
Fターム[2B304PD31]の内容
Fターム[2B304PD31]の下位に属するFターム
Fターム[2B304PD31]に分類される特許
1 - 10 / 10
乗用移植機
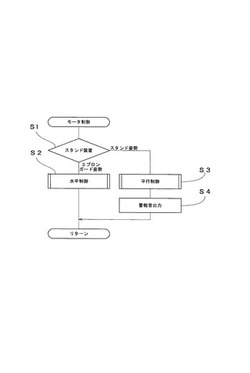
【課題】植付作業機を傾斜した地面に下ろす際に、植付作業機や強制傾斜機構の破損を防止する。
【解決手段】走行機体1の後部に昇降自在かつ左右傾斜自在に連結される植付作業機3と、植付作業機3の走行機体1に対する左右傾斜姿勢を水平制御モータ15の動力で強制的に変化させる強制傾斜機構19と、植付作業機3が水平姿勢を維持するように水平制御モータ15を駆動制御する水平制御手段と、スタンド姿勢と非スタンド姿勢とに変姿可能な状態で植付作業機3に設けられ、植付作業機3を地面に下ろす際にスタンド姿勢とされるスタンド装置23と、を備える乗用移植機であって、スタンド装置23の姿勢を検出するスタンド検出スイッチ29と、スタンド装置23がスタンド姿勢のとき、植付作業機3が走行機体1に対して平行となるように水平制御モータ15を駆動制御する平行制御手段と、を備える。
(もっと読む)
作業車両

【課題】走行機体の左右傾斜に拘わらず作業機を圃場面に対して予め定められた左右傾斜姿勢で保持させる左右傾斜制御を行う作業車両であって、低コストで、精度の高い左右傾斜制御を実行することが可能な作業車両を提供する。
【解決手段】前輪1側のフロントアクスルケース23の左右傾斜によって走行機体3が左右傾斜することを抑制するために、走行機体3をフロントアクスルケース23に左右傾斜可能に支持し、フロントアクスルケース23の左右傾斜角を検出する前輪側傾斜角検出手段と、走行機体3の走行速度を検出する車速検出手段とを設け、制御部は、前輪側傾斜角検出手段によって事前に検出されたフロントアクスルケース23の左右傾斜角と、車速検出手段からの検出結果とによって、走行機体3のその後の左右傾斜角を予測し、予測結果及び傾斜角検出手段36の検出結果に基づいて左右傾斜制御を実行する。
(もっと読む)
作業車両
【課題】オペレータが作業中に昇降制御や姿勢制御が確実に行われていることを確認できるようにすると共に、昇降制御や姿勢制御における感度調節のための参考情報を容易に得られるようにする。
【解決手段】昇降制御、或いは姿勢制御を行うアクチュエータ24,32に対して伸張指令が出されているか、縮小指令が出されているか、又は制御不能な状態にあるか否か等を、座席に座ったオペレータが目視可能なセンターピラー9bに設ける表示ユニット57を介してオペレータに表示する。
(もっと読む)
走行作業機の油圧ローリング制御装置
【課題】本発明では、ローリング油圧シリンダが作動しない状態が長く続いてもオイル漏れなどの支障が生じないようにすることを課題とする。
【解決手段】走行車体に作業機をローリング可能に装着し、ローリング油圧シリンダで作業機をローリング制御する走行作業機の油圧ローリング制御装置において、ローリング油圧シリンダへの圧油供給時間をカウントする油圧作動タイマとローリング油圧シリンダの作動を検出するローリングセンサを設け、該ローリングセンサが所定時間を超えてローリング油圧シリンダが作動しないことを検出するか制御装置からローリング信号が出力されない場合には、ローリング油圧シリンダに僅かのローリング指令を出力すべくして走行作業機の油圧ローリング制御装置を構成した。
(もっと読む)
農作業機の対地作業機自動ローリング制御装置
【課題】凹凸が多くて左右に傾き易い圃場でも安定して作業機の水平維持が行われるようにする。
【解決手段】傾斜センサ14の検出に基づく絶対傾斜角θsを基準に対地作業機18のローリング制御を行うか、角速度センサ16の検出に基づく相対傾斜角θk又は前記絶対傾斜角θsに角速度センサ16の相対傾斜角θkを加味した作業機傾斜目標角θtを基準に対地作業機18のローリング制御を行うかを判定する手段を設け、前記判定手段の判定結果にもとづき、走行機体の傾き検出時に角速度センサ16の傾斜検出値に基づいてローリングシリンダ9に作動パルス信号を出力してローリング制御を行い、傾斜センサ14の傾斜検出値でローリングシリンダ9に作動パルス信号を続けて出力してローリング制御を行うよう構成し、角速度センサ16の制御時の出力パルスのオン時間を傾斜センサ14の制御時のオン時間よりも長くする。
(もっと読む)
耕起作業機の耕深制御構造
【課題】エンジン回転数を耕深制御での指標とせずに、耕起装置の耕起深さを設定手段により設定した制御目標耕深に維持できるようにする。
【解決手段】走行車体1に対して耕起装置3を昇降駆動する駆動手段41、耕起装置3の制御目標耕深を設定する設定手段56、耕起装置3の対車体高さを検出する検出手段54、検出手段54の出力が設定手段56の出力に対応するよう駆動手段41の作動を制御する制御手段25A、エンジン6の燃料噴射量を演算する演算手段62、及び、検出手段54の出力が設定手段56の出力に対応したときの演算手段62の出力を制御基準値として記憶する記憶手段25Cを備え、制御手段25Aが、制御基準値と演算手段62の出力に基づいて制御目標耕深を補正し、検出手段54の出力が補正後の制御目標耕深に対応するよう駆動手段41の作動を制御する。
(もっと読む)
農作業機
【課題】本発明では、農作業機の走行機体に対地作業機をローリング制御可能に装着した構成で、エンジンの回転速度の変化にかかわらず、ローリング制御が精度良く作動するようにすることを課題とする。
【解決手段】農作業機の走行機体1に対地作業機13を水平シリンダ19の駆動でローリング可能に装着し、走行機体1或は対地作業機13に設けた傾斜センサ23の検出信号とエンジン2の回転を検出するエンジン回転センサ27の検出回転数をコントローラ30に入力し、該コントローラ30から出力する水平シリンダ19の駆動出力デュティー比をエンジン回転数の低下で増加させて水平シリンダ19の動作速度がエンジン2の実用回転域で略一定になるようにした構成したことを特徴とする農作業機の構成とする。
(もっと読む)
農作業機
【課題】簡便で低コストの構造で、作業者の操作及び技量によらず作業部が元畦に追従するように機能させるか否かの選択が可能な畦塗り機を提供することを目的とする。
【解決手段】少なくとも作業部40の作業時において作業部40が被作業面に対して接離する方向に移動可能とするリンク機構に、ピストンで分断された、一方のシリンダ室の圧力を他方のシリンダ室の圧力より高く設定した油圧シリンダ15を、作業部40が被作業面側に向けて付勢されるように装着し、油圧シリンダ15の油圧回路中には、圧力を高く設定した方のシリンダ室の圧力が一定圧力以上となった場合に減圧させるための弁と、当該減圧させるための弁をバイパスするバイパス回路と、当該弁を経由するかバイパス回路を経由するかを決定する切換バルブとを設けたことにより上記課題を解決する。
(もっと読む)
走行車両
【課題】ハンドル2の押し下げ荷重が比較的軽い歩行型の走行車両を提供すること。
【解決手段】エンジン5からの動力を左右一対の走行車輪7,7にそれぞれ伝達する伝動機構を収納した左右一対の伝動ケース9,9と該伝動ケース9,9を連結機構9A,9B;9A,9Bを介して上下方向に回動させて左右の走行車輪7,7をそれぞれ上下動させる左右一対のアクチュエータ15,15と左右の走行車輪7,7への伝動をそれぞれ断つ左右一対のサイドクラッチとを設け、旋回外側の走行車輪7の駆動反力で旋回外側の伝動ケース9が更に下降するように旋回外側のアクチュエータ15と伝動ケース9との連結機構9A,9Bに長穴15aと該長穴15aに係止されるシャフト9Bのピン9Baからなる遊びを持たせた。
(もっと読む)
コンバインの刈取装置
【課題】刈取ユニットの切断性能及び搬送性能を安定させ、刈取効率を向上させる。
【解決手段】左右一対の上搬送ケース42・42及び下搬送ケース43・43と、その下方に配設する回転刈刃44とを刈取ユニット40として、左右に複数並設してなるコンバインの刈取装置6において、刈取ユニット40をプラットホーム31に平行リンク84・85を介して連結するとともに、該刈取ユニット40の対地高さ検出手段79を回転刈刃44の後方に設け、該対地高さ検出手段79の検出値に基づいて刈取ユニット40を設定された対地高さへアクチュエータ88により昇降させるように構成した。
(もっと読む)
1 - 10 / 10
[ Back to top ]