも後輪2を右後輪2Rと左後輪2Lとを有する複数輪に構成すると共に、この右後輪2Rと左後輪2Lとを、駆動装置8により回転駆動される回転駆動軸と連結して駆動するように構成し、この回転駆動軸と前記右後輪2R若しくは左後輪2Lとを連結する連結部10に、この回転駆動軸の回転を伝達する駆動連結状態と回転が伝達されないで回転自在となるフリー連結状態とに切り替える駆動・フリー切り替え機構11を設ける。
(もっと読む)
移動農機
【課題】簡素な構成によって直進性を確保することを可能にした油圧式無段変速装置を備えた移動農機を提供する。
【解決手段】クローラトラクタは、ステアリングホイールが中立位置にされると、斜板式可変容量ポンプ37rの前進側斜板操作ポート37raと斜板式可変容量ポンプ37lの前進側斜板操作ポート37la、斜板式可変容量ポンプ37rの後進側斜板操作ポート37rbと斜板式可変容量ポンプ37lの後進側斜板操作ポート37lbをそれぞれ連通するバイパスバルブ35を備えている。これにより、左右の斜板式可変容量ポンプ37r,37lに入力される制御圧が等しくなるので、直進性を確保することができる。
(もっと読む)
コンバイン
【課題】デバイダが穀稈の株を割らずに分草し、円滑に穀稈を搬送すると共に乱れなく穀稈を刈取り可能な8条刈りのコンバインを提供する。
【解決手段】8条刈りのコンバイン1は、9本のデバイダを有していると共に、これら9本のデバイダのうち左端から数えて4番目、右端から数えて6番目の機体内側のデバイダを刈取り基準位置としている。上記9本のデバイダは、刈取り基準位置のデバイダが左右の穀稈の中央に位置する際、尺植え及び尺一寸植えのどちらでも穀稈の株を割らないように配設されている。また、この刈取り基準位置のデバイダを支持するデバイダフレーム23aには、方向自動制御用の方向センサ18が取付けられており、この方向センサ18の左右のセンサバー18L,18Rと穀稈とが接触すると、その接触した側のセンサバー18L,18Rとは逆方向に機体の進行方向が修正される。
(もっと読む)
走行車両
【課題】 本発明は、機体が小回り旋回性を維持しながら、旋回後半には旋回後のための位置合わせが容易に行えるようにすることを課題とする。
【解決手段】 ステアリング機構により前輪が直進状態から操舵状態へ操向されるのに連動して旋回内側のサイドクラッチを断続的に入/切し、前輪が操舵状態から直進状態へ戻るのに連動して旋回内側のサイドクラッチを常時入状態にする旋回連動機構と、走行車体の旋回中において、前輪の向きが操舵状態から直進状態側へ戻されるのを旋回角度センサが検出するのに連動して、旋回連動機構により断続的に入/切する周期における入状態の割合を大きく変更し、以降、前輪が直進状態へ戻るまで前記入状態の割合を小さく変更しない制御装置を備えた走行車両とした。
(もっと読む)
自走式作業台車
【課題】 作業ユニットを安定的に支持することができるとともに、傾斜地でも安定して走行しながら作業を行うことができる自走式作業台車を提供すること。
【解決手段】 走行体本体4、前輪24及び後輪を備えた自走式走行体と、走行体本体4に設けられた支柱54と、支柱54に取り付けられた支持フレーム74と、支持フレーム74に装着された作業ユニット140と、支持フレーム74の先端部に設けられた支持・操作手段110と、を具備する。前輪24及び後輪の少なくともいずれか一方は駆動輪として機能し、また前輪24及び後輪の少なくともいずれか一方は操舵可能であり、更に、支持フレーム74は、支柱54を中心として180度以上の角度範囲にわたって旋回自在に支持されているとともに、仰俯角が水平方向を基準に5度以上となるように上下方向に揺動自在に支持されている。
(もっと読む)
作業車輌
【課題】複数のコントローラを、それぞれの制御対象となる操作手段又は作動手段に近接して配置した作業車輌を提供する。
【解決手段】トラクタは、主変速操作スイッチを備えた副変速レバーの下方側に、変速を制御する変速コントロールユニットC2を有し、サイドスイッチパネル18の下方部分に、作業機の昇降を制御する昇降コントロールユニットC3を有し、表示パネル15の裏側に、走行情報及び作業情報を表示する表示パネル15を制御する表示コントロールユニットC4を有し、表示パネル15の機体前方側に備えられ、これらコントロールユニットに通信回線によって接続されると共に操作レバー・スイッチや各種センサ等からの入力情報に基づいて指令信号を発する操作コントロールユニットC1を有して構成されている。これにより、各コントロールユニットと操作手段及び作動手段とを近接して配置することができる。
(もっと読む)
移動車両の直進誘導システム
【課題】運転者の負担を軽減し、熟練者でなくても高能率・高精度な作業ができる移動車両の直進誘導システムを提供する。
【解決手段】この移動車両の直進誘導システムは、移動車両搭載部1、移動車両が直進走行すべき走路前方の延長線上に設置される遠方目標部2を備える。移動車両搭載部1はカメラ部11、カメラ部11からの画像を処理し走行情報を出力する画像処理部12、走行情報に基づき移動車両を制御する車両制御部14,操向制御機構15を有する。遠方目標部2はカメラ部11の撮像周期と最大露光時間の合計時間以上で撮像周期の2倍以下の時間の点灯と消灯とを繰り返す。画像処理部12は現フレームと前フレーム及び、現フレームと前々フレームにおいて第1,第2の遠方目標部候補画素を抽出し、第1,第2の遠方目標部候補画素を統合し、統合した遠方目標部候補画素に対し遠方目標部2の位置検出を行い、検出結果に基づき走行情報を生成する。
(もっと読む)
走行車両
【課題】走行機体を支持する左右の走行部に動力伝達する直進走行用変速装置と,動力を逆回転伝達する旋回走行用変速装置とを備えた走行車両において,直進及び旋回走行の操作性を小型の機構にて向上する。
【解決手段】前記旋回用操作具にて回転する旋回入力軸72を内蔵するステアリングボックス20内に,前記旋回入力軸にて回転する変速制御体81と旋回制御体82とを,変速制御体が前記旋回入力軸に直交する変速軸線Xの回りに回転自在し,旋回制御体が前記旋回入力軸の軸線及び前記変速軸線Xに直交する旋回軸線Yの回りに回転自在に設け,これらの両方を,前記変速用操作具に連動する主変速レバー入力軸85を介してその軸線回りに傾き回転し,前記変速制御体の傾き回転にて変速出力軸86を介して直進走行用変速装置を変速作動し,前記旋回制御体の前記旋回入力軸による回転にて旋回出力軸104を介して旋回走行用変速装置を変速作動する。
(もっと読む)
走行車両
【課題】走行機体1を支持する左右の走行部2に動力伝達する直進走行用変速装置25と,前記走行部に動力を逆回転伝達する旋回走行用変速装置28と,前記直進走行用変速装置に対する変速用操作具13と,前記旋回走行用変速装置に対する旋回用操作具10を備えて成る走行車両において,その直進及び旋回走行の操作性を簡単で小型の機構にて向上する。
【解決手段】前記旋回用操作具にて回転する旋回入力軸72を内蔵するステアリングボックス20内に,前記旋回入力軸にて回転する変速制御体81と旋回制御体82とを,変速制御体が前記旋回入力軸に直交する変速軸線Xの回りに回転自在し,旋回制御体が前記旋回入力軸の軸線及び前記変速軸線Xに直交する旋回軸線Yの回りに回転自在に設け,これらの両方を,前記変速用操作具に連動してその各々における軸線の回りに傾き回転し,前記変速制御体の傾き回転にて前記直進走行用変速装置を変速作動し,前記旋回制御体の前記旋回入力軸による回転にて前記旋回走行用変速装置を変速作動する。
(もっと読む)
乗用型田植機
【課題】 前後車輪を備えた走行機体の後部に苗植付け装置を昇降可能に連結するとともに、前記走行機体の後部にエンジンを搭載して、その上方に運転座席を配置した乗用型田植機において、機体操縦操作の容易化を図る構造を有効に活用して、機体の前後重量バランスを改善する。
【解決手段】 走行機体3の前部に前車輪1を操向するステアリング軸を立設するとともに、ステアリング軸の下端部近傍にパワーステアリングユニット31を配備してある。
(もっと読む)
1 - 20 / 35
[ Back to top ]